SISTEMA Y MÉTODO PARA CONTROL DE ESTABILIDAD EN MAQUINARIA PESADA.
Un sistema y un método para control de estabilidad en maquinaria pesada del tipo que incluye cadenas u orugas para desplazarse,
basado en evaluación de riesgo de vuelco asociado a su posición de trabajo, incluye múltiples detectores que miden el valor de las reacciones en los puntos de apoyo de la máquina sobre el terreno, y la determinación en cada instante de una base de sustentación definida por los apoyos reales de la máquina. El sistema incluye un algoritmo de cálculo del riesgo de vuelco que toma en consideración los momentos de vuelco asociados a cada lado de la base de sustentación. Además, el sistema incluye calcular una condición de vuelco reversible donde se define un índice de riesgo de vuelco que es una función de proporcionalidad asociada a la posición del centro de gravedad de la máquina respecto a los límites de la zona de vuelco reversible.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331660.
Solicitante: EMPRESA DE TRANSFORMACION AGRARIA, S.A. (TRAGSA).
Nacionalidad solicitante: España.
Inventor/es: LOPEZ HERNANDEZ,MANUEL, CALERO GIL,RODRIGO, MOLANO SANCHEZ, JULIO, DOMINGUEZ ABASCAL,JAIME, Galán Benzal,Luis Antonio, MARTIN MOYA,Miguel Jesús, AYLLÓN GUEROLA,Juan Manuel, MALPARTIDA CORRALES,Salvador, COSANO PORRAS,Inmaculada Concepción, SEDEÑO MARIN,Ignacio Manuel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E02F9/24 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Dispositivos de seguridad.
- E02F9/26 E02F 9/00 […] › Dispositivos indicadores.
Fragmento de la descripción:
"SISTEMA Y MÉTODO PARA CONTROL DE ESTABILIDAD EN MAQUINARIA PESADA"
DESCRIPCIÓN 5
Objeto de la Invención La presente invención se refiere a un sistema y un método para control de estabilidad en maquinaria pesada, que aporta esenciales características de novedad y notables 10 ventajas con respecto a los medios conocidos y utilizados para los mismos fines en el estado actual de la técnica.
Más en particular, la invención se refiere a un sistema y un método de control de estabilidad especialmente 15 aplicables a maquinaria pesada, especialmente a máquinas del tipo de las que incluyen cadenas u orugas para su desplazamiento, estando la operatividad del sistema basada en conocer en cada instante el valor de las reacciones en los puntos de apoyo de la máquina sobre el terreno, a 20 partir de los cuales, se determinaran los momentos de vuelco de la máquina con respecto a un recinto poligonal cerrado proporcionado por los puntos de apoyo reales de la máquina sobre la superficie de sustentación, así como la determinación de la característica de reversibilidad de 25 vuelco en base al análisis del valor del momento generado por las fuerzas gravitatorias que actúan sobre el sistema en torno a uno de los lados del recinto poligonal cerrado sobre el que se sustenta la máquina.
