Procedimiento para manejar un robot industrial.
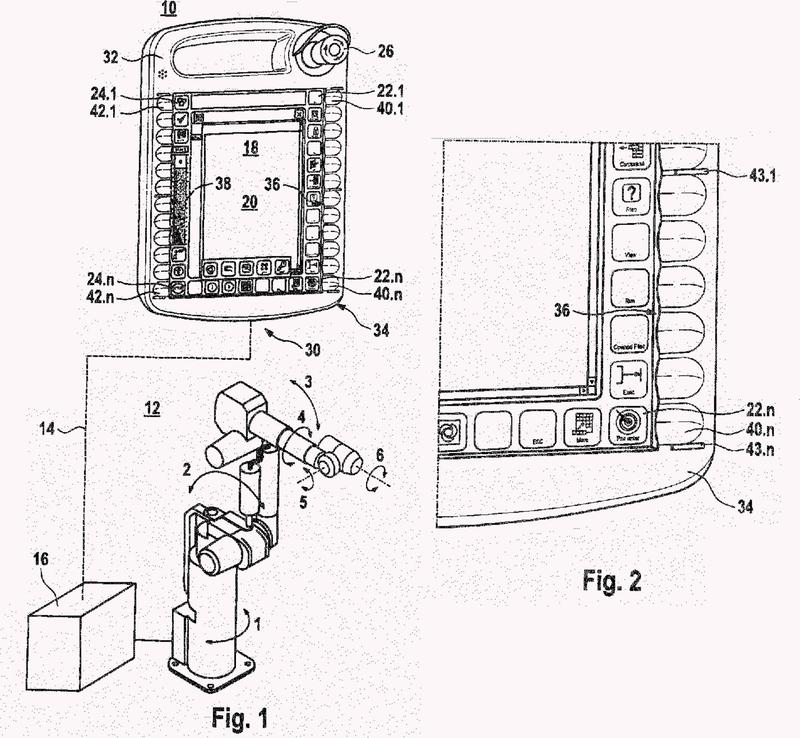
Procedimiento para manejar un robot industrial (12) mediante un dispositivo de mando (10) que comprende la etapa de procedimiento de tocar un elemento de mando virtual de una pantalla táctil (20) de una interfaz gráfica de usuario,
en el que, en caso de tocar el elemento de mando virtual, se desencadena una función asignada al elemento de mando, y en el que se realiza el movimiento del robot industrial (12) con respecto a un sistema de coordenadas de robot y el movimiento sobre la pantalla táctil (20) con respecto a un sistema de coordenadas de pantalla, caracterizado por que el sistema de coordenadas de pantalla se recalibra tras un movimiento relativo del dispositivo de mando (10) con respecto al sistema de coordenadas de robot mediante un movimiento dirigido de un dedo de una persona operadora sobre la pantalla táctil (20), por que el recalibrado se activa mediante una operación de un elemento de mando virtual, por que el movimiento dirigido del dedo sobre la pantalla táctil (20) se detecta en una dirección seleccionada del sistema de coordenadas de robot y por que, tras levantar el dedo, se calcula una dirección vectorial usada para el recalibrado entre un primer punto de contacto y un punto de liberación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2013/057197.
Solicitante: Reis Group Holding GmbH & Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Walter-Reis-Str. 1 63785 Obernburg ALEMANIA.
Inventor/es: SOM,FRANZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › Puestos de control, p. ej. pupitres, cuadros de mando.
- G05B19/409 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por la utilización de la entrada manual de datos (MDI) o por la utilización de un panel de control, p. ej. control de funciones con el panel; caracterizado por los detalles del panel de control, por el establecimiento de parámetros (G05B 19/408, G05B 19/4093 tienen prioridad).
PDF original: ES-2603205_T3.pdf
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES, del 8 de Septiembre de 2011, de KUKA ROBOTER GMBH: Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de […]
SISTEMA PARA PROGRAMAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, QUE COMPRENDE UN TERMINAL DE PROGRAMACION PORTATIL., del 16 de Mayo de 2007, de COMAU S.P.A.: Sistema de programación para un robot, o un aparato automático similar, que contiene una herramienta , comprendiendo el sistema una unidad de control […]
 TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, del 28 de Octubre de 2009, de COMAU S.P.A.: Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control de movimientos según los ejes […]
TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, del 28 de Octubre de 2009, de COMAU S.P.A.: Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control de movimientos según los ejes […]
Un panel de control y receptáculo para un equipo de movimiento de tierra, del 23 de Octubre de 2019, de Leica Geosystems Technology A/S: Un panel de control (C) y un receptáculo (R) adaptado para su uso en equipos de movimiento de tierra, en el que el panel de control (C) - […]
Dispositivo de configuración del número de compensación, del 21 de Agosto de 2019, de CITIZEN WATCH CO. LTD.: Un dispositivo de configuración del número de compensación que comprende: un monitor que muestra una pantalla de selección de superficie de […]
 Método y dispositivo que generan automáticamente programas de operación, del 29 de Mayo de 2019, de Musashi Engineering, Inc: Un método para generar automáticamente un programa de operación, que hace que un cabezal de trabajo se mueva en relación con un objeto de trabajo […]
Método y dispositivo que generan automáticamente programas de operación, del 29 de Mayo de 2019, de Musashi Engineering, Inc: Un método para generar automáticamente un programa de operación, que hace que un cabezal de trabajo se mueva en relación con un objeto de trabajo […]
Procedimiento y sistema para la detección, transmisión y evaluación de señales orientadas a la seguridad, del 10 de Abril de 2019, de Elan Schaltelemente GmbH & Co. KG: Procedimiento para la detección, transmisión y evaluación de al menos una señal orientada a la seguridad (S1...Sn), detectándose la al menos una […]
Sistema de control, consola de operador y soporte de datos móvil para una máquina herramienta, del 28 de Marzo de 2019, de DMG MORI SEIKI AKTIENGESELLSCHAFT: Sistema para el control de una máquina herramienta de control numérico por parte de un usuario, incluyendo - una consola de operador que es operable por el usuario; […]