SENSOR ÓPTICO, SISTEMA, Y PROCEDIMIENTO PARA DETECTAR LA PRESENCIA DE HIELO EN SUPERFICIES.
Sensor óptico, sistema, y procedimiento para detectar la presencia de hielo en superficies.
La invención se refiere a un sensor óptico para detectar la presencia de hielo en superficies, caracterizado porque comprende una guía de ondas con un revestimiento óptico cuyo índice de refracción cumple la relación nagua
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330658.
Solicitante: UNIVERSITAT ROVIRA I VIRGILI.
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ GARCIA,JAVIER, DIAZ GONZALEZ,FRANCESC, RÓDENAS SEGUÍ,Airán, TRAVERIA BONDI,Miquel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D15/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › B64D 15/00 Descongelación o prevención de la formación de hielo en las superficies externas de aeronaves (vehículos a motor especialmente adaptados para el transporte de equipamiento de deshielo B60P). › Medios para detectar la formación de hielo o para iniciar la descongelación.
Fragmento de la descripción:
Sensor óptico, sistema, y procedimiento para detectar la presencia de hielo en superficies La presente invención se refiere a un sensor óptico para detectar la presencia de hielo en superficies.
También se refiere a un sistema para detectar la presencia de hielo que comprende al menos uno de dichos sensores, y a un procedimiento para detectar la presencia de hielo en superficies.
ESTADO DE LA TÉCNICA ANTERIOR
Existen varias aplicaciones en las que es necesario detectar la formación de hielo o la presencia de hielo sobre una superficie.
Por ejemplo, la presencia de hielo en cualquier elemento aerodinámico de un avión o un helicóptero altera la forma, el peso y la distribución de masas del mismo: cuando se inicia la formación de hielo, generalmente en un borde de ataque, se produce una distorsión de flujo laminar y se generan turbulencias, de modo que se incrementa la resistencia y disminuye la sustentación. La formación de hielo supone por tanto un riesgo para la seguridad, y de hecho ha tenido un papel importante en accidentes de aviación, y además afecta el control de la aeronave y hace aumentar el consumo de combustible.
Otro campo en el que conviene controlar la formación de hielo en una superficie es por ejemplo el de los aerogeneradores, ya que la formación de hielo en las palas reduce el rendimiento, puede provocar cargas excesivas, etc. También en buques, estructuras navales y otras aplicaciones submarinas en las cuales puede ser conveniente detectar la formación de hielo. También puede ser útil detectar la presencia o la ausencia de hielo en frigoríficos, cámaras frigoríficas y similares,
o en conducciones de agua.
Para abordar este problema se han propuesto distintos tipos de sensores ópticos, por ejemplo sensores que comprenden una fibra óptica a lo largo de la cual se propaga una onda electromagnética, configurados y montados de modo que la propagación de la onda se vea afectada en alguna medida, por fenómenos de reflexión, refracción y dispersión de la luz (scattering) , por la presencia de agua o hielo.
Sin embargo, los sensores ópticos conocidos tienen diferentes limitaciones que hacen que su aplicación no sea del todo satisfactoria y fiable: algunos sensores conocidos en general no son capaces de discriminar entre la presencia de hielo y la presencia de agua, por lo que en la práctica para saber si se forma hielo se requieren sensores adicionales de temperatura o de otro tipo; algunos sensores requieren elementos que sobresalen de la superficie, con lo que afectan la aerodinámica de la misma, o se pueden instalar sólo en determinadas posiciones y por tanto no miden directamente en la zona de interés; en otros casos las características de los sensores hacen que no sean resistentes a la erosión.
La presente invención proporciona un sensor que resuelve al menos en parte las limitaciones de los sensores conocidos.
