Método y sistema de determinación de la duración de los potenciales de acción de unidad motora en señales electromiográficas intramusculares.
Método y sistema de determinación de la duración de los potenciales de acción de unidad motora en señales electromiográficas intramusculares.
La invención comprende superponer el tren de potenciales de acción de la unidad motora capturado y recorrerlo mediante una ventana deslizante, donde en cada salto: se calcula un coeficiente de similitud por cada pareja del tren de potenciales, se obtiene un estadístico a partir de los coeficientes calculados para todas las parejas y, si se cumple una condición de finalización, se obtiene una curva de similitud, se determina el instante temporal donde la curva alcanza el valor máximo, el instante temporal inicial (Tinic) donde la curva atraviesa un primer umbral de inicio y el instante temporal final (Tfin) donde la curva atraviesa un primer umbral de fin y se obtiene la duración del potencial de los potenciales de acción de unidad motora mediante la diferencia entre Tfin y Tinic.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231940.
Solicitante: UNIVERSIDAD PUBLICA DE NAVARRA.
Nacionalidad solicitante: España.
Inventor/es: MALANDA TRIGUEROS,Armando, RODRÍGUEZ FALCÉS,Javier, NAVALLAS IRUJO,Javier, GONZÁLEZ IZAL,Miriam, RODRÍGUEZ CARREÑO,Ignacio, GILA USEROS,Luis.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/0488
- G06F17/15 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 17/00 Equipo o métodos de procesamiento de datos o de cálculo digital, especialmente adaptados para funciones específicas (recuperación de la información, estructuras de las bases de datos o estructuras de los sistemas de archivos G06F 16/00). › Cálculo de funciones de correlación.
- G06F17/18 G06F 17/00 […] › para la evaluación de datos estadísticos.

Fragmento de la descripción:
Método y sistema de determinación de la duración de los potenciales de acción de unidad motora en señales electromiográficas intramusculares.
Objeto de la invención
La presente invención tiene aplicación en el sector técnico del procesamiento y tratamiento de datos a partir de señales bioeléctricas, como son las señales electromiográficas, y se refiere a un método y a un sistema para determinar la duración de los potenciales de acción de unidad motora, obteniendo un valor de duración más preciso y optimizando la carga computacional requerida a los medios de procesamiento.
Más concretamente, el objeto de la invención es un método y un sistema para determinar la duración de los potenciales de acción de unidad motora (PAUMs) a partir de una señal electromiográfica.
Puesto que los PAUMs, procedentes de la actividad eléctrica de las unidades motoras activas cercanas al electrodo de registro, aparecen de forma repetitiva en trenes de PAUMs, es objeto de la presente invención determinar la duración de los PAUMs basándose en todo el conjunto de descargas (potenciales) del tren de PAUMs. Así, el método para la determinación de la duración descrito en la presente invención contempla la semejanza en la forma de cada una de las descargas que forman el tren de PAUMs y, en conjunto, determina el inicio y el fin del potencial.
Finalmente, un último objeto de la invención consiste en obtener un método y un sistema de gran interés en clínica para el estudio de patologías neurofisiológicas, que permite la obtención de mejores resultados respecto a procedimientos ya conocidos de determinación de la duración de los potenciales de acción de unidad motora. Además, la invención ofrece una mayor simplicidad computacional, lo cual permite la implementación de dicha invención en dispositivos sencillos, al no demandar grandes capacidades de procesamiento.
Antecedentes de la invención
Una unidad motora constituye la unidad anatómica y funcional de un músculo y está formada por una motoneurona y las fibras musculares inervadas por ella. En una contracción muscular voluntaria, las órdenes parten del cerebro y, a través de la médula espinal, se dirigen a las unidades motoras a través de sus respectivas motoneuronas. Estas órdenes se propagan mediante impulsos eléctricos (potenciales de acción) que viajan por las motoneuronas y llegan a las fibras musculares provocando la generación de nuevos potenciales eléctricos en estas fibras, los cuales, en último término, producen la contracción de las fibras. Al potencial eléctrico procedente del disparo de las fibras de una unidad motora se le conoce como potencial de acción de unidad motora o PAUM.
