Establecimiento de la posición angular de un rotor.
Procedimiento para establecer la posición angular de un rotor de un motor (1),
en donde se une al menos un imán (2) indirecta o directamente a un eje de motor (3), en donde se dispone al menos una memoria (4) sensible magnéticamente con varias celdas de memoria (5), de tal manera que al menos algunas de las celdas de memoria (5) son magnetizadas por el imán (2), en donde se leen las celdas de memoria (5) y en donde se establece la posición angular a partir de una posición geométrica de las celdas (5) magnetizadas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/073539.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: NOLTE, UWE, KRAUSE,UWE, GUTZMER,MARCUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
PDF original: ES-2530059_T3.pdf
Fragmento de la descripción:
Establecimiento de la posición angular de un rotor
La Invención se refiere a un procedimiento para establecer la posición angular de un rotor de un motor, a un transmisor de posición angular ya un motor.
La activación electrónica de motores y/o de una carga exige con frecuencia el conocimiento de una posición. En especial en aplicaciones multi-turn (es decir, en las que el motor realiza varias revoluciones entre las posiciones extremas), es muy interesante saber en qué posición absolutase encuentra uno.
La detección de la posición para aplicaciones single-turn ya se ha resuelto de las formas más diversas, como por ejemplo mediante:
- transmisores increméntales (también con traza indicadora),
- transmisores de valor absoluto ópticos (n trazas producen una resolución angular de 2An),
- resolutores,
- detección magnética, p.ej. mediante efecto Hall o GMR (Giant MagnetoResistance),
- procedimientos capacitivos y
- procedimientos resistivos.
Con excepción de los dos primeros procedimientos, todos los otros trabajan sobre base analógica y preparan la señal de medición mediante convertidores AD para el tratamiento subsiguiente.
En las aplicaciones multi-turn existe la posibilidad de almacenar el número de revoluciones, ya sea mecánicamente (p.ej. mediante engranajes) o eléctricamente (p.ej. en una memoria no volátil).
La invención se ha impuesto la tarea de indicar una solución sencilla para establecer la posición angular.
Esta tarea es resuelta mediante un procedimiento para establecer la posición angular de un rotor de un motor, en donde al menos un imán está unido indirecta o directamente a un eje de motor, en donde al menos una memoria sensible magnéticamente con varias celdas de memoria está dispuesta de tal modo, que al menos una de las celdas de memoria se magnetiza mediante unos imanes, en donde las celdas de memoria se leen yen donde la posición 25 anguiarse establece a partir de una posición geométrica de las celdas magnetizadas.
La invención es resuelta además mediante un transmisor de posición angular y un motor con las particularidades indicadas en las reivindicaciones 6 y 11.
La detección de la posición para aplicaciones single-tum puede realizarse conforme a la invención magnéticamente de forma directamente digital, por medio de que se lea una memoria digital sobre base magnética (por ejemplo 3 MRAM, Magnetoresistive Random Access Memory), que es sensible a campos magnéticos externos. La posición angular puede establecerse asi de fomna bástente sencilla, ya que la posición geométrica de las celdas magnetizadas permite una deducción directa de la posición angular del imán (y de este modo de la posición angular del rotor, ya que el imán está unido al eje de motor). Con ello el imán puede estar ejecutado de forma diferente, p.ej. como imán de barra sencillo o también como imán multi-polo, y es decisiva la posibilidad de deducir 1a posición 35 angular a partir del "modelo magnético" en las celdas de memoria magnetizadas. La posición geométrica de tes celdas magnetizadas en la memoria (chip) es entonces una medida directa de la posición del rotor.
La solución propuesta trabaja sin convertidor AD y envía directamente una señal de medición sobre base digitel. De este modo se ahorra la correspondiente técnica de conmutación analógica, incluyendo todos los problemas correspondientes (como por ejemplo errores de ajuste, compensación y temperatura así como sensibilidad EMV y 4 climática).
En una forma ventajosa de la configuración se utiliza para establecer la posición angular al menos un método estadístico. Por medio de esto - por ejemplo mediante una formación geométrica del valor medio - puede aumentarse la precisión a la hora de determinar la posición angular.