EXPLICACIÓN DE LA INVENCIÓN
De acuerdo con un primer aspecto, la presente invención proporciona un sensor óptico para detectar la presencia de hielo en superficies, que se caracteriza porque comprende:
-una guía de ondas con un material de revestimiento óptico cuyo índice de refracción nmaterial cumple la relación nagua ≤ nmaterial < nhielo a una longitud de onda de trabajo λT para la cual nagua < nhielo , y con una zona de núcleo contenida en el material de revestimiento y apropiada para la propagación de una señal óptica que tiene la longitud de onda de trabajo, presentando la guía de ondas un tramo sensor apropiado para ser instalado en una superficie en la que se debe detectar la presencia de hielo de modo que una cara del material de revestimiento del tramo sensor quede expuesta ;
-medios para inyectar en la guía de ondas una señal óptica con una longitud de onda de trabajo λT para la cual nagua < nhielo ; y
-medios para detectar la señal óptica transmitida por la guía de ondas curso abajo de dicho tramo sensor.
Con estas características del sensor, la atenuación de la señal óptica a lo largo del tramo de la guía de ondas que está próxima a la cara expuesta del cuerpo es significativamente diferente si hay presencia de hielo sobre la superficie, y por tanto sobre la cara expuesta del cuerpo, o si hay únicamente presencia de aire o agua. A continuación se explica con más detalle de qué manera el sensor permite detectar hielo de modo fiable, y más particularmente diferenciar entre la presencia de hielo y la presencia de agua.
En la propagación de la señal óptica a lo largo de la guía de ondas, existen uno o varios modos electromagnéticos guiados.
En la cara del tramo sensor que está expuesta, es decir, sobre la que se puede depositar agua o hielo, hay un salto en el índice de refracción: si el índice de refracción del medio exterior es mayor que el de la guía, puede surgir un acoplamiento evanescente entre los modos electromagnéticos guiados y el medio exterior, que se traduce en una pérdida de potencia de los modos guiados.
Debido a que la guía de ondas es apropiada para trabajar en la región espectral donde se cumple la condición nagua ≤ nmaterial < nhielo, en presencia de hielo habrá acoplamiento evanescente y se producirá la pérdida de señal óptica, mientras que en presencia de agua o aire no lo hará, ya que sólo en presencia de hielo hay un aumento del índice de refracción entre el material y el exterior.
En realizaciones de la invención se aprovechan estos fenómenos para la detección unívoca del hielo frente al agua, de manera eficiente y sin necesidad de ulteriores parámetros. Además el sensor se puede montar sin necesidad de que sobresalga de la superficie, por lo que es particularmente apropiado en aplicaciones en que es importante no afectar la aerodinámica de las superficies, y la zona de núcleo de la guía de ondas queda protegida de la erosión porque no está expuesta directamente.
Preferiblemente, el índice de refracción del material cumple la relación nagua < nmaterial < nhielo a la longitud de onda de trabajo λT.
En algunas realizaciones, especialmente cuando la aerodinámica de la superficie es importante, el tramo sensor es apropiado para ser instalado en la superficie de modo que la cara del material de revestimiento del tramo sensor quede expuesta a través de una abertura en la superficie; de este modo el sensor se puede montar nivelado con la superficie, y no afecta sus características aerodinámicas.
La guía de ondas puede comprender una fibra óptica, de la cual se ha retirado el recubrimiento exterior al menos en el área del tramo sensor destinada a quedar expuesta durante el uso, y opcionalmente se ha retirado además una parte del espesor del revestimiento óptico.
Alternativamente, al menos en el tramo sensor de la guía de ondas la zona de núcleo puede estar fabricada dentro de un cuerpo de material apropiado, de modo que varíe en esta zona el índice de refracción; es decir, el resto de la guía de ondas a ambos lados del tramo sensor puede estar configurado de otro modo.
Por ejemplo, a un extremo de entrada y a un extremo de salida de la guía de ondas que incluye el tramo sensor pueden estar acopladas unas fibras ópticas. Esto permite situar el emisor y el detector a cualquier distancia del tramo sensor, y siguiendo cualquier camino, gracias a la flexibilidad de la fibra óptica, cosa que puede ser particularmente útil en aplicaciones en las que conviene minimizar el espacio ocupado por el sistema en la superficie, como puede ser por ejemplo el ala de un avión.
En algunas realizaciones concretas, la longitud de onda de trabajo es de entre 3000 y 5000 nm, preferiblemente entre 3200 y 4000 nm; y el material se puede seleccionar entre cuarzo cristalino, cuarzo vítreo, fluoruro de indio, o compuestos de los mismos.