En una orden de contracción se envía, a través de la motoneurona, no sólo un potencial de acción aislado, sino sucesivas repeticiones del mismo. Consecuentemente, los PAUMs aparecen en sucesivos disparos o descargas. Al conjunto de estas descargas se le llama tren de PAUMs. Mediante unos medios de captación de señales, preferentemente un electrodo intramuscular conectado a un aparato de registro (electromiógrafo) es posible capturar la actividad eléctrica muscular, esto es, la señal electromiográfica, la cual puede albergar uno o varios trenes de PAUMs. Mediante técnicas manuales, sem¡automáticas o completamente automáticas es posible aislar de la señal EMG varios trenes de PAUMs contenidos en la misma.
Para el posterior estudio del PAUM suele ser común obtener una forma de onda representativa del mismo a partir de la colección de descargas registradas del tren de PAUMs. Para ello es habitual el uso de técnicas de promediado como la mediana o alguna otra técnica similar.
Una vez obtenida la forma de onda representativa del PAUM, son conocidos varios métodos que tienen por finalidad analizar cuantitativamente esta forma de onda. Este análisis cuantitativo se basa en la utilización de parámetros descriptivos de dicha forma de onda, los cuales, contienen información sobre la estructura y comportamiento fisiológico de la unidad motora. Entre dichos parámetros descriptivos se encuentra la duración del potencial, parámetro que guarda relación con la densidad de las fibras de la unidad motora y con la dispersión en las velocidades de conducción.
A día de hoy se conocen varios métodos de estimación de la duración del PAUM,
algunos de ellos publicados en Quantitative analysis of individual motor unit potentials - a proposition for estandardizad terminology and entena for measurement (J. Clin Neurophysiol, 1986; 3: 313-348; Stalberg E, Andreassen S, Falck B, Lang H, Rosenfalck A, Trojaborg W.).
Todos ellos se desarrollan partiendo de la base de que la señal previa al disparo de la unidad motora es de baja amplitud, únicamente debida al ruido ambiente, de esta forma, estos métodos utilizan criterios de amplitud y de pendiente sobre la forma de onda representativa para determinar la duración del PAUM. No obstante, estudios posteriores han comprobado la escasa fiabilidad de dichos métodos ya que su uso deriva en marcaciones poco precisas y en un elevado número de errores de marcación de magnitud elevada. Uno de estos estudios ha sido realizado por los solicitantes de la presente invención, concretamente, Motor unit action potential duration. Part I: variability of manual and automatic measurements (Journal of Clinical Neurophysiology, Feb. 2007, 24 (1): 52-58).
Trabajos más recientes, también realizados por el equipo de investigación del que forman parte los solicitantes de la invención, han permitido el desarrollo de nuevos métodos para determinar la duración del PAUM, los cuales han sido publicados en la literatura especializada: Motor unit action potential duration. Part II: a new automatic measurement method based on the wavelet transform (Journal of Clinical Neurophysiology, Feb. 2007, 24 (1): 59-69) y Application of a novel automatic duration method measurement based on the wavelet transform on pathological motor unit action potentials" (Clinical Neurophysiology, 121, 1574-1583, 2010). Estos métodos utilizan la transformada wavelet discreta para llevar a cabo la determinación de los cursores de inicio y fin sobre la curva obtenida de la transformada, y no sobre la forma de onda del PAUM que era lo que venía utilizándose en las técnicas anteriores.
Adicionalmente, estos estudios proponen un procedimiento de búsqueda de cursores más sofisticado que, entre otros, utiliza criterios de amplitud y de pendiente. No obstante, los estudios realizados, a pesar de mejorar los resultados de sus antecesores, continúan presentando errores de precisión considerables, especialmente en el caso de potenciales de acción cuyo retorno al cero eléctrico se produce gradualmente en el tiempo. Además, estos métodos presentan una elevada complejidad algorítmica derivada del cálculo de transformadas, concretamente de transformadas wavelet, lo cual genera una carga computacional considerable.
Según lo expuesto anteriormente, las invenciones hasta ahora conocidas por el estado de la técnica realizan la función del objeto de invención, pero de una manera poco fiable y poco precisa, especialmente cuando las señales bajo estudio presentan determinados comportamientos, como la presencia de colas largas en los potenciales. Además, dichas invenciones del estado de la técnica implican una elevada carga computacional que origina retrasos en la obtención de los resultados requeridos y dificulta la portabilidad del procesamiento asociado a dispositivos más sencillos y, en consecuencia, más económicos.
