Procedimiento de detección y caracterización de un objetivo móvil sobre una imagen radar.
Procedimiento (80) de detección y caracterización de un objetivo móvil (13;
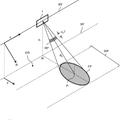
14) sobre una imagen SAR que representa los ecos de reflectividad de una zona iluminada por un haz de radar de un portador (101) formada por una repetición de adquisiciones radar (103), que comprende las siguientes etapas:
- una primera etapa (81) en la que se eliminan los ecos fijos estacionarios de alta reflectividad medidos sobre la imagen radar, comprendiendo dicha primera etapa las siguientes etapas:
- disminución de la reflectividad de los ecos móviles que consiste en conservar, para cada uno de los píxeles de la imagen radar, la reflectividad mínima sobre el conjunto de la repetición de adquisiciones radar,
- detección de los ecos fijos mediante una operación de umbralado,
- una segunda etapa (82) en la que se reduce la duración de integración por extracción de la porción de iluminación temporal central sobre la imagen radar,
- una tercera etapa (83) en la que se enfoca el eco del objetivo móvil mediante la aplicación de una corrección de la migración en distancia y de la migración en Doppler del objetivo móvil sobre la imagen radar,
- una cuarta etapa (84) en la que se extrae el objetivo móvil de la imagen radar, comprendiendo dicha cuarta etapa una operación de umbralado de los píxeles de la imagen radar,
- una quinta etapa (85) en la que se calcula la posición del objetivo y las componentes del vector de velocidad del objetivo, de las cuales al menos la componente proyectada sobre la ruta del portador, obtenida según la siguiente relación:**Fórmula**
en las que:
- t representa el tiempo;
- λ: longitud de onda;
- Rc: la distancia entre dicho portador y dicho objetivo;
- Ø 2,CIM(t): el desenfocado residual de dicho objetivo;
- VcV: componente del vector de velocidad del objetivo según la ruta de un avión;
- kamb: rango de ambigüedad Doppler del objetivo;
- Mc: posición aparente del objetivo, es decir, la posición del punto del suelo situado a la misma distancia que el objetivo;
- fdM: frecuencia Doppler del punto Mc;
- fr: frecuencia de recurrencia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/050737.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: Tour Carpe Diem - Place des Corolles, Esplanade Nord 92400 Courbevoie FRANCIA.
Inventor/es: BOSSER,LUC, HOTTIER,VINCENT, LE FOLL,DIDIER, SFEZ,THIERRY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/538 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › suprimiendo los objetos que no se han movido entre dos barridos de antena sucesivos, p. ej. area MTi.
- G01S13/90 G01S 13/00 […] › que utilizan técnicas de apertura sintética.
PDF original: ES-2698382_T3.pdf
Patentes similares o relacionadas:
 Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Radar de formación de imágenes subsuperficie, del 22 de Abril de 2020, de SAAB AB: Un procedimiento para eliminar los ecos parásitos superficiales en el radar de apertura sintética, SAR, formación de imágenes de objetivos de subsuperficie […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
Radar interferométrico con antena giratoria, del 25 de Diciembre de 2019, de UNIVERSITA' DEGLI STUDI DI FIRENZE: Un radar interferométrico, que comprende: un brazo , que gira con respecto a un eje (z) de un plano (zx) ortogonal a un eje de rotación (y); un […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]
Procedimiento para el funcionamiento de un sistema de radar con apertura sintética en el modo de emisión y recepción, del 1 de Mayo de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el funcionamiento de un sistema de radar asistido por satélite con apertura sintética, donde el sistema de radar comprende […]