El campo de aplicación de la invención se encuentra comprendido dentro del sector industrial dedicado al desarrollo e instalación de sistemas de seguridad estática y dinámica en maquinaria pesada, especialmente máquinas de obras públicas y similares movidas con cadenas u orugas. 35
Antecedentes y Sumario de la Invención Se conocen en el estado actual de la técnica una amplia diversidad de dispositivos y métodos destinados a la determinación del riesgo de vuelco de una máquina o un vehículo de cualquier tipo mientras se está haciendo un uso 5 normal del mismo tanto en condiciones estáticas como dinámicas, ya sea como consecuencia del uso realizado o ya sea como consecuencia de otros efectos derivados o inducidos por situaciones ajenas al propio vehículo (por ejemplo, accidentes de tráfico o similar) . En la mayor 10 parte de los dispositivos y/o métodos de la técnica actual, la determinación de una eventual situación de vuelco se realiza mediante la utilización de varios sensores que por lo general son sensores de inclinación ubicados en diversas posiciones del vehículo, que detectan y miden parámetros 15 relacionados con las condiciones de verticalidad de ciertos órganos del vehículo, y que generan señales que son procesadas y comparadas con valores de umbral preestablecidos y considerados como límites admisibles para garantizar la seguridad del vehículo. Normalmente, los 20 parámetros mencionados se obtienen a partir de la medición de ángulos relacionados con el balanceo y/o la inclinación del vehículo, de manera que cuando estos ángulos de balanceo y/o inclinación superan tales umbrales preestablecidos, se considera situación de riesgo de vuelco 25 y se genera una multiplicidad de reacciones que abarcan desde una simple alarma que avisa mediante señales luminosas y/o acústicas al usuario o a los medios de control sobre la situación planteada, hasta la activación de otros elementos de seguridad para contrarrestar la 30 situación de vuelco eventual como por ejemplo la activación de los frenos delanteros y/o traseros del móvil, una reducción consiguiente de la velocidad de desplazamiento, una corrección de los ángulos de giro, la extensión y despliegue de medios de seguridad incorporados en el propio 35 vehículo, etc.
Ahora bien, cuando se trata de máquinas que realizan labores de campo (por ejemplo, retroexcavadores destinadas a funciones de acondicionamiento del terreno, máquinas 5 agrícolas, etc.) , se presentan en la práctica situaciones que aun siendo generadoras de posiciones de la máquina que en muchos casos pueden conducir a inclinaciones que superen esos ángulos considerados previamente como límites o umbrales operativos, no generan sin embargo un riesgo de 10 vuelco real. Se puede mencionar, como ejemplo, el caso de una máquina de tipo retroexcavadora que está realizando labores de acondicionamiento del terreno, y que a consecuencia del esfuerzo realizado con el cazo cuando lo intenta clavar en el terreno, se puede ocasionar una 15 reacción que provoque una elevación parcial de la máquina con respecto al borde de apoyo del chasis de la máquina que ocupa una posición opuesta al brazo portador del cazo de trabajo, lo que junto con la propia inclinación a la que ya pueda estar sometida la máquina a consecuencia de los 20 declives de la propia superficie del terreno en la que está apoyada, supone la adopción de un ángulo de inclinación que rebasa los límites del umbral preestablecido, generándose avisos de peligro que en realidad no constituyen un riesgo de vuelco real, y que sin embargo obligan a detener la 25 función que en ese momento se esté realizando. Todo esto constituye inconvenientes que generan retrasos, pérdidas de tiempo, e incremento de los costes de producción.
Como ejemplo ilustrativo de los sistemas antivuelco 30 actualmente conocidos y utilizados en relación con maquinaria del tipo comentado, los inventores del sistema descrito en la presente invención son conocedores de la existencia en el estado de la técnica de algunos antecedentes que van a ser comentados brevemente a 35 continuación. Así, el documento WO 2008/105997 (Caterpillar Inc.) describe un sistema automatizado de prevención de vuelco aplicable a maquinaria pesada, destinado a controlar la máquina de forma remota y autónoma, en el que se utiliza uno o más sensores de inclinación y/o de otras magnitudes 5 con los que se generan señales indicativas de la inclinación de la máquina de manera que un dispositivo controlador puede determinar la detención de su funcionamiento cuando la inclinación de la máquina supera ciertos niveles de umbral, así como el retroceso de la 10 máquina hasta la última posición estable conocida.