Descripción de la invención
La presente invención se refiere a un método y a un sistema para determinar la duración de los potenciales de acción de unidad motora que supera los inconvenientes existentes en la técnica señalados previamente.
En un primer aspecto, la invención se refiere a un método que comprende las etapas:
(i) recibir, de unos medios de captación de señal, un tren de potenciales de acción de la unidad motora;
y, computacionalmente, mediante unos medios de procesamiento:
(ii) superponer de forma alineada en el eje horizontal y en el eje vertical el tren de potenciales capturado;
(iii) recorrer, desde el inicio del eje horizontal, el tren de potenciales superpuestos mediante una ventana deslizante de tamaño (Lw) y salto (Ah) configurables donde cada salto (Ah) comprende:
(iv) calcular, por cada pareja del tren de potenciales superpuestos, un coeficiente de similitud que relaciona ambos potenciales en el intervalo temporal marcado por la ventana deslizante;
(v) obtener un estadístico a partir de los coeficientes de similitud calculados sobre todas y cada una de las parejas de tren de potenciales;
...
Reivindicaciones:
1.- Método de determinación de la duración de los potenciales de acción de unidad motora en señales electro mi ográficas intramusculares caracterizado por que comprende las etapas de:
(i) recibir, de unos medios de captación de señal (1), un tren de potenciales de acción de la unidad motora;
y, computacionalmente, mediante unos medios de procesamiento (3):
(ii) superponer de forma alineada en el eje horizontal y en el eje vertical el tren de potenciales capturado;
(iii) recorrer, desde el inicio del eje horizontal, el tren de potenciales superpuestos mediante una ventana deslizante de tamaño (Lw) y salto (Ah) configurables donde cada salto (Ah) comprende:
(iv) calcular, por cada pareja del tren de potenciales superpuestos, un coeficiente de similitud que relaciona ambos potenciales en el intervalo temporal marcado por la ventana deslizante;
(v) obtener un estadístico a partir de los coeficientes de similitud calculados sobre todas y cada una de las parejas de tren de potenciales;
(vi) comprobar si se cumple una condición de finalización prefijada para, en caso negativo, avanzar temporalmente el salto (Ah) de ventana y volver a la etapa (iv);
(vii) obtener una curva de similitud a partir de la interpolación de los estadísticos obtenidos en cada salto (Ah) de la ventana;
(viii) determinar el instante temporal T0 donde se encuentra el valor máximo de la curva de similitud;
(ix) a partir de T0, recorrer la curva de similitud hacia la izquierda para determinar el instante temporal inicial (T¡n¡c) donde dicha curva atraviesa un primer umbral de inicio (U¡n¡ci) de valor prefijado;
(x) a partir de T0, recorrer la curva de similitud hacia la derecha para determinar el instante temporal final (Tf¡n) donde dicha curva atraviesa un primer umbral de fin (Uf¡ni) de valor prefijado;
(xi) obtener la duración (d) del potencial de los potenciales de acción de unidad motora mediante la diferencia entre el instante temporal final (Tf¡n) y el instante temporal inicial (T¡n¡c).
2.- Método, según la reivindicación anterior, caracterizado por que comprende las etapas de:
(i) a partir de T¡n¡c, recorrer la curva de similitud hacia la izquierda donde, si la curva de similitud supera un segundo umbral de inicio (U¡n¡C2) prefijado, siendo U¡n¡c2> U¡n¡ci, los medios de procesamiento (3) están adicionalmente configurados para:
(ii) recorrer la curva de similitud hacia la izquierda hasta que dicha curva atraviese nuevamente el primer umbral de inicio (U¡n¡ci);
(iii) asignar a T¡n¡cel instante temporal en el que la curva de similitud cumplió la condición de la etapa anterior.
3.- Método, según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende las etapas de:
(i) a partir de Tf¡n, recorrer la curva de similitud hacia la derecha donde, si la curva de similitud supera un segundo umbral de fin (Uf¡n2) prefijado, siendo Uf¡n2> Uf¡m, los medios de procesamiento (3) están adicionalmente configurados para:
(ii) recorrer la curva de similitud hacia la derecha hasta que dicha curva atraviese nuevamente el primer umbral de fin (Uf¡ni);
(iii) asignar a Tf¡n el instante temporal en el que la curva de similitud cumplió la condición de la etapa anterior.
