Sistema de manipulación de tejidos porosos.
Sistema de manipulación de tejidos porosos.
El sistema comprende un soporte (1) con un marco (2),
donde se sitúa la capa de tejido poroso (3) que se pretende manipular para situarla sobre otra capa de tejido poroso (3') previamente situada en una estructura de soporte general (9) y formar, mediante varias capas, una pieza de tejido. También incluye un elemento de trasporte (8) relacionado con un generador de flujo de aire (5) para conseguir tanto el trasvase de la capa de tejido poroso (3) desde el soporte (1) con el marco (2) hacia ese elemento de trasporte (8), así como manipular y soltar esa capa de tejido (3) para situarla sobre la capa de tejido poroso (3') situada sobre la estructura de soporte general (9), estando el generador (5) capacitado de variar el sentido de giro del flujo de aire para producir una depresión o una presión dinámica durante el manipulado de la correspondiente capa de tejido poroso (3).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201170.
Solicitante: INDUSTRIAS DELTAVIGO, S.L.
Nacionalidad solicitante: España.
Inventor/es: COMENDEIRO LINDIN,Jorge.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- D06H5/00 TEXTILES; PAPEL. › D06 TRATAMIENTO DE TEXTILES O SIMILARES; LAVANDERIA; MATERIALES FLEXIBLES NO PREVISTOS EN OTRO LUGAR. › D06H MARCADO, INSPECCION, UNION O SEPARACION DE MATERIALES TEXTILES (unión por cosido D05B). › Unión de materiales textiles.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema de manipulación de tejidos porosos, utilizable en la fabricación de piezas de fibra de carbono con tejidos secos.
El objeto de la invención es facilitar las operaciones de manipulación de los tejidos porosos para formar piezas de tejido, por superposición de capas.
La invención se encuadra en el sector técnico de fabricación de elementos o piezas textiles en las que la materia prima fundamental son los tejidos secos porosos.
ANTECEDENTES DE LA INVENCIÓN
Actualmente, en el sector de fabricación de piezas de fibra de carbono con tejidos secos y porosos, existe la problemática de precisión y repetibilidad del posicionado de los tejidos, y aunque existen procesos de corte de tejidos que están garantizado mediante medios de control numérico, así como procesos para conseguir deformaciones de los tejidos en plano, sin embargo existe un problema fundamental que se presenta como consecuencia de las distorsiones de las distintas fibras que forman el tejido, así como el
posicionado relativo entre las distintas capas de tejido que forman una pieza.
Esos problemas de precisión generan posteriormente defectos de resistencia en las piezas, debido a que las fibras no están situadas en la posición de deberían estar para ofrecer una resistencia adecuada, es decir para la que fueron diseñadas.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema de manipulación de tejidos porosos para formar piezas de tejido, se centra en abordar el proceso de cogida, sujeción y transporte de cada tejido poroso seco, es decir cada capa, para soltarla y ser posicionada sobre otra capa de tejido inferior a la que ha de unirse o fijarse convenientemente, para mediante el número de capas de tejido que sean, formar la pieza textil correspondiente.
Mas concretamente, el sistema de la invención, utilizando un soporte sobre el que se deposita la capa de tejido y un elemento de transporte para manipular el tejido hasta su colocación y posicionado sobre la capa inmediatamente inferior, o directamente sobre un útil, presenta la particularidad de que tanto el soporte como el elemento de transporte son piezas rígidas y están afectadas de orificios para el paso de un flujo de aire.
El soporte en cuestión incluye medios que deben asegurar el isostatismo con un marco asociado al mismo, teniendo este marco la forma del tejido, garantizando la geometría de dicha capa de tejido, para lo cual dicho marco está mecanizado con el contorno externo del tejido.
Por su parte el elemento de transporte y manipulación ofrecerá igualmente una garantía geométrica, con medios que aseguran el posicionado con respecto al marco, aunque se puede prescindir de dichos elementos si el conjunto se monta sobre un sistema automático, tipo máquina pórtico, robot, etc.
