Vehículo planeador submarino.
1. Vehículo planeador submarino compuesto de un cuerpo principal (1) ,
un cuerpo de entrada (2), un cuerpo de salida (3) y una superficie sustentadora tipo ala elíptica (4) caracterizado por el uso de una propulsión por sustentación.
2. Vehículo planeador submarino según la reivindicación 1 caracterizado por un sistema hidráulico de flotabilidad, alojado en el cuerpo principal (1), que induce un movimiento de arfada en el vehículo, el cual en conjunto con una superficie sustentadora tipo ala elíptica (4) dotan al vehículo de una propulsión por sustentación.
3. Vehículo planeador submarino según la reivindicación 1 caracterizado por el uso de un sistema electromecánico, alojado dentro del cuerpo principal (1), para el control del cabeceo y el balance del vehículo.
4. Vehículo planeador submarino según la reivindicación 1 caracterizado por el uso de un sistema electrónico, alojado dentro del cuerpo principal (1), para la monitorización, navegación, maniobrabilidad y comunicación del vehículo.
5. Vehículo planeador submarino según la reivindicación 1 caracterizado por disponer de un compartimento de libre disposición destinado a albergar sistemas extras seleccionados acorde a la misión a realizar.
6. Vehículo planeador submarino según la reivindicación 1 caracterizado porque el cuerpo de entrada (2) y el cuerpo de salida (3) pueden albergar sensores que faciliten la navegación tales como altímetros y sensores de presión y/o elementos auxiliares de propulsión convencional tipo hélice o bomba.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201400671.
Solicitante: BOTIA VERA, Elkin Mauricio.
Inventor/es: BOTIA VERA,Elkin Mauricio, MAS SOLER,Jordi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63C11/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00). › con control independiente de propulsión y de dirección.
Fragmento de la descripción:
VEHÍCULO PLANEADOR SUBMARINO.
Sector de la técnica
Vehículo planeador submarino no tripulado, con o sin propulsión extra de tipo convencional, entendiéndose por propulsión convencional al uso de propulsores externos tipo hélice o tipo bomba. La propulsión de este vehículo se basa, fundamentalmente, en el planeo y la definiremos como propulsión por sustentación. Modificando el volumen del vehículo mediante el uso de un sistema hidráulico de flotabilidad, el vehículo asciende y desciende, lo que se conoce como arfada, la profundidad de descenso depende principalmente de la presión de trabajo del sistema hidráulico. Durante la arfada, el uso de una superficie sustentadora tipo ala elíptica, le confiere al vehículo la posibilidad de avanzar gracias a la sustentación que se genera en dicha superficie.
El sistema hidráulico encargado de la flotabilidad del vehículo tan solo es accionado al inicio y al final del planeo, por tanto el consumo energético es mínimo en comparación con otros vehículos submarinos. El bajo consumo energético le confiere al vehículo una autonomía elevada, dicha autonomía es de interés cuando la misión consiste en recorrer largas distancias y recopilar información de tipo científico, industrial o militar.
Durante la fase de planeo, una vez accionado el sistema hidráulico, un segundo sistema se encarga de la maniobrabilidad del vehículo, este sistema electromecánico compuesto de motores y engranajes, consigue que un peso móvil se traslade longitudinalmente y rote transversalmente. Por cuestiones de espacio este peso móvil se compone de las propias baterías del vehículo. La traslación del peso móvil induce el cabeceo y la rotación del mismo induce el balance del vehículo. Combinando el cabeceo, el balance y la sustentación se obtiene la guiñada o rumbo del vehículo.
Mediante algoritmos de control y sensores de navegación se consigue que el vehículo desarrolle una serie de trayectorias predefinidas durante la misión. Dichas trayectorias se repiten cíclicamente hasta alcanzar una ubicación específica.
Durante la fase de navegación el vehículo se orienta únicamente con sus sensores de navegación. Una vez completada la misión o una fase de esta, según este programado, el vehículo emerge completamente a superficie. El vehículo se encuentra dotado de sistemas de localización y de comunicaciones vía satélite, el sistema de localización basado en sistemas de posicionamiento global GPS, permite conocer la ubicación del vehículo cuando este emerge a superficie y es usado también para reorientar el vehículo. La comunicación satelital permite que el vehículo envié información relevante sobre la misión en curso y recibe parámetros sobre la modificación o cancelación de la actual misión.
