Sistema de medición de posición para la detección de una posición relevante de un elemento de guiado que se desplaza linealmente.
Sistema de medición de posición (1) para la detección de una posición relevante (xmin,
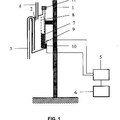
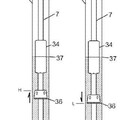
xmax) de una barra de guiado (3) extendida a lo largo de un camino rectilíneo (x) y que se desplaza a lo largo del camino rectilíneo (x), respecto a un sistema de guiado (2), con un número de elementos de contacto Reed (5) y con al menos un elemento magnético (7), en el que
•el elemento magnético (7) está adaptado a la formación de un campo magnético (H),
• el elemento magnético (7) está conectado con la barra de guiado (3),
• el o cada elemento de contacto Reed (5) está configurado respectivamente dentro de un rango de detección para la detección de un campo magnético (H), cuya intensidad de campo en el lugar del elemento de contacto Reed (5) es mayor que un valor umbral predefinido, y
• al menos un elemento de contacto Reed (5) está conectado con el sistema de guiado (2) y está dispuesto en un entorno (Ux) del camino (x),
en el que además está presente un sistema de medición inductivo para la determinación de posición de la barra de guiado (3), que presenta un número de bobinas de inducción eléctricas (9), y en el que está presente una disposición de circuitos (12) que comprende al menos una unidad de resistencia óhmica (R1, R2),
• que configura un circuito en serie (12) con al menos una de las bobinas de inducción (9), y
• que configura un bucle de circuito (14, 15) con al menos uno de los elementos de contacto Reed (5), en el que el bucle de circuito (14, 15) puentea y por consiguiente cortocircuita la unidad de resistencia óhmica (R1, R2) cuando se cierra el de contacto Reed (5).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/005349.
Solicitante: AREVA GmbH.
Nacionalidad solicitante: Alemania.
Dirección: PAUL-GOSSEN-STRASSE 100 91052 ERLANGEN ALEMANIA.
Inventor/es: REYMANN,MARKUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › mediante la variación de la inductancia, p. ej. mediante una armadura móvil.
- G01F23/74 G01 […] › G01F MEDIDA DEL VOLUMEN, FLUJO VOLUMETRICO, FLUJO MASICO O NIVEL DE LIQUIDOS; DOSIFICACION VOLUMETRICA. › G01F 23/00 Indicación o medida del nivel de líquidos o materiales sólidos fluyentes, p. ej. indicación en términos de volumen, indicación por medio de una señal de alarma. › para detectar cambios de nivel sólo en puntos discretos.
PDF original: ES-2457270_T3.pdf
Fragmento de la descripción:
Sistema de medición de posición para la detección de una posición relevante de un elemento de guiado que se desplaza linealmente La invención se refiere a un sistema de medición de posición para la detección de una posición relevante, en particular de una posición máxima y mínima, de un elemento de guiado que se desplaza linealmente.
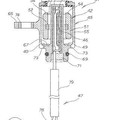
En una instalación nuclear, por ejemplo, en una central nuclear, se usan barras de control desplazables linealmente para controlar las reacciones en cadena de procesos de desintegración nuclear en un reactor, en los que se emite una radiación corpuscular, en particular radiación de neutrones, mediante la absorción de la radiación. Cuanto más se empujan tales barras de control, que típicamente están dispuestas empaquetadas en grupos, entre los elementos fisionables nucleares, se absorben fracciones tanto mayores de la radiación corpuscular que impulsa la reacción en cadena, de modo que la reacción en cadena se desarrolla correspondientemente más lentamente y en la posición extendida completa de las barras de control se puede paralizar de forma ideal. El estado y desarrollo de la reacción en cadena dependen por consiguiente de las posiciones extendidas de las barras de control desplazables linealmente y están determinados por éstas. Un conocimiento exacto de las posiciones de las barras de control, en particular de las respectivas posiciones extendidas máximas, es relevante por consiguiente para una regulación del estado de funcionamiento y por consiguiente en particular para la seguridad.