En realizaciones de la invención el espesor entre la zona de núcleo y la cara del material de revestimiento destinada a quedar expuesta es inferior a 250 μm, preferiblemente inferior a 50 μm; estos rangos permiten que los sensores tengan dimensiones reducidas.
El sensor puede comprender además un recubrimiento anti-erosión aplicado sobre la cara del material de revestimiento del tramo sensor destinada a quedar expuesta. Este recubrimiento permite alargar la vida útil del sensor, y será adecuado sobre todo en condiciones en que la superficie esté sometida a fricciones elevadas o ambientes particularmente agresivos.
De acuerdo con un segundo aspecto, la invención también se refiere a un sistema para detectar la presencia de hielo en superficies que comprende al menos un sensor óptico como se ha descrito, y medios para comparar la intensidad...
Reivindicaciones:
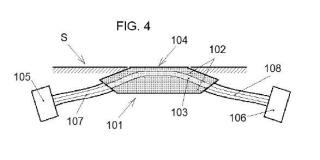
1. Sensor óptico (100) para detectar la presencia de hielo en superficies, caracterizado porque comprende:
-una guía de ondas (101; 201) con un material de revestimiento óptico (102; 202) cuyo índice de refracción nmaterial cumple la relación nagua ≤ nmaterial < nhielo a una longitud de onda de trabajo λT para la cual nagua < nhielo , y con una zona de núcleo (103; 203) contenida en el material de revestimiento (102; 202) y apropiada para la propagación de una señal óptica que tiene la longitud de onda de trabajo, presentando la guía de ondas (101; 201) un tramo sensor (104; 204) apropiado para ser instalado en una superficie (S) en la que se debe detectar la presencia de hielo de modo que una cara del material de revestimiento (102; 202) del tramo sensor (104; 204) quede expuesta ;
-medios (105) para inyectar en la guía de ondas (101; 201) una señal óptica con una longitud de onda de trabajo λT para la cual nagua < nhielo ; y
-medios (106) para detectar la señal óptica transmitida por la guía de ondas (101; 201) curso abajo de dicho tramo sensor (104; 204) .
2. Sensor óptico según la reivindicación 1, caracterizado porque el índice de refracción del material cumple la relación nagua < nmaterial < nhielo a la longitud de onda de trabajo λT.
3. Sensor óptico según una cualquiera de las reivindicaciones 1 ó 2, caracterizado porque el tramo sensor (104; 204) es apropiado para ser instalado en la superficie (S) de modo que la cara del material de revestimiento (102; 202) del tramo sensor (104; 204) quede expuesta a través de una abertura (A) en la superficie (S) .
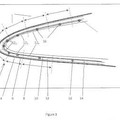
4. Sensor óptico según una cualquiera de las reivindicaciones 1 a 3, caracterizado porque la guía de ondas comprende una fibra óptica (201) , de la cual se ha retirado el recubrimiento exterior
(209) al menos en el área del tramo sensor (204) destinada a quedar expuesta durante el uso.
5. Sensor óptico según la reivindicación 4, caracterizado porque en el tramo sensor (204) de la fibra óptica (201) se ha retirado además una parte del espesor del revestimiento óptico (202) .
6. Sensor óptico según una cualquiera de las reivindicaciones 1 a 3, caracterizado porque en al menos el tramo sensor (104) de la guía de ondas (101) la zona de núcleo (103) está fabricada dentro de un cuerpo de material (102) apropiado, de modo que varíe en esta zona el índice de refracción.
7. Sensor óptico según la reivindicación 6, caracterizado porque a un extremo de entrada y a un extremo de salida de dicha guía de ondas (101) que incluye el tramo sensor (104) están acopladas además fibras ópticas (107, 108) .
8. Sensor óptico según una cualquiera de las reivindicaciones anteriores, caracterizado porque la longitud de onda de trabajo λT es de entre 3000 y 5000 nm, preferiblemente entre 3200 y 4000 nm.
9. Sensor óptico según una cualquiera de las reivindicaciones anteriores, caracterizado porque el material se selecciona entre cuarzo cristalino, cuarzo vítreo, fluoruro de indio, o compuestos de los mismos.