4 - Método, según cualquiera de las reivindicaciones anteriores, caracterizado por que la superposición de forma alineada del tren de potenciales de acción de la unidad motora en el eje horizontal y en el eje vertical comprende:
(i) una alineación en el eje horizontal comprendiendo la selección de la realización de una de entre las siguientes técnicas:
alineación por máximo de correlación cruzada de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por coincidencia en el pico máximo de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por coincidencia en el pico mínimo de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por nivel de disparo de los potenciales del tren potenciales de acción de la unidad motora;
alineación por mínimo del promedio de las diferencias de magnitud de los potenciales del tren de potenciales de acción de la unidad motora;
(ii) una alineación en el eje vertical comprendiendo la selección de la realización
de una de entre las siguientes técnicas:
eliminación de la componente continua de todos los potenciales del tren de potenciales de acción de unidad motora;
minimización de las diferencias entre los potenciales del tren de potenciales de acción de unidad motora.
5.- Método, según cualquiera de las reivindicaciones anteriores, caracterizado por que el cálculo del coeficiente de similitud comprende la selección de una de entre las siguientes técnicas:
coeficiente de correlación;
distancia euclídea normalizada;
distancia rectilínea normalizada.
6.- Método, según cualquiera de las reivindicaciones anteriores, caracterizado por que la obtención del estadístico a partir de cada coeficiente de similitud comprende la selección de uno de entre los siguientes estadísticos:
la media;
la media truncada;
la media ponderada;
la mediana;
la moda.
7.- Método, según cualquiera de las reivindicaciones anteriores, caracterizado por que la condición de finalización prefijada se cumple si el instante temporal correspondiente al próximo salto (Ah) de la ventana deslizante coincide o supera el instante temporal de la última muestra de los potenciales del tren de potenciales de acción de unidad motora recibida por los medios de captación de señal (1).
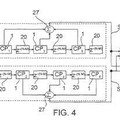
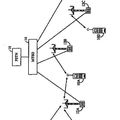
8.- Sistema de determinación de la duración de los potenciales de acción de unidad motora en señales electromiográficas intramusculares caracterizado por que comprende:
unos medios de captación de señal (1) encargados de captar el tren de potenciales de acción de la unidad motora procedentes de un paciente (2);
unos medios de procesamiento (3) en comunicación con los medios de captación de señal (1) configurados para:
o (i) recibir, de unos medios de captación de señal (1), un tren de potenciales de acción de la unidad motora; o (ii) superponer de forma alineada en el eje horizontal y en el eje vertical el tren de potenciales capturado;
o (iii) recorrer, desde el inicio del eje horizontal, el tren de potenciales superpuestos mediante una ventana deslizante de tamaño (Lw) y salto (Ah) configurables donde cada salto (Ah) comprende:
(iv) calcular, por cada pareja del tren de potenciales superpuestos, un coeficiente de similitud que relaciona ambos potenciales en el intervalo temporal marcado por la ventana deslizante;
(v) obtener un estadístico a partir de los coeficientes de similitud calculados sobre todas y cada una de las parejas de tren de potenciales;
(vi) comprobar si se cumple una condición de finalización prefijada para, en caso negativo, avanzar temporalmente el salto (Ah) de ventana y volver a la etapa (iv);
o (vii) obtener una curva de similitud a partir de la interpolación de los estadísticos obtenidos en cada salto (Ah) de la ventana; o (viii) determinar el instante temporal T0 donde se encuentra el valor máximo de la curva de similitud;
o (ix) a partir de T0, recorrer la curva de similitud hacia la izquierda para determinar el instante temporal inicial (T¡n¡0) donde dicha curva atraviesa un primer umbral de inicio (U¡n¡0i) de valor prefijado; o (x) a partir de T0, recorrer la curva de similitud hacia la derecha para determinar el instante temporal final (Tf¡n) donde dicha curva atraviesa un primer umbral de fin (Uf¡ni) de valor prefijado; o (xi) obtener la duración (d) del potencial de los potenciales de acción de unidad motora mediante la diferencia entre el instante temporal final (Tf¡n) y el instante temporal inicial (T¡n¡c);
una unidad de salida (4) en comunicación con los medios de procesamiento (3) configurada para representar la curva de similitud obtenida por los medios de procesamiento (3) y para mostrar el valor de duración de los potenciales de acción de unidad motora en señales electromiográficas intramusculares.