Sobre la cara inferior de tal elemento de transporte, y en virtud de los orificios de paso de flujo, se mantendrá pegada la capa de tejido poroso seco que se manipula.
Para coger, sujetar y llevar a cabo la función de transporte y posicionado de cada capa de tejido, se utiliza un generador de flujo de aire regulable que puede establecer un cambio en el sentido del flujo, para que en un sentido, , por ejemplo de descenso de flujo de aire proporcionada por el generador, se efectúe el posicionado de la capa de tejido poroso seco, sobre el soporte inferior, mientras que si se invierte el sentido de flujo, y éste realiza una depresión entre la superficie de transporte y el tejido, acompañada por una presión dinámica en los bordes, se producirá un succionado de esa capa de tejido sobre el elemento de transporte, adosándose a la cara inferior de éste y permitiendo que ese elemento de transporte lleve consigo la manipulación, posicionado y posterior fijación de la capa de tejido sobre otras situadas inferiormente.
Para asegurar el mantenimiento en geometría del primer tejido seco poroso, se puede utilizar un sistema de vacío similar a los existentes en las máquinas de corte de tejido, mientras que para llevar a cabo el desprendimiento de la capa de tejido seco poroso y su fijación sobre la capa inmediatamente inferior, se lleva a cabo un cambio de dirección de flujo de aire para que empuje y desprenda la capa de tejido seco poroso del elemento de transporte, depositándolo sobre la capa inmediatamente inferior y
fijándose a ésta última mediante un adhesivo que es activado mediante elementos calefactados en combinación con medios de presionado.
El proceso que se realiza mediante el sistema descrito, incluye las siguientes fases operativas:
Posicionado de la capa de tejido seco poroso en el soporte correspondiente, realizándose esa operación de forma manual. Montaje del generador de flujo conjuntamente con el elemento de transporte y manipulación, sobre un robot.
Activación del sistema generador del sistema de flujo de aire. Trasvase de la capa de tejido situada sobre el soporte, sobre el elemento de trasporte, por la depresión que se crea por parte de ese medio generador de flujo de aire.
Posicionado del robot con el elemento de transporte y el generador de flujo de aire, sobre el puesto de suelta o dejada de la capa de tejido seco poroso.
Activación de los medios de sujeción de la capa de tejido sobre el elemento de trasporte.
Inversión del sentido de flujo de aire en el generador de flujo, y correspondiente desprendimiento o suelta de la capa de tejido respecto del elemento de trasporte o manipulación. Activación de los medios de pegado, consistentes en activar un adhesivo, mediante elementos calefactados en combinación con elementos de presión, llevar a cabo la unión o fijación entre si de la capa de tejido seco poroso que se está manipulando sobre la capa seca de tejido poroso, sobre la estructura en que debe posicionarse la pieza obtenida.
Retirada del robot a la posición de reposo.
Repetición del ciclo para cada una de las capas de tejido
poroso seco a disponer sobre las capas situadas sobre la estructura de soporte general.
DESCRIPCIÓN DE LOS DIBUJOS
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
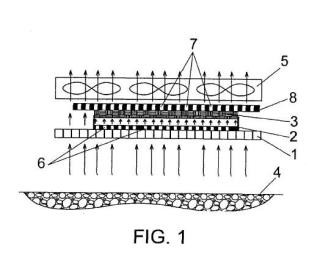
La figura 1.- Muestra una representación esquemática de una forma preferente de realización del sistema de manipulación de tejidos porosos realizado de acuerdo con el objeto de la invención.
La figura 2. Muestra una vista en planta de lo representado en la figura anterior, sin el generador de flujo de aire.
La figura 3.- Muestra una vista como la de la figura 1, pero disponiendo una capa de tejido poroso seco mediante elementos de transporte, sobre una estructura de soporte general.