10. Sensor óptico según una cualquiera de las reivindicaciones anteriores, caracterizado porque el espesor (e) entre la zona de núcleo (103; 203) y la cara del material de revestimiento (102; 202) destinada a quedar expuesta es inferior a 250 μm, preferiblemente inferior a 50 μm.
11. Sensor óptico según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además un recubrimiento anti-erosión aplicado sobre la cara del material de revestimiento (102; 202) del tramo sensor (104; 204) destinada a quedar expuesta.
12. Sistema para detectar la presencia de hielo en superficies, caracterizado porque comprende al menos un sensor óptico (100) según una cualquiera de las reivindicaciones 1 a 9, y medios para comparar la intensidad de una señal óptica detectada con al menos un valor umbral, y generar una alarma en caso de que la señal óptica sea inferior a un valor umbral.
13. Sistema según la reivindicación 12, caracterizado porque comprende medios de calibración para determinar al menos un valor umbral.
14. Sistema según la reivindicación 13, caracterizado porque los medios de calibración son apropiados para determinar al menos un valor umbral una vez que el sistema está instalado en una superficie (S) .
15. Sistema según una cualquiera de las reivindicaciones 12 a 14, caracterizado porque comprende una pluralidad de dichos sensores ópticos (100) , destinados a ser instalados en una zona predeterminada, a distancia unos de otros, y una unidad de control común conectada a dicha pluralidad de sensores (100) , comprendiendo dicha unidad de control medios para proporcionar información sobre la distribución de hielo en una zona predeterminada, en función de las intensidades de las señales ópticas detectadas en las salidas de la pluralidad de sensores (100) .
16. Procedimiento para detectar la presencia de hielo en superficies, caracterizado porque comprende:
-seleccionar una longitud de onda de trabajo λT para la cual nagua < nhielo
-proporcionar una guía de ondas (101; 201) que comprende un material de revestimiento óptico (102; 202) cuyo índice de refracción nmaterial cumple la relación nagua ≤ nmaterial < nhielo a la longitud de onda de trabajo λT y una zona de núcleo (103; 203) contenida en el material de revestimiento y apropiada para la propagación de una señal óptica que tiene la longitud de onda de trabajo;
-instalar la guía de ondas (101; 201) en una superficie (S) en la que se debe detectar la presencia de hielo, de tal modo que en un tramo de la guía una cara del material de revestimiento (102; 202) quede expuesta, definiendo un tramo sensor (104; 204) de la guía;
-transmitir una señal óptica con una longitud de onda de trabajo λT a lo largo de la guía de ondas (101; 201) , y
-detectar la señal óptica curso abajo del tramo sensor (104; 204) .
17. Procedimiento según la reivindicación 16, caracterizado porque se proporciona una guía de ondas (101; 201) que comprende un material de revestimiento óptico (102; 202) cuyo índice de refracción nmaterial cumple la relación nagua < nmaterial < nhielo a la longitud de onda de trabajo λT.
18. Procedimiento según una cualquiera de las reivindicaciones 16 ó 17, caracterizado porque se instala la guía de ondas (101; 201) en la superficie (S) de modo que la cara del material de revestimiento (102; 202) del tramo sensor (104; 204) quede expuesta a través de una abertura (A) en la superficie (S) .
19. Procedimiento según la reivindicación 18, caracterizado porque el tramo sensor (104; 204) de la guía de ondas (101; 201) se instala en la superficie (S) de modo que la cara del material de revestimiento (102; 202) expuesta quede nivelada con la superficie (S) .
20. Procedimiento según una cualquiera de las reivindicaciones 16 a 19, caracterizado porque comprende además:
-comparar la intensidad de la señal detectada con al menos un valor umbral, y
-determinar que hay presencia de hielo sobre el tramo sensor (104; 204) de la guía de ondas (101; 201) si la intensidad de la señal detectada es inferior a dicho valor umbral.
21. Procedimiento según la reivindicación 20, caracterizado porque comprende además determinar al menos un valor umbral.
22. Procedimiento según la reivindicación 21, caracterizado porque la determinación de al menos un valor umbral se realiza una vez que la guía de ondas (101; 201) está instalada en una superficie (S) .