Estado de la técnica
Existen numerosos vehículos submarinos no tripulados, la mayoría poseen propulsión de tipo convencional, no consiguiéndose en ninguno de ellos una propulsión por sustentación o una combinación de esta misma con una propulsión convencional. Dichas referencias de solicitudes se citan a continuación:
1) VEHICULO SUBMARINO OPERADO POR CONTROL REMOTO Número de
publicación: W02009024639 Al (26.02.2009). W02009024639 A4
(30.04.2009) Solicitante CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC)(ES) C/SERRANO, 117 E-28006 MADRID, España
2) VEHICULO SUBMARINO AUTOPROPULSADO CONTROLADO A DISTANCIA Número de publicación ES2007966 A6 (01.07.1989). Solicitante REMOTELY OPERATED VEHICLES LIMITED. (AU) SUITE 4, 111 COLIN STREET. WEST PERTH, 6005 WESTERN AUSTR
3) SUBMARINO. Número de publicación: ES2341899 T3 (29.06.2010)
Solicitante: HOWALDTSWERKE-DEUTSCHE WERFT GMBH (DE)
WERFTSTRASSE 112-114, 24143 KIEL
4) VEHICULO SUBMARINO NO HABITADO, AUTOPROPULSADO, DE GRAN PROFUNDIDAD. Número de publicación: ES0469417 Al (01.04.1979). Solicitante: RENE HERVIEU (FR)
5) VEHICULO SUBMARINO. Número de publicación: ES2118448 T3
(16.09.1998). Solicitante: STN ATLAS ELEKTRONIK GMBH
(DE) SEBALDSBRUCKER HEERSTRASSE 235, D-28305 BREMEN
6) VEHICULO SUBMARINO AUTOPROPULSADO PARA LA DETECCION DE
OBJETOS INMERGIDOS. Número de publicación: ES2030985 T3 (16.11.1992). Solicitante: ETAT-FRANCAIS REPRESENTE PAR LE DELEGUE GENERAL POUR L'ARMEMENT (DPAG) (FR) BUREAU DES BREVETS ET INVENTIONS DE LA DELEGATION GENERALE POUR L'ARMEMENT 26, B, F-75996 PARIS ARMEES
7) VEHICULO SUMERGIBLE. Número de publicación: ES2326694 T3
(16.10.2009). Solicitante: GO SCIENCE LIMITED (GB) WHITERS & ROGERS LLP GOLDINGS HOUSE 2 HAYS LAÑE, LONDONSE1 2HW
8) VEHICULO SUBMARINO DESTINADO A TOMAR DATOS EN EL FONDO DEL OCEANO. Número de publicación: ES2030921 T3 (16.11.1992). Solicitante: EUROPEAN ATOMIC ENERGY COMMUNITY (EURATOM) (LU) BATIMENT JEAN MONNET PLATEAU DU KIRCHBERG BOaeTE POSTALE 1907, L-2920 LUXEMBOURG
9) VEHICULO SUBMARINO NO TRIPULADO Y DISPOSITIVO PARA LA CONEXION
DE UN CABLE DE FIBRA OPTICA A UN VEHICULO SUBMARINO NO TRIPULADO. Número de publicación: ES2424799 T3 (08.10.2013).
Solicitante: ATLAS ELEKTRONIK GmbH (100.0%) (DE) Sebaldsbrücker Heerstrasse 235 28309 Bremen ALEMANIA
Descripción de la invención.
Se puede describir el artefacto como un vehículo planeador submarino de tipo autónomo, cuya propulsión principal se basa en el planeo y que puede contar o no con propulsión de tipo convencional. Esta vehículo se caracteriza básicamente por presentar una serie de elementos propios los cuales le otorgan una serie de virtudes que constituyen un conjunto cuyas aplicaciones son numerosas.
Los principales elementos con los que cuenta el vehículo se pueden desglosar de la forma que sigue:
- Cuerpo principal. Cuerpo cilindrico estanco que alberga todos elementos necesarios para el funcionamiento del vehículo; en conjunto representa un sistema de una gran complejidad de definición e integración, caracterizado por contar con los elementos mecánicos de maniobrabilidad, elementos electrónicos de control, baterías, sistemas de comunicación y sensores, además de disponer de una sección de libre uso llamada carga de pago que se acondicionara acorde a la misión. Debido a la gran complejidad que representa la ingeniería de detalle de estos sistemas y no siendo objetivo del presente documento no se entrará en su descripción.
Cuerpos de entrada y salida. En conjunto con el cuerpo principal, estos dos cuerpos, situados a proa y popa del vehículo, son los encargados de dotar al vehículo con unas formas fusiformes suficientemente optimizadas para la maximización de su rendimiento hidrodinámico. Estos dos cuerpos se caracterizarán principalmente por ser semi-esferoides o semi-elipsoides de revolución los cuales presentarán unas características geométricas propias determinadas por el diseñador en función de las dimensiones que presente el cuerpo principal.
- Superficie sustentadora. Es el elemento fundamental necesario para conseguir la propulsión por sustentación del vehículo. Debido a la particularidad del diseño presentado, en este caso se ha empleado una superficie sustentadora tipo ala elíptica la cual cumple con las especificaciones necesarias para que se produzca el planeo en unas condiciones hidrodinámicas de mayor rendimiento y muy favorables en comparación con una superficie sustentadora tipo ala plana convencional. Además se trata de un elemento estructural que rigidiza el propio vehículo además de brindar un gran abanico de posibilidades de puesta a flote como pueden ser las descritas seguidamente. La primera de ellas de gran interés es el lanzamiento desde un tubo lanza torpedos o desde un artefacto volador: avión, misil, etc. Además la geometría de la superficie sustentadora
tipo ala elíptica, favorece la aceleración de flujos, lo que permite la inclusión de elementos de aprovechamiento energético (como puede ser la implementación de un rotor de flujo axial) en la misma con unos rendimientos y capacidades muy interesantes para esta aplicación y aumento de su autonomía, como título de ejemplo.