La figura 4.- Muestra, finalmente, una vista de los medios que participan en la unión o fijación entre si de dos capas de tejido seco poroso que han sido manipuladas según el sistema de la invención.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
Como se puede ver en las figuras referidas, el sistema de la invención comprende en primer lugar un soporte (1) con un marco (2), donde se sitúa manualmente la correspondiente capa de tejido poroso (3), debiendo quedar el soporte (1) distanciado del suelo (4), según se representa en la figura 1, al objeto de evitar turbulencias en el flujo de aire.
El sistema incluye además un generador de flujo de aire (5), y un elemento de transporte y manipulación (8) de la propia capa de tejido (3), estando este elemento de transporte (8) afectado de orificios (7) para el paso de flujo de aire.
El soporte (1) con su marco (2) permite mantener la geometría del tejido poroso (3), permitiendo a su vez el paso del flujo de aire a través de orificios (6) del mismo.
El generador de flujo (5) ha de tener la capacidad suficiente para crear una depresión en la parte superior de la capa de tejido poroso (3), y al mismo tiempo conseguir una velocidad de aire suficiente para generar una presión dinámica que fíje los contornos.
Ese generador de flujo de aire (5) estará posibilitado de revertir el sentido de flujo para permitir el trasvase de la capa de tejido (3) desde el soporte (1) con el marco (2) hacia el propio elemento de trasporte (8).
Tanto el soporte (1) como el elemento de trasporte (8) son rígidos y su superficie tendrá la forma correspondiente a la superficie de la capa de tejido (3) que ha de situarse tanto en el soporte (2) como en el elemento de trasporte...
Reivindicaciones:
1.- Sistema de manipulación de tejidos porosos, utilizable en la fabricación piezas de fibras de carbono con tejido poroso seco, en donde se realizan las operaciones de coger, sujetar, trasportar o manipular, soltar, posicionar y fijar un tejido poroso sobre otro, para conseguir piezas de tejido, comprendiendo un soporte (1) con marco (2), con la forma de la capa de tejido (3) que se pretende manipular, así como un elemento de trasporte (8) con medios que aseguran el posicionamiento del propio tejido poroso (3) sobre otra capa de tejido poroso (3) situada previamente sobre una estructura de soporte general (9); caracterizado porque incluye un medio generador de flujo de aire (5) mediante el que se crea una depresión para sujeción de la capa de tejido poroso (3) sobre el elemento de trasporte (8), así como una presión dinámica en el contorno, para permitir la manipulación del propio tejido poroso (3); habiéndose previsto que el generador de flujo de aire (5) incluya medios para invertir el sentido de dicho flujo de aire, y para soltar la capa de tejido poroso (3) respecto del elemento de trasporte (8) y su correspondiente depositado y posicionado sobre la capa de tejido poroso (3) situada sobre la estructura de soporte general (9).
2- Sistema de manipulación de tejidos porosos, según reivindicación 1, caracterizado porque el soporte (1) con el marco (2) para el tejido poroso, es rígido y presenta una forma superficial igual a la superficie del soporte general (9) en la que se ha de depositar dicha capa de tejido poroso (3).
3.- Sistema de manipulación de tejidos porosos, según reivindicación 1, caracterizado porque el elemento de trasporte (8) es rígido y presenta una forma superficial igual a la superficie del soporte general (9) en la que se ha de depositar dicha capa de tejido poroso (3).
4.- Sistema de manipulación de tejidos porosos, según cualquiera de las reivindicaciones anteriores, caracterizado porque el soporte (1) con el marco (2) y el elemento de trasporte (8) están afectados de respectivos
orificios (6, 7) para el paso del flujo de aire.
5.- Sistema de manipulación de tejidos porosos, según cualquiera de las reivindicaciones anteriores, caracterizado porque el elemento de trasporte (8) incorpora medios calefactados (11) que, en combinación con
elementos de presionado (12), realiza la unión o fijación entre si de la capa de tejido poroso (3) manipulada sobre otra capa de tejido poroso (3) previamente situada sobre la estructura de soporte general (9).