El documento de Patente Europea EP-2492404 A1 (Hitachi Construction Machiner y Co., Ltd.) describe una máquina especialmente útil en trabajos de construcción, demolición, 15 ingeniería civil y similares, en la que se pretende proporcionar en todo momento estabilidad a la máquina solucionando el problema asociado a las fuerzas de inercia derivadas del movimiento, hacia arriba y hacia abajo con respecto al chasis de la máquina, del mecanismo de un 20 accesorio de trabajo delantero, o del movimiento de la propia máquina, evaluando en cada instante la estabilidad de la máquina y comunicando los resultados de esa evaluación a un operador sin retardos. A tal efecto, la máquina incluye: (i) medios de cálculo de un Punto de 25 Momento Cero (identificado como ZMP por sus iniciales en inglés) , utilizando para ello vectores de posición, vectores de aceleración y vectores de fuerzas externas en puntos de masa respectivos constitutivos del chasis principal, incluyendo el mecanismo de trabajo delantero y 30 el bastidor inferior, y (ii) medios de cálculo de estabilidad previstos para definir un polígono de soporte uniendo puntos de apoyo en tierra de la máquina de trabajo y de modo que cuando el ZMP esté incluido en una zona de aviso formada en el interior de un perímetro del polígono 35 de soporte, producir un aviso de vuelco. Los polígonos de soporte a los que se refiere el documento EP-2492404 A1 aparecen representados en las Figuras 5, 7, 8, 9 (a) , 9 (b) , 9 (c) , 9 (d) , 17 (a) , 17 (b) y 17 (c) , polígonos soporte sobre los que se determinan las regiones de riesgo representadas 5 en las figuras 4 (a) , 4 (b) , 6 (a) y 6 (b) . Sin embargo, en todos los ejemplos descritos, el polígono soporte viene determinado por la geometría definida por el modo de sustentación de la máquina (cadenas, ruedas o estabilizadores) , sin el contraste real de elementos 10 detectores que permitan la determinación precisa, en cada instante, de los puntos reales de apoyo de la máquina sobre el terreno. Es por este motivo por lo que la patente Europea EP-2492404 A1 (Hitachi Construction Machiner y Co., Ltd.) no tiene aplicación en superficies de sustentación 15 cóncavas como se describe explícitamente en la línea 38 de la página 3 de dicha patente.
Además, la experiencia acredita que cuando se trabaja con este tipo de máquinas, se presentan otras situaciones 20 que no están contempladas en el documento EP-2492404 A1 como es, por ejemplo, el hecho de que la máquina no esté completamente soportada por el terreno, es decir, una parte de la máquina trabaje sobre una superficie incompleta, con una porción en voladizo, en cuyo caso el polígono de 25 soporte no puede estar determinado por la geometría definida por el modo de sustentación de la máquina (cadenas,...
Reivindicaciones:
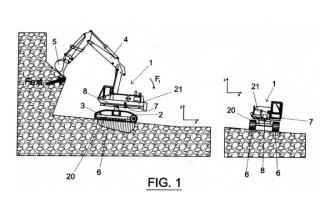
1. Sistema para control de estabilidad en maquinaria 5 pesada, en especial un sistema capacitado para ser implementado en una máquina (1) del tipo de una retroexcavadora u otra de naturaleza similar movida por cadenas u orugas (2) , destinado a determinar la estabilidad de la máquina mediante la evaluación del riesgo de vuelco 10 asociado a las distintas posiciones adoptadas por la máquina durante las diversas fases de trabajo, contando la máquina con un carro (20) , una torreta (21) vinculada al carro (20) por medio de un eje de giro (8) y dotada de un brazo (4) extensible que porta en su extremo libre una 15 herramienta de trabajo tal como un cazo (5) o similar, en el que dicho sistema incluye:
una multiplicidad de elementos detectores (9) encargados de generar y proporcionar señales eléctricas destinadas a la determinación precisa en tiempo real de una 20 base de sustentación encerrada por un perímetro (10) y medir el valor de las reacciones en los puntos de apoyo de la máquina en cada instante;
medios para la transmisión de las señales eléctricas generadas por los diversos elementos detectores (9) hasta 25 los órganos operativos de la torreta (21) , contando a tal efecto el eje (8) de rotación con una junta electrizada que permite ambas funciones de la alimentación eléctrica de los elementos detectores (9) y de transmisión de las señales generadas por estos últimos hasta medios de control; 30