Los sistemas de medición para las barras de control comprenden en general dispositivos para la aplicación de procedimientos de medición inductivos electromagnéticamente, en los que se usa respectivamente que la modificación temporal de un campo magnético induce una tensión eléctrica en un conductor eléctrico. Un dispositivo semejante comprende habitualmente una o varias bobinas primarias para la facilitación de un campo magnético semejante. El campo magnético se modifica debido a una barra de control en la zona del campo magnético, lo que conduce a que se modifique la tensión inducida en las bobinas de inducción dispuestas a lo largo del recorrido de desplazamiento lineal. A partir de la magnitud de la tensión inducida se puede determinar la posición de la barra de control. Para la detección de la posición final inferior y/o la superior de la barra de control están adaptados la mayoría de las veces grupos separados de bobinas cuyas señales de medición se transmiten a través de líneas separadas respectivamente hacia la unidad de valoración. Una señal de tensión de estas bobinas da información acerca de si la barra de control ha alcanzado la posición final inferior o la superior.
Una desventaja del sistema de medición de posición arriba representado se basa en que para la detección de las posiciones de la barra de control es necesaria una multiplicidad de bobinas secundarias, cuyas líneas de señalización se deben sacar de la zona interior del reactor, el así denominado recipiente de contención. En particular las bobinas para la detección de las posiciones finales de la barra de control requieren líneas de medición adicionales. Además, es desventajoso que, en función de la posición real de la barra de control, la señal de tensión de la bobina de inducción varíe continuamente en el entorno de la posición extendida mínima o máxima en el lado final de la barra de control. Por consiguiente, mediante la magnitud de la señal de tensión se puede inferior de forma burda sobre la posición extendida mínima o máxima de la barra de control; pero la señal todavía está presente en forma atenuada cuando la barra de control ya no se sitúa en su posición extendida mínima o máxima, por ejemplo, luego cuando la barra de control se ha arrastrado un cierto tramo fuera del reactor. El procedimiento de medición inductivo con frecuencia es por ello demasiado inexacto para una detección precisa y unívoca de la posición final.
El objetivo de la invención es especificar un sistema de medición de posición para la detección de una posición relevante, en particular una posición extrema, de una barra de control que se desplaza a lo largo de un camino rectilíneo, para el que sea necesaria un número lo más bajo posible de líneas de medición y que sea lo más exacto y fiable posible. El sistema de medición de posición debería poderse integrar en particular de manera sencilla en sistemas de medición de posición inductivos existentes.
El objetivo se resuelve según la invención mediante las características de la reivindicación 1.
La invención parte de la reflexión de acoplar localmente un campo magnético con la barra de guiado con la ayuda de un elemento magnético y detectar, mediante una detección del campo magnético a través de un elemento de contacto Reed externo conectado de forma fija con el sistema de guiado, la posición correspondiente de la barra de guiado respecto al sistema de guiado. En particular se pueden detectar de esta manera los valores de posición discretos de la barra de guiado, por ejemplo, una posición extrema.
Como posición de la barra de guiado se define la situación de un punto de referencia estacionario respecto a la barra de guiado, teniendo el punto de referencia exactamente una coordenada local respecto al camino rectilíneo. El punto de referencia se selecciona en el lugar de la barra de guiado en el que está dispuesto un elemento magnético cualquiera, pero seleccionado de forma fija. En el caso de sólo un elemento magnético esta selección es unívoca. La selección especial mencionada en último término del punto de referencia no representa una limitación de la generalidad. Con otra selección del punto de referencia los valores de posición medidos se desplazan en comparación a los valores en la selección especial del punto de referencia en una longitud constante, que se da por la distancia entre el elemento magnético y el punto de referencia.
Además, la detección de la posición es unívoca dado que el elemento de contacto Reed reacciona detectando luego
y sólo luego cuando un campo magnético está en el rango de detección, cuya intensidad de campo en el lugar del elemento de contacto Reed es más grande que el valor umbral. En caso de una modificación de posición de la barra de guiado, que es mayor que la precisión de separación espacial del elemento de contacto Reed, no tiene lugar por consiguiente una señalización continua del elemento de contacto Reed. Mejor dicho se hace posible una información binaria fiable del tipo “se ha alcanzado la posición final: si / no?”.
Si varios elementos de contacto Reed están instalados en uno y el mismo sitio del sistema de guiado, entonces se aumenta correspondientemente el grado de redundancia de una detección de posición. Un sistema de medición de posición según la invención se puede realizar en principio con un grado de redundancia elevado y correspondientemente es seguro. Sin embargo, en este caso se debe contar debido al sistema con la desventaja de un número mayor de líneas.
Además, el sistema de medición de posición según la invención se puede combinar con sistemas conocidos para la medición de posición, en particular con sistemas para la aplicación de procedimientos de medición inductivos, pudiéndose recurrir en particular a líneas de señalización ya existentes (uso múltiple) .
