Adaptación del comportamiento de un robot basándose en la interacción persona-robot.
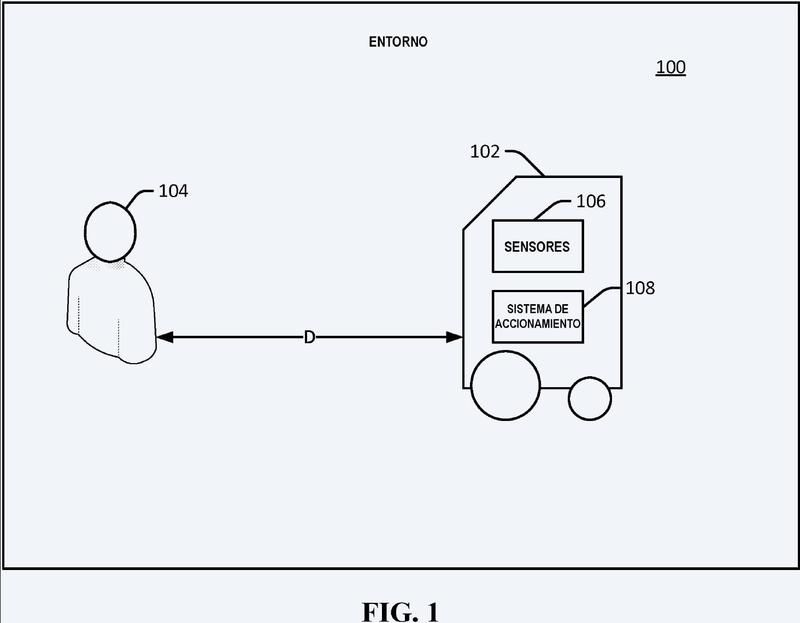
Un método (400) para adaptar automáticamente el comportamiento de un dispositivo robótico móvil (102) con el fin de aumentar la probabilidad de que el dispositivo robótico móvil (102) complete con éxito una tarea (408) que implica la interacción con una persona (104),
de tal manera que una ultimación con éxito de la tarea comprende hacer que la persona (104) se involucre con el dispositivo robótico móvil (102), siendo el método (400) ejecutado por un procesador (220) del dispositivo robótico móvil (102), de tal manera que el método (400) comprende:
recibir datos (302) de sensores, que comprenden una primera señal suministrada como salida por un primer sensor (404), de tal manera que la primera señal indica que hay una persona (104) en un entorno (100) del dispositivo robótico móvil (102), y una segunda señal suministrada como salida por un segundo sensor (406), de tal modo que la segunda señal es indicativa de una primera condición del dispositivo robótico móvil (102), de tal manera que la primera condición está sometida al control por el dispositivo robótico móvil (102), y la primera condición se identifica como relevante para la probabilidad de que el dispositivo robótico móvil (102) complete la tarea (408) con éxito; estando el método (400) caracterizado por que comprende, adicionalmente:
identificar una acción que debe adoptarse por el dispositivo robótico móvil (102), de tal manera que la acción se identifica para aumentar la probabilidad de completar con éxito la tarea, identificándose la acción basándose, al menos en parte, en los datos (302) de sensores recibidos, y un modelo (306) que representa éxitos y fallos de tentativas pasadas del dispositivo robótico móvil (102) para completar la tarea (408) con otras personas (104); transmitir una señal a un dispositivo de accionamiento (410) del dispositivo robótico móvil (102) para hacer que el dispositivo robótico móvil (102) lleve a cabo la acción como tentativa para completar la tarea (408);
identificar una indicación con respecto a si el robot (102) ha completado con éxito la tarea (408) basándose en una reacción de la persona (104) ante el robot (102) que lleva a cabo la acción; y
proporcionar los datos (302) de sensores, la acción adoptada y la indicación identificada con respecto a si el robot (102) ha completado con éxito la tarea (408), a fin de adaptar el modelo (306).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2014/019178.