medios de evaluación y control de las señales generadas por los mencionados detectores (9) para determinar a partir de las señales recibidas, un perímetro real de una base de sustentación, y para la evaluación de los momentos de vuelco (Mv1, Mv2, Mv3, Mv4) con respecto a 35 cada uno de los lados del recinto delimitado por dicho perímetro (10) ; y medios para evaluación de la posición del centro de gravedad (G) de la máquina (1) con respecto al mencionado recinto (10) de estabilidad. 5
2. Sistema según la reivindicación 1, en el que dichos sensores encargados de generar señales para la determinación del perímetro (10) respecto al que se calculan los momentos de vuelco consisten esencialmente en 10 células de carga (9a) y/o bandas extensiométricas (9b) distribuidas por zonas de la máquina (1) sensibles a los esfuerzos y deformaciones tal como entre los soportes (23) de cada uno de los rodillos que soportan las cadenas de (2) desplazamiento de la máquina y el travesaño (24) de la viga 15 de soporte en el caso de las células de carga (9a) , y/o en posiciones distribuidas a lo largo de los travesaños (25) en los que se ubican los mencionados soportes (23) de los rodillos de cada lateral de la máquina (1) en el caso de las bandas extensiométricas (9b) . 20
3. Sistema según las reivindicaciones 1 y 2, en el que los medios de transferencia de señales entre los elementos detectores (9) y los órganos de control ubicados en la torreta (21) y/o los medios de alimentación eléctrica 25 de dichos elementos detectores, pueden estar implementados alternativamente por dispositivos inalámbricos.
4. Sistema según las reivindicaciones 1 a 3, en el que el perímetro (10) que delimita la base real de 30 sustentación de la máquina (1) se establece tomando en consideración únicamente las señales generadas por los detectores (9) que en cada momento están sometidos a carga real, y siendo desechados los detectores (9.1) que en cada momento no estén sometidos a una carga real. 35
5. Método para la determinación de riesgo de vuelco (11) en maquinaria pesada, que comprende las etapas de:
medir (12) en tiempo real el valor de los esfuerzos en los apoyos de la máquina por medio de los detectores (9) 5 sometidos a carga;
determinar (13) el perímetro (10) del recinto de apoyo a partir de los valores medidos en la etapa (12) ;
calcular (14) el valor de los momentos de vuelco M (Mv1, Mv2, Mv3, Mv4) a partir de los valores medidos en la 10 etapa (12) y del perímetro determinado en la etapa (13) precedentes;
comparar (15) el momento M (Mv1, Mv2, Mv3, Mv4) calculado en la etapa (14) de cálculo, con un coeficiente de seguridad (CS) predefinido a efectos de determinar si el 15 momento M (Mv1, Mv2, Mv3, Mv4) es mayor o menor que dicho coeficiente de seguridad (CS) ;
en caso de que el resultado de la comparación de la etapa precedente sea menor que el valor del coeficiente de seguridad (CS) , determinar (15) que no hay riesgo de 20 vuelco;
si, por el contrario, el resultado de la comparación (15) es un valor mayor que el de dicho coeficiente de seguridad (CS) , determinar en la etapa (17) si el momento M (Mv1, Mv2, Mv3 o Mv4) que supera el valor del dicho 25 coeficiente de seguridad (CS) es el calculado con respecto al borde (L) de la zona de apoyo ZA opuesto a la extensión del brazo (BR) y del cazo (CZ) ;
si el resultado de la etapa (17) es negativo, determinar que existe riesgo real inminente de vuelco y 30 generar (18) las alarmas pertinentes.
si el resultado de la etapa (17) es afirmativo, en la etapa (19) calcular a partir de las fuerzas gravitatorias el momento Mg y comparar con un coeficiente de seguridad (CSG) predefinido a efectos de determinar si el momento Mg 35 es mayor o menor que dicho coeficiente de seguridad.
si el resultado de la etapa (19) es un valor menor que (CSG) , comunicar dicho valor a la etapa (16) para la determinación de ausencia de riesgo inminente de vuelco;
si, por el contrario, el resultado de la etapa (19) de 5 es un valor mayor que (CSG) , determinar que existe riesgo real inminente de vuelco y generar (18) las alarmas pertinentes.