El elemento magnético está configurado preferentemente como un imán permanente. Para un imán permanente no son necesarios, al contrario que en una bobina que forma un electroimán, conductores eléctricos que se deban sacar del recipiente de contención como líneas adicionales junto o en la barra de guiado. El número de líneas adicionales posibles que se deben sacar del recipiente de contención para el sistema de medición de posición queda limitado por consiguiente a los elementos sensores.
Convenientemente el elemento magnético está conectado con la barra de guiado en el lado final. En una posición semejante el elemento magnético se puede conectar de forma especialmente sencilla con la barra de guiado y puede estar incorporado, por ejemplo como imán permanente, sobre la barra de guiado en el lado final en forma de una placa magnética o un disco circular magnético. Además, por consiguiente se puede detectar la posición extrema de la barra de guiado por un elemento de contacto Reed en el lugar de una desviación extrema posible del lado final correspondiente de la barra de guiado respecto al sistema de guiado.
Por ello el rango de detección de al menos un elemento de contacto Reed detecta oportunamente la barra dispuesta en la posición extrema en el lado final.
En... [Seguir leyendo]
Reivindicaciones:
1. Sistema de medición de posición (1) para la detección de una posición relevante (xmin, xmax) de una barra de guiado (3) extendida a lo largo de un camino rectilíneo (x) y que se desplaza a lo largo del camino rectilíneo (x) , respecto a un sistema de guiado (2) , con un número de elementos de contacto Reed (5) y con al menos un elemento magnético (7) , en el que
● el elemento magnético (7) está adaptado a la formación de un campo magnético (H) ,
● el elemento magnético (7) está conectado con la barra de guiado (3) ,
● el o cada elemento de contacto Reed (5) está configurado respectivamente dentro de un rango de detección para la detección de un campo magnético (H) , cuya intensidad de campo en el lugar del elemento de contacto Reed (5) es mayor que un valor umbral predefinido, y
● al menos un elemento de contacto Reed (5) está conectado con el sistema de guiado (2) y está dispuesto en un entorno (Ux) del camino (x) ,
en el que además está presente un sistema de medición inductivo para la determinación de posición de la barra de guiado (3) , que presenta un número de bobinas de inducción eléctricas (9) , y en el que está presente una disposición de circuitos (12) que comprende al menos una unidad de resistencia óhmica (R1, R2) ,
● que configura un circuito en serie (12) con al menos una de las bobinas de inducción (9) , y
● que configura un bucle de circuito (14, 15) con al menos uno de los elementos de contacto Reed (5) , en el que el bucle de circuito (14, 15) puentea y por consiguiente cortocircuita la unidad de resistencia óhmica (R1, R2) cuando se cierra el de contacto Reed (5) .
2. Sistema de medición de posición (1) según la reivindicación 1, en el que el elemento magnético (7) está configurado como un imán permanente.
3. Sistema de medición de posición (1) según la reivindicación 1 ó 2, en el que el elemento magnético (7) está conectado con la barra de guiado (3) en el lado final.
4. Sistema de medición de posición (1) según cualquiera de las reivindicaciones 1 a 3, en el que el rango de detección de al menos un elemento de contacto Reed (5) detecta la barra de guiado (3) dispuesta en la posición relevante (xmin, xmax) en el lado final.
5. Sistema de medición de posición (1) según cualquiera de las reivindicaciones 1 a 4, en el que la barra de guiado (3) se puede mover entre una posición extendida mínima (xmin) y una posición extendida máxima (xmax) .
6. Sistema de medición de posición (1) según cualquiera de las reivindicaciones 1 a 5, en el que la disposición de circuitos (12)
● comprende dos unidades de resistencia óhmicas (R1, R2) que configuran un circuito en serie (12) con una bobina de inducción (9) , en el que respectivamente una de las dos unidades de resistencia óhmicas (R1, R2) está conectada con respectivamente un lado final de la bobina de inducción (9) , y
● comprende una multiplicidad de elementos de contacto Reed (5) , en el que cada elemento de contacto Reed
(5) configura con una de las unidades de resistencia óhmicas (R1, R2) un bucle de circuito (14, 15) .
7. Sistema de medición de posición (1) según cualquiera de las reivindicaciones 1 a 6 con un grupo de circuitos (16) para la determinación de la resistencia óhmica total (∑R) de la disposición de circuitos (12) .
8. Sistema de medición de posición (1) según cualquiera de las reivindicaciones 1 a 7 con una unidad de control (11) , que comprende
● una fuente de corriente (17) para la alimentación de una corriente continua (IDC) en la disposición de circuitos (12) , y
● una primera unidad de medición (18) para la detección de la fracción de tensión continua (UDC) de una tensión total (U) en una disposición de circuitos (12) , y
● una segunda unidad de medición (19) para la detección de la fracción de tensión alterna (UAC) de una tensión total (U) en una disposición de circuitos (12) .