Solicitante: Microsoft Technology Licensing, LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ESTADOS UNIDOS DE AMERICA.
Inventor/es: FLORENCIO,DINEI A, MACHARET,DOUGLAS GUIMARAES, BOHUS,DAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06N3/00 FISICA. › G06 CALCULO; CONTEO. › G06N SISTEMAS DE COMPUTADORES BASADOS EN MODELOS DE CALCULO ESPECIFICOS. › Sistemas de computadores basados en modelos biológicos.
- G06Q30/02 G06 […] › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › G06Q 30/00 Comercio, p.e. compras o comercio electrónico. › Comercialización, p. ej. investigación y análisis de mercado, encuestas, promociones, publicidad, perfil del comprador, gestión de clientes o gratificaciones; Estimación de precio o determinación.
PDF original: ES-2608808_T3.pdf
Patentes similares o relacionadas:
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Diseño de transcriptoma completo de moléculas pequeñas bioactivas, selectivas que seleccionan como diana ARN, del 27 de Marzo de 2019, de THE SCRIPPS RESEARCH INSTITUTE: Compuesto para su uso en el tratamiento de cáncer en un sujeto, en el que dicho compuesto es cualquiera de**Fórmula** o cualquier combinación de […]
NÚCLEO IP, ARQUITECTURA QUE COMPRENDE UN NÚCLEO IP Y PROCEDIMIENTO DE DISEÑO DE UN NÚCLEO IP, del 25 de Enero de 2019, de UNIVERSIDAD DEL PAIS VASCO-EUSKAL HERRIKO UNIBERTSITATEA: Núcleo IP, arquitectura que comprende un núcleo IP y procedimiento de diseño de un núcleo IP. Un núcleo IP configurable y programable de procesamiento […]
PROCEDIMIENTO, SISTEMA, SISTEMA INFORMÁTICO Y PROGRAMA INFORMÁTICO PARA GENERAR DATOS DE UNA PREDICCIÓN DE ACOPIO DE UN PRODUCTO AGRÍCOLA, del 13 de Septiembre de 2018, de EASYTOSEE AGTECH SOCIEDAD LIMITADA: Procedimiento, sistema, sistema informático y programa informático para generar datos de una predicción de acopio de un producto agrícola que tiene un ciclo de vida. […]
PROCEDIMIENTO, SISTEMA, SISTEMA INFORMÁTICO Y PROGRAMA INFORMÁTICO PARA GENERAR DATOS DE UNA PREDICCIÓN DE ACOPIO DE UN PRODUCTO AGRÍCOLA, del 11 de Septiembre de 2018, de EASYTOSEE AGTECH SOCIEDAD LIMITADA: Procedimiento, sistema, sistema informático y programa informático para generar datos de una predicción de acopio de un producto agrícola que tiene un ciclo […]
SISTEMA Y MÉTODO ESCALABLE DE ACELERACIÓN POR HARDWARE PARA ALMACENAR Y RECUPERAR INFORMACIÓN, del 26 de Mayo de 2017, de UNIVERSIDAD DE CANTABRIA: La presente invención se refiere a un método y un sistema de aceleración por hardware para almacenar y recuperar información, que implementa un algoritmo […]
Reconocimiento óptico de caracteres de baja resolución para documentos adquiridos con cámara, del 12 de Octubre de 2016, de Microsoft Technology Licensing, LLC: Un sistema que facilita el reconocimiento óptico de caracteres, OCR, de símbolos de baja resolución, en el que una cadena de símbolos es representativa de una palabra, […]
Sistema y método escalable de aceleración por hardware para almacenar y recuperar información, del 9 de Febrero de 2016, de UNIVERSIDAD DE CANTABRIA: La presente invención se refiere a un método y un sistema de aceleración por hardware para almacenar y recuperar información, que implementa un algoritmo de aprendizaje […]