Patentes similares o relacionadas:
Un panel de control y receptáculo para un equipo de movimiento de tierra, del 23 de Octubre de 2019, de Leica Geosystems Technology A/S: Un panel de control (C) y un receptáculo (R) adaptado para su uso en equipos de movimiento de tierra, en el que el panel de control (C) - […]
Disposición de enganche de una máquina de trabajo, del 28 de Febrero de 2019, de J.C. BAMFORD EXCAVATORS LTD.: Máquina de trabajo , que comprende: un brazo de trabajo , en la que el brazo de trabajo comprende una pluma y un brazo de balancín ; una […]
Método para colocar al menos un conducto/cable de comunicación, en un área, por debajo de la superficie de una carretera, del 27 de Febrero de 2019, de DellCron Innovation AB: Método para instalar una pluralidad de conductos/cables en un área para construir una red de distribución y/o una red de acceso; comprendiendo dicha área una primera capa […]
Un sistema que comprende un medio de unión de implemento y un implemento, del 9 de Enero de 2019, de OILQUICK AB: Un sistema que comprende un medio de unión de implemento adaptado para ser instalado en una máquina de trabajo, y que comprende además […]
Sistema de unión segura entre una herramienta y un brazo de una máquina de obras públicas, del 20 de Julio de 2016, de ATELIERS DE CONSTRUCTIONS DU BEAUJOLAIS: Sistema de unión segura para un conjunto de sujeción rápida que comprende un dispositivo de conexión fijado sobre una herramienta […]
Procedimiento de control de la energía de impacto de un pistón percutor de un aparato de percusión, del 20 de Abril de 2016, de MONTABERT: Procedimiento de control de la energía de impacto de un pistón percutor de un aparato de percusión movido por un fluido incompresible bajo […]
 SISTEMA Y MÉTODO PARA CONTROL DE ESTABILIDAD EN MAQUINARIA PESADA, del 21 de Mayo de 2015, de EMPRESA DE TRANSFORMACION AGRARIA, S.A. (TRAGSA): Un sistema de control de estabilidad en maquinaria pesada del tipo que incluye cadenas u orugas para desplazarse, basado en evaluación de riesgo de vuelco asociado a su […]
SISTEMA Y MÉTODO PARA CONTROL DE ESTABILIDAD EN MAQUINARIA PESADA, del 21 de Mayo de 2015, de EMPRESA DE TRANSFORMACION AGRARIA, S.A. (TRAGSA): Un sistema de control de estabilidad en maquinaria pesada del tipo que incluye cadenas u orugas para desplazarse, basado en evaluación de riesgo de vuelco asociado a su […]
 MAQUINA MOTORIZADA PROVISTA DE BLOQUEO DE TRACCION CON SELECTOR DE RANGOS DE VELOCIDADES, del 6 de Julio de 2009, de CLARK EQUIPMENT COMPANY: Máquina motorizada provista de un sistema de accionamiento , un selector de rango de velocidades acoplado al sistema de accionamiento y adaptado para hacer […]
MAQUINA MOTORIZADA PROVISTA DE BLOQUEO DE TRACCION CON SELECTOR DE RANGOS DE VELOCIDADES, del 6 de Julio de 2009, de CLARK EQUIPMENT COMPANY: Máquina motorizada provista de un sistema de accionamiento , un selector de rango de velocidades acoplado al sistema de accionamiento y adaptado para hacer […]