En otra forma de ejecución ventajosa el imán se magnetiza céntricamente y se dispone excéntricamente respecto al eje de motor. Esta variante hace posible una valoración especialmente sencilla, ya que en una rotación del eje de motor a las celdas de memoria correspondientes a la magnetización interna del imán de la memoria sensible magnéticamente se aplica la magnetización exterior, y la posición angular del rotor se obtiene casi de la posición (x/y) de las celdas de memoria correspondientes a la magnetización interna.
En otra forma de ejecución ventajosa se archiva una cantidad de revoluciones en una memoria no volátil. De este modo la invención puede usarse también para aplicaciones multi-turn, en donde la posición puede archivarse de forma duradera más allá de una caída de tensión.
En otra forma de ejecución ventajosa se utiliza con ello como memoria no volátil la memoria sensible magnéticamente y la cantidad se archiva en al menos una celda de memoria, que no es magnetizada por el imán. De este modo se hace posible sin complejidad adicional, en comparación con un transmisor angular single-turn, un transmisor multi-tum con archivo duradero de la posición para aplicaciones multi-turn, en donde se usan las zonas (de memoria) en el chip sensible magnéticamente (de la memoria), en las que no influye el campo magnético a detectar del imán.
En otra forma de ejecución ventajosa al menos una celda de memoria es apantallada de tal modo por el imán, que ésta no es magnetizada por éste. Por medio de esto la memoria sensible magnéticamente puede usarse también cuando no queda ninguna zona por influenciarse a causa de la disposición / las dimensiones del imán y de la memoria.
A continuación se describe y explica con más detalle la invención, con base en los ejemplos de ejecución representados en las figuras. Aquí muestran:
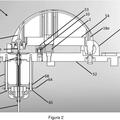
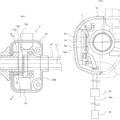
la figura 1 una representación esquemática de un motor conforme a la invención, la figura 2 una representación de las celdas de memoria magnetizadas.
La figura 1 muestra un motor 1 conforme a la invención con un transmisor de posición angular conforme a la invención, que presenta al menos un imán 2, una memoria 4 sensible magnéticamente, una unidad de lectura 6 y una unidad de valoración 7. El imán 2 está aplicado al eje de motor 3 y de este modo efectúa también sus rotaciones. De forma correspondiente a la posición respectiva del imán 2 se magnetizan las celdas de memoria 5 (véase la figura 2) de la memoria 4, que puede estar ejecutada por ejemplo como MRAM. En el caso de un imán 2 sencillo con un polo norte y otro sur se magnetizan N por lo tanto aproximadamente la mitad (conforme a la disposición representada) de las celdas de memoria 5 y la otra mitad se magnetiza S.
Las celdas de memoria 5 se leen mediante una unidad de lectura 6. Con base en su magnetización (norte/sur) y la posición geométrica de las celdas magnetizadas sobre el chip 4, la unidad de valoración 7 establece la posición angular del imán 2 y, de este modo, también la del rotor. La unidad de valoración 7 puede formar parte con ello de una placa de circuito impreso 8 dado el caso existente, que puede estar dispuesta en una tapa de motor 9 como se ha representado en la figura.
En lugar de un imán 2 sencillo puede utilizarse también un imán multi-polar, por ejemplo con 4 polos, que después se aplica ventajosamente des céntricamente con relación al eje de rotor 3, de tal modo que el "modelo magnético" sobre el chip 4 permite una deducción clara de la posición angular del rotor. También es posible una ejecución con dos más imanes más pequeños, con los que puede crearse también un "modelo" claro. También es posible naturalmente la utilización de varias memorias magnéticas (más pequeñas). En una variante especialmente ventajosa se dispone un imán magnetizado céntricamente (anulamnente) excéntricamente respecto al eje de motor 3, de tal modo que durante una rotación del eje de motor 3 a las celdas de memoria 5 correspondientes a la magnetización interna del imán se aplica la magnetización externa y puede deducirse así prácticamente, a partir de la posición (x/y) de las celdas de memoria 5 correspondientes a la magnetización interna sobre la memoria 4 sensible magnéticamente, la posición angular del rotor.