Propulsión. Este tipo de vehículo además de contar con la propulsión por sustentación descrita anteriormente. También puede contar con una propulsión convencional, esta propulsión le permitirá al vehículo desplazarse siguiendo una ruta muy concreta con velocidades puntas mayores a las que se pueden obtener con la propulsión por sustentación.
Descripción de las figuras
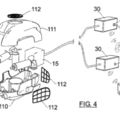
La Figura 1 corresponde a una vista en perspectiva del vehículo planeador submarino de acuerdo con una primera realización de la presente invención. El vehículo esta constituido por un cuerpo principal (1), un cuerpo de entrada (2), un cuerpo de salida salida...
Reivindicaciones:
1. Vehículo planeador submarino compuesto de un cuerpo principal (1) , un cuerpo de entrada (2), un cuerpo de salida (3) y una superficie sustentadora tipo ala elíptica (4) caracterizado por el uso de una propulsión por sustentación.
2. Vehículo planeador submarino según la reivindicación 1 caracterizado por un sistema hidráulico de flotabilidad, alojado en el cuerpo principal (1), que induce un movimiento de arfada en el vehículo, el cual en conjunto con una superficie sustentadora tipo ala elíptica (4) dotan al vehículo de una propulsión por sustentación.
3. Vehículo planeador submarino según la reivindicación 1 caracterizado por el uso de un sistema electromecánico, alojado dentro del cuerpo principal (1), para el control del cabeceo y el balance del vehículo.
4. Vehículo planeador submarino según la reivindicación 1 caracterizado por el uso de un sistema electrónico, alojado dentro del cuerpo principal (1), para la monitorización, navegación, maniobrabilidad y comunicación del vehículo.
5. Vehículo planeador submarino según la reivindicación 1 caracterizado por disponer de un compartimento de libre disposición destinado a albergar sistemas extras seleccionados acorde a la misión a realizar.
6. Vehículo planeador submarino según la reivindicación 1 caracterizado porque el cuerpo de entrada (2) y el cuerpo de salida (3) pueden albergar sensores que faciliten la navegación tales como altímetros y sensores de presión y/o elementos auxiliares de propulsión convencional tipo hélice o bomba.
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN, del 4 de Octubre de 2018, de FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO: Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de […]
VEHICULO SUBMARINO NO TRIPULADO PARA INSPECCION DE EMISARIOS, del 29 de Mayo de 2018, de Seys MedioAmbiente, S.L: 1. Vehículo submarino no tripulado (ROV) para inspección de emisarios caracterizado por estar constituido por los siguientes elementos. Un vehículo submarino no tripulado […]
Dispositivo para dragar material de suelo bajo el agua, del 25 de Abril de 2018, de Tideway B.V: Dispositivo para verter material sobre un fondo o instalación submarina, tal como una canalización, comprendiendo el dispositivo: - una embarcación , provista […]
 VEHICULO SUBMARINO OPERADO POR CONTROL REMOTO, del 11 de Enero de 2010, de ALBATROS MARINE TECHNOLOGIES, S.L: Vehículo submarino operado por control remoto que comprende el propio vehículo y una unidad de control exterior, encargada de suministrar al vehículo señales […]
VEHICULO SUBMARINO OPERADO POR CONTROL REMOTO, del 11 de Enero de 2010, de ALBATROS MARINE TECHNOLOGIES, S.L: Vehículo submarino operado por control remoto que comprende el propio vehículo y una unidad de control exterior, encargada de suministrar al vehículo señales […]
APARATO PARA DESPLEGAR UN OBJETO HASTA UNA POSICION OBJETIVO SUBMARINA Y METODO DE CONTROL DE DICHO APARATO., del 16 de Mayo de 2005, de BERNARD, FRANCOIS: Aparato para desplegar un objeto hasta una posición objetivo submarina, dotado de una baliza para transmitir rayos acústicos a […]
VEHICULOS DE CONTROL REMOTO., del 16 de Julio de 2004, de H2EYE (INTERNATIONAL) LIMITED: Cable umbilical para un ROV para transportar señales entre una parte sobre cubierta y un sumergible subacuático del ROV, requiriendo el […]
 DISPOSICION DE UN CONJUNTO ACUSTICO CON MEDIDOR DE VELOCIDAD DEL SONIDO, del 16 de Diciembre de 2008, de BERNARD, FRANCOIS: Disposición comprendiendo un conjunto acústico con un medidor de velocidad de sonido , adecuado para estar dispuesto debajo del agua, el conjunto acústico […]
DISPOSICION DE UN CONJUNTO ACUSTICO CON MEDIDOR DE VELOCIDAD DEL SONIDO, del 16 de Diciembre de 2008, de BERNARD, FRANCOIS: Disposición comprendiendo un conjunto acústico con un medidor de velocidad de sonido , adecuado para estar dispuesto debajo del agua, el conjunto acústico […]