9. Sistema de medición de posición (1) según la reivindicación 8, en el que la unidad de control (11)
● está conectada con una segunda disposición de circuitos (13) , disposición de circuitos (13) que comprende una bobina eléctrica (8) , y
● está configurada para la formación y control de una corriente eléctrica (IAC) en la disposición de circuitos (13) .
10. Sistema de medición de posición (1) según la reivindicación 9, en el que la bobina eléctrica (8) está orientada y dispuesta en paralelo al camino rectilíneo (x) .
11. Sistema de medición de posición (1) según cualquiera de las reivindicaciones 1 a 10, en el que
● la barra de guiado (3) se da como barra de control (3) de una instalación nuclear, y
● el sistema de guiado (2) comprende un tubo de guiado (4) estable a la presión que rodea la barra de control (3) .
Patentes similares o relacionadas:
Aparato y método a prueba de fallos para aspirar y/o dispensar líquidos en instrumentos de laboratorio automatizados, del 4 de Diciembre de 2019, de BECKMAN COULTER, INC.: Aparato para impedir o bien la introducción de aire en un líquido aspirado desde un recipiente (C) a través de un tubo de aspiración que pasa a través de una tapa […]
Sonda de nivel de fluido de montaje lateral, del 19 de Julio de 2017, de LITTELFUSE, INC.: Una sonda de flotador para su ensamblado con una pared vertical de un depósito que comprende: un cuerpo de sonda de flotador que tiene […]
 Dispositivo de detección de nivel de aceite para motor de combustión interna, del 4 de Diciembre de 2013, de HONDA MOTOR CO., LTD.: Dispositivo de detección de nivel de aceite para un motor de combustión interna , incluyendo:
un alojamiento que permite la entrada de aceite […]
Dispositivo de detección de nivel de aceite para motor de combustión interna, del 4 de Diciembre de 2013, de HONDA MOTOR CO., LTD.: Dispositivo de detección de nivel de aceite para un motor de combustión interna , incluyendo:
un alojamiento que permite la entrada de aceite […]
Máquina de envasado y rellenado, del 5 de Noviembre de 2013, de TETRA LAVAL HOLDINGS & FINANCE SA: Una máquina de envasado y rellenado, en la que un material estratificado de envasado en forma de banda esempalmado en un empalme del siguiente material estratificado […]
 DISPOSITIVO PARA LA MEDICION DE LA CANTIDAD DE LIQUIDO QUE FLUYE Y EL PROCEDIMIENTO PARA SU MEDICION, del 14 de Noviembre de 2012, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Dispositivo para la medición de la cantidad de líquido que fluye y el procedimiento para su medición contiene situado dentro del receptor de […]
DISPOSITIVO PARA LA MEDICION DE LA CANTIDAD DE LIQUIDO QUE FLUYE Y EL PROCEDIMIENTO PARA SU MEDICION, del 14 de Noviembre de 2012, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Dispositivo para la medición de la cantidad de líquido que fluye y el procedimiento para su medición contiene situado dentro del receptor de […]
 Máquina de llenado de material de embalaje, del 20 de Junio de 2012, de TETRA LAVAL HOLDINGS & FINANCE SA: Una máquina de embalaje y llenado en la que se empalma un material laminado de embalaje a modo debanda en un empalme de un material laminado de embalaje siguiente a modo […]
Máquina de llenado de material de embalaje, del 20 de Junio de 2012, de TETRA LAVAL HOLDINGS & FINANCE SA: Una máquina de embalaje y llenado en la que se empalma un material laminado de embalaje a modo debanda en un empalme de un material laminado de embalaje siguiente a modo […]
APARATO DE DETECCIÓN DE NIVEL DE LÍQUIDO PARA ACEITE DE MOTOR, del 17 de Noviembre de 2011, de HONDA MOTOR CO., LTD.: Un aparato para detectar el nivel superficial de aceite en la cámara de acumulación de aceite de un motor , incluyendo el aparato: un flotador […]
DISPOSITIVO PARA INDICAR Y/O CONTROLAR FLUIDOS, del 26 de Agosto de 2011, de HYDAC FLUIDTECHNIK GMBH: Dispositivo para indicar y/o controlar fluidos, el cual comprende: - una caja ; - al menos una pieza de conexión conectada en la caja de modo […]