23. Procedimiento según una cualquiera de las reivindicaciones 16 a 22, caracterizado porque comprende:
-instalar una pluralidad de guías de ondas (101; 201) en una zona predeterminada, a distancia unas de otras,
-proporcionar una unidad de control común conectada a dicha pluralidad de guías de ondas (101; 201) , y
-proporcionar información mediante la unidad de control sobre la distribución de hielo en la zona predeterminada, en función de las intensidades de las señales ópticas detectadas.
Patentes similares o relacionadas:
Revestimiento de deshielo multicapa para plataformas de avión, del 9 de Octubre de 2019, de Sunlight Aerospace Inc: Una estructura resistente al hielo, que comprende: - una plataforma estructural autoportante; - una capa protectora de retención dispuesta sobre […]
Sonda para detectar la formación de hielo y detector de la formación de hielo con la misma, del 20 de Septiembre de 2017, de Commercial Aircraft Corporation Of China Ltd: Una sonda para la detección de hielo, que comprende tres segmentos proporcionados uno por vez en una dirección del flujo de aire (i), caracterizada porque una […]
Procedimiento para el funcionamiento de una planta de energía eólica y planta de energía eólica para la ejecución del procedimiento, del 22 de Marzo de 2017, de NORDEX ENERGY GMBH: Procedimiento para el funcionamiento de una planta de energía eólica que presenta un rotor con al menos una pala de rotor que barre una superficie […]
DISPOSITIVO PARA LA DETECCIÓN A DISTANCIA DE ELEMENTOS SOBRE UNA SUPERFICIE, del 23 de Agosto de 2016, de UNIVERSIDAD DE CASTILLA-LA MANCHA: Dispositivo para detectar la presencia de elementos sobre una superficie cualquiera. Comprende un sensor de medida de radiación infrarroja, conectado […]
 Dispositivo para registrar estados críticos de una superficie, del 21 de Enero de 2016, de Moser, Michael: Dispositivo (100, 100''') para el registro de estados críticos sobre una superficie de un elemento constructivo , caracterizado por una placa portadora al menos parcialmente […]
Dispositivo para registrar estados críticos de una superficie, del 21 de Enero de 2016, de Moser, Michael: Dispositivo (100, 100''') para el registro de estados críticos sobre una superficie de un elemento constructivo , caracterizado por una placa portadora al menos parcialmente […]
 SENSOR ÓPTICO, SISTEMA, Y PROCEDIMIENTO PARA DETECTAR LA PRESENCIA DE HIELO EN SUPERFICIES, del 13 de Noviembre de 2014, de UNIVERSITAT ROVIRA I VIRGILI: La invención se refiere a un sensor óptico para detectar la presencia de hielo en superficies, caracterizado porque comprende una guía de […]
SENSOR ÓPTICO, SISTEMA, Y PROCEDIMIENTO PARA DETECTAR LA PRESENCIA DE HIELO EN SUPERFICIES, del 13 de Noviembre de 2014, de UNIVERSITAT ROVIRA I VIRGILI: La invención se refiere a un sensor óptico para detectar la presencia de hielo en superficies, caracterizado porque comprende una guía de […]
 Mejoras en relación con monitorización de temperatura, del 29 de Mayo de 2012, de BAE SYSTEMS PLC: Método de monitorización de temperatura para un aparato de protección frente al hielo electrotérmico de una aeronave, en el que el aparato incluye una pluralidad de elementos […]
Mejoras en relación con monitorización de temperatura, del 29 de Mayo de 2012, de BAE SYSTEMS PLC: Método de monitorización de temperatura para un aparato de protección frente al hielo electrotérmico de una aeronave, en el que el aparato incluye una pluralidad de elementos […]
PROCEDIMIENTO Y SISTEMA PARA DETECTAR EL RIESGO DE LA FORMACIÓN DE HIELO EN LAS SUPERFICIES AERODINÁMICAS, del 10 de Febrero de 2012, de S.I.SV.EL. S.p.A. Societa' Italiana Per Lo Sviluppo, Dell' Elettronica: Procedimiento para la detección del riesgo de la formación de hielo en superficies aerodinámicas (5S) envueltas por un flujo de fluido (F), tal como superficies […]