6.- Sistema de manipulación de tejidos porosos, según cualquiera
de las reivindicaciones anteriores, caracterizado porque la zona del soporte
general (9) en la que han de posicionarse las capas de tejido poroso (3, 3), dispone de medios (14) para asegurar el mantenimiento en geometría de la capa de tejido poroso correspondiente, pudiendo dichos medios estar constituidos por un sistema de vacío.
Patentes similares o relacionadas:
Tejido que tiene una barrera impermeable, del 4 de Septiembre de 2019, de COLUMBIA SPORTSWEAR NORTH AMERICA, INC: Un tejido impermeable que comprende: un tejido base que tiene una superficie ori 5 entada hacia el cuerpo y una superficie orientada hacia el exterior; […]
Procedimiento para la fabricación de una prenda de vestir, del 7 de Marzo de 2019, de NTT NEW TEXTILE TECHNOLOGIES GMBH: Procedimiento para la fabricación de una prenda de vestir mediante la aplicación de un elastómero al tejido de al menos una capa de material […]
Procedimiento de realización, mediante soldadura de un artículo textil con revestimiento, del 20 de Mayo de 2015, de DBAPPAREL OPERATIONS: Procedimiento de realización de un artículo textil constituido por un material elástico realizado con al menos una parte de fibras termo- plásticas y que está recubierta […]
 CINTA DE TOLDO PEGADA DE FORMA SOLAPANTE, del 24 de Marzo de 2011, de MHZ HACHTEL GMBH & CO. KG: Cinta de tela o de lámina , en particular para instalaciones de sombra o soportes publicitarios, con una primera cinta parcial , […]
CINTA DE TOLDO PEGADA DE FORMA SOLAPANTE, del 24 de Marzo de 2011, de MHZ HACHTEL GMBH & CO. KG: Cinta de tela o de lámina , en particular para instalaciones de sombra o soportes publicitarios, con una primera cinta parcial , […]
 METODO PARA EL EMPALME DE TIRAS DE MATERIAL FLOCADO, del 16 de Mayo de 2008, de INDUSTRIAS TAPLA, S.L.: El método consiste, tras recortar convenientemente los extremos de los segmentos (1-1'') de las tiras de material flocado destinadas a formar […]
METODO PARA EL EMPALME DE TIRAS DE MATERIAL FLOCADO, del 16 de Mayo de 2008, de INDUSTRIAS TAPLA, S.L.: El método consiste, tras recortar convenientemente los extremos de los segmentos (1-1'') de las tiras de material flocado destinadas a formar […]
APARATO PARA ACABAR PIEZAS CORTADAS DE CIERTA LONGITUD DE TELA, PARTICULARMENTE PARA CERRAR EL BORDE PRINCIPAL DE UNA PIEZA TUBULAR., del 16 de Mayo de 2005, de RESTA S.R.L.: Aparato para acabar una pieza cortada de un tramo de material textil desenrollado de un rollo mediante el cosido de su borde delantero […]
PROCEDIMIENTO DE UNION DE PIEZAS TEXTILES Y PRODUCTO., del 1 de Mayo de 2005, de MANUFACTURAS TELENO, S.L.: Procedimiento de unión de piezas textiles y producto. Comprende aplicar una capa termoadhesiva en al menos una de las caras de las piezas textiles (1 ó 4), para posteriormente […]
PROCEDIMIENTO PARA OBTENER UNA COSTURA FUNDIDA PARA PIEZAS DE TEJIDO, del 8 de Junio de 2009, de PETRATEX-CONFECCOES, S.A.: Un procedimiento para obtener costuras fundidas que comprende unir dos capas de tejido mediante una película termofusible, que comprende las siguientes operaciones: […]