9.- Sistema, según la reivindicación 8, caracterizado por que los medios de procesamiento (3) están configurados para:
(i) a partir de T¡n¡c, recorrer la curva de similitud hacia la izquierda donde, si la curva de similitud supera un segundo umbral de inicio (U¡n¡C2) prefijado, siendo Umks5, Uin¡ci, los medios de procesamiento (3) están adicionalmente configurados para:
(ii) recorrer la curva de similitud hacia la izquierda hasta que dicha curva atraviese nuevamente el primer umbral de inicio (U¡n¡ci);
(iii) asignar a T¡n¡cel instante temporal en el que la curva de similitud cumplió la condición de la etapa anterior.
10.- Sistema, según cualquiera de las reivindicaciones 8 a 9, caracterizado porque los medios de procesamiento (3) están configurados para:
(i) a partir de Tf¡n, recorrer la curva de similitud hacia la derecha donde, si la curva de similitud supera un segundo umbral de fin (Uf¡n2) prefijado, siendo Uf¡n2> Uf¡i, los medios de procesamiento (3) están adicionalmente configurados para:
(ii) recorrer la curva de similitud hacia la derecha hasta que dicha curva atraviese nuevamente el primer umbral de fin (Uf¡ni);
(iii) asignar a Tf¡n el instante temporal en el que la curva de similitud cumplió la condición de la etapa anterior.
11.- Sistema, según cualquiera de las reivindicaciones 8 a 10, caracterizado porque los medios de procesamiento (3) están configurados para alinear el tren de potenciales de acción de la unidad motora en el eje horizontal comprendiendo la selección de la realización de una de entre las siguientes técnicas:
alineación por máximo de correlación cruzada de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por coincidencia en el pico máximo de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por coincidencia en el pico mínimo de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por nivel de disparo de los potenciales del tren de potenciales de acción de la unidad motora;
alineación por mínimo del promedio de las diferencias de magnitud de los potenciales del tren de potenciales de acción de la unidad motora.
12.- Sistema, según cualquiera de las reivindicaciones 8 a 11, caracterizado por que los
medios de procesamiento (3) están configurados para alinear el tren de potenciales de acción de la unidad motora en el eje vertical comprendiendo la selección de la realización de una de entre las siguientes técnicas:
eliminación de la componente continua de todos los potenciales del tren de potenciales de acción de unidad motora;
minimización de las diferencias entre los potenciales del tren de potenciales de acción de unidad motora.
13.- Sistema, según cualquiera de las reivindicaciones 8 a 12, caracterizado por que los medios de procesamiento (3) están configurados para calcular el coeficiente de similitud comprendiendo la selección de una de entre las siguientes técnicas:
coeficiente de correlación;
distancia euclídea normalizada;
distancia rectilínea normalizada.
14.- Sistema, según cualquiera de las reivindicaciones 8 a 13, caracterizado por que los medios de procesamiento (3) están configurados para obtener el estadístico a partir de cada coeficiente de similitud comprendiendo la selección de uno de entre los siguientes estadísticos:
la media;
la media truncada;
la media ponderada;
la mediana;
la moda.
15.- Sistema, según cualquiera de las reivindicaciones 8 a 14, caracterizado por que los medios de procesamiento (3) están configurados para activar la condición de finalización prefijada si el instante temporal correspondiente al próximo salto (Ah) de la ventana deslizante coincide o supera el instante temporal de la última muestra de los potenciales del tren de potenciales de acción de unidad motora recibida por los medios de captación de señal (1).
16.- Programa de ordenador que comprende medios de código de programa de ordenador adaptados para realizar las etapas del método de acuerdo con cualquiera de las reivindicaciones 1 a 7, cuando el mencionado programa se ejecuta en un ordenador,
un procesador digital de la señal, un circuito integrado específico de la aplicación, un microprocesador, un microcontrolador o cualquier otra forma de hardware programable.