Mediante la solución conforme a la invención se usa exactamente en este campo un módulo (la memoria 4) que no se ha desarrollado para este campo (establecimiento de la posición angular) y que muestra unas sensibilidades indeseadas para la aplicación original (archivo de datos), para con ello usar de forma ventajosa la sensibilidad. Con ello la invención trabaja sin convertidor AD y envía una señal de medición directamente sobre base digital, con lo que se ahorra la correspondiente técnica de conmutación analógica, incluyendo todos los problemas correspondientes.
La figura 2 muestra... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para establecer la posición angular de un rotor de un motor (1), en donde se une al menos un imán (2) indirecta o directamente a un eje de motor (3), en donde se dispone al menos una memoria (4) sensible magnéticamente con varias celdas de memoria (5), de tal manera que al menos algunas de las celdas de memoria (5) son magnetizadas por el imán (2), en donde se leen las celdas de memoria (5) y en donde se establece la posición anguiara partir de una posición geométrica de las celdas (5) magnetizadas.
2. Procedimiento según la reivindicación 1, en donde se utiliza para establecer la posición angular al menos un método estadístico.
3. Procedimiento según la reivindicación 1 ó 2, en donde el imán se magnetiza céntricamente y se dispone excéntricamente respecto al eje de motor (3).
4. Procedimiento según una de las reivindicaciones anteriores, en donde se archiva una cantidad de revoluciones en una memoria no volátil.
5. Procedimiento según la reivindicación 4, en donde se utiliza con ello como memoria no volátil la memoria (4) sensible magnéticamente y la cantidad se archiva en al menos una celda de memoria (5), que no es magnetizada por el imán (2).
6. Procedimiento según la reivindicación 5, en donde al menos una celda de memoria (5) es apantallada de tal modo por el imán (2), que ésta no es magnetizada por éste
7. Transmisor de posición angular para establecer la posición angular de un rotor de un motor (1), con al menos un imán (2) que puede unirse indirecta o directamente a un eje de motor (3), con al menos una memoria (4) sensible magnéticamente con varias celdas de memoria (5) que pueden disponerse de tal modo, que al menos una de las celdas de memoria (5) se magnetiza mediante el imán (2), con una unidad de lectura (6) para leer las celdas de memoria (5) y con una unidad de valoración (7) para establecer la posición angular a partir de una posición geométrica de las celdas (5) magnetizadas.
8. Transmisor de posición angularsegún la reivindicación 7, en donde la unidad de valoración (7) para establecerla posición angular está configurada con base en al menos un método estadístico.
9 Transmisor de posición angular según la reivindicación 7 u 8, en donde en donde el imán se magnetiza céntricamente y se dispone excéntricamente respecto al eje de motor (3).
1. Transmisor de posición angularsegún una de las reivindicaciones 7 a 9, en donde se archiva una cantidad de revoluciones en una memoria no volátil.
11. Transmisor de posición angularsegún la reivindicación 1, en donde puede utilizarse como memoria no volátil la memoria (4) sensible magnéticamente y la cantidad puede archivarse en al menos una celda de memoria (5), que no puede magnetizarse por el imán (2).
12. Transmisor de posición angularsegún la reivindicación 11, en donde al menos una celda de memoria (5) puede apantanarse de tal modo por el imán (2), que ésta no puede magnetizarse por éste.
13. Motor(1) con un transmisor de posición angularsegún una de las reivindicaciones 7 a 12.
Patentes similares o relacionadas:
 Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Procedimiento para el monitoreo del transporte de recipientes de líquidos en un dispositivo de análisis automático, del 15 de Julio de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Procedimiento para el monitoreo del transporte de un recipiente de líquido con una pinza de sujeción pasiva fijada a un brazo de transferencia […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Sistemas y métodos de conmutación de salida para sensores de campo magnético, del 11 de Marzo de 2020, de INFINEON TECHNOLOGIES AG: Un sensor, que comprende: un elemento sensor; y una circuitería del sensor acoplada al elemento sensor, el elemento sensor configurado para detectar […]
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Recopilación y/o procesamiento de datos de múltiples sensores, del 4 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: detectar el movimiento de un dispositivo en respuesta a la recepción de una señal desde un acelerómetro […]