Patentes similares o relacionadas:
Procedimiento de emulación del sonido de un amplificador de válvulas de vacío, del 23 de Agosto de 2017, de MARTINEZ GARCIA-CASARRUBIOS, José Manuel: Procedimiento de emulación del sonido de un amplificador de válvulas de vacío grabado en un estudio profesional mediante un pedal preamplificadar de estado sólido […]
 Aparato y procedimiento para la adquisición de una secuencia de ensanchamiento en sistemas DSSS aperiódicos, del 30 de Mayo de 2012, de SELEX ELSAG S.P.A: Un detector DSSS para detectar una sincronización entre una señal de espectro ensanchado(r(nTc)), que tiene una pluralidad de chips, r(n), y un valor […]
Aparato y procedimiento para la adquisición de una secuencia de ensanchamiento en sistemas DSSS aperiódicos, del 30 de Mayo de 2012, de SELEX ELSAG S.P.A: Un detector DSSS para detectar una sincronización entre una señal de espectro ensanchado(r(nTc)), que tiene una pluralidad de chips, r(n), y un valor […]
PROCEDIMIENTO PARA LA OBTENCION DE LA ACTIVIDAD DE TRANSICION DE UN CIRCUITO A PARTIR DE SU FUNCION DE TRANSFERENCIA, del 14 de Julio de 2010, de UNIVERSITAT POLITECNICA DE CATALUNYA: Procedimiento para la obtención de la actividad de transición de un circuito a partir de su función de transferencia. Procedimiento para la obtención […]
PROCEDIMIENTO DE ESTIMACION DE UNA MATRIZ DE CORRELACION DE SEÑALES INTERFERENTES RECIBIDAS POR UNA RED DE CAPTADORES., del 16 de Mayo de 2007, de THALES: Procedimiento para estimar la matriz de correla- ción de señales de características desconocidas recibidas por una red que comprende un número N de captadores, […]
CORRELACIONADOR PARALELO DE BAJA POTENCIA PARA MEDIR LA CORRELACION ENTRE SEGMENTOS DE SEÑAL DIGITAL., del 16 de Junio de 2002, de GENERAL ELECTRIC COMPANY: LA CORRELACION ENTRE UN PAR DE SEGMENTOS DE SEÑALES DIGITALES SE MIDE CON UN APARATO QUE INCLUYE UNA PLURALIDAD DE MULTIPLICADORES . […]
UN CIRCUITO CORRELADOR DE 1 BIT/2 NIVELES DE ALTA VELOCIDAD CON CAPACIDAD DE AUTOCALIBRACION DE LA FUNCION FRINGE-WASH., del 16 de Diciembre de 2000, de UNIVERSITAT POLITECNICA DE CATALUNYA: Un circuito correlador de 1 bit/2 niveles de alta velocidad con capacidad de autocalibración de la función de fringe - wash. Si bien la medida de la función de correlación cruzada […]
METODO Y APARATO PARA LA SIMULTANEA CONVOLUCION MULTIPLE DE IMAGENES BINARIAS DIGITALES, UTILIZANDO UN UNICO CONVOLUCIONADOR CON UNA MASCARA BINARIA PARA DETERMINAR LAS DENSIDADES DE PIXEL., del , de UNITED PARCEL SERVICE OF AMERICA, INC.: SE PRESENTA UN SISTEMA PARA ENROLLAR SIMULTANEAMENTE UNA PRIMERA Y UNA SEGUNDA IMAGEN DIGITAL BINARIA EN PARALELO CON UN ENROLLADOR SIMPLE QUE TIENE UNA […]
 BUSCADOR PROGRAMABLE DE FILTRO ADAPTADO PARA LA BUSQUEDA DE MULTIPLES SEÑALES PILOTO, del 16 de Diciembre de 2007, de QUALCOMM INCORPORATED: Un buscador programable de filtro adaptado que comprende: un registro de desplazamiento (401A-K, 403A-K, 800A-K) que funciona como un registro de desplazamiento […]
BUSCADOR PROGRAMABLE DE FILTRO ADAPTADO PARA LA BUSQUEDA DE MULTIPLES SEÑALES PILOTO, del 16 de Diciembre de 2007, de QUALCOMM INCORPORATED: Un buscador programable de filtro adaptado que comprende: un registro de desplazamiento (401A-K, 403A-K, 800A-K) que funciona como un registro de desplazamiento […]