Dispositivo para la medición de un vehículo.
Un dispositivo (3) para la medición de un vehículo (1) en una calzada (2),
con
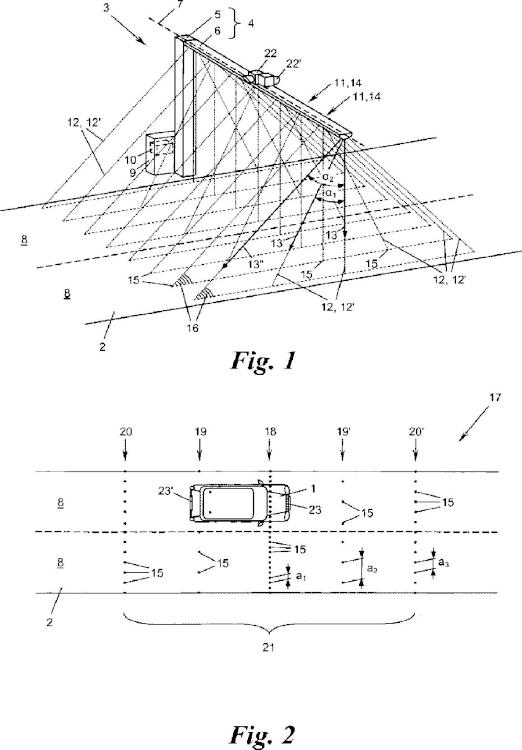
una estructura de soporte (4), que tiene un eje de soporte (7) que puede orientarse transversalmente por encima de la calzada (2),
una pluralidad de elementos emisores (11) que están montados en la estructura de soporte (4) de forma que están distribuidos a lo largo del eje de soporte (7) y que emiten cada uno un haz luminoso de medición (12) hacia abajo, estando dispuesto cada haz luminoso de medición (12) en una dirección de emisión (13, 13', 13") que se extiende en la dirección perpendicular respecto al eje de soporte (7),
al menos un elemento receptor (14) montado en la estructura de soporte (4), que recibe haces luminosos de medición reflejados (12') y
una unidad de evaluación (10) conectada a los elementos emisores y receptores (11, 14) para la medición del tiempo de propagación de la luz y para la medición de un vehículo (1) basada en esta medición,
caracterizado por que las direcciones de emisión (13, 13', 13") de al menos dos elementos emisores (11) no son paralelas entre sí.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13155206.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: LOSCHMIDT,PATRICK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G1/017 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › por identificación de los vehículos (G08G 1/015, G08G 1/054 tienen prioridad).
PDF original: ES-2529496_T3.pdf
Fragmento de la descripción:
Dispositivo para la medición de un vehículo
La presente invención se refiere a un dispositivo para la medición de un vehículo en una calzada.
La medición de vehículos tiene gran importancia, en particular, para detectar la idoneidad o autorización del uso de un tramo de carretera, p.ej. de un túnel o una carretera de peaje, o de un lugar, p.ej. un aparcamiento de pago o de una zona de un municipio. Delante de túneles deberían pararse a tiempo los vehículos que tienen una altura o anchura excesiva y en sistemas de peaje viarios o en aparcamientos deben determinarse los cánones por uso en función de la altura y/o anchura del vehículo. La medición de un vehículo debe realizarse a ser posible sin perjudicar el flujo del tráfico, es decir, durante la conducción en la calzada. Para este fin, se establecen por ejemplo pórticos de medición que se extienden transversalmente por encima de la calzada y que están equipados con sensores para la medición de un vehículo.
Si la calzada sólo dispone de un carril, una altura de vehículo puede determinarse p.ej. mediante barreras de luz que emiten a distintas alturas haces luminosos en la dirección transversal. Como alternativa, puede capturarse en primer lugar una imagen de un vehículo midiéndose el vehículo a continuación mediante una evaluación óptica de la imagen. Por el documento US 6,304,321 B1 se conoce un escáner láser montado en un pórtico de medición, que puede proyectar mediante un espejo desviador rotatorio con superficies reflectoras inclinadas de distintas maneras dos abanicos de exploración inclinados de distintas formas en la superficie de la calzada o del vehículo. Gracias a la apertura en abanico de los rayos láser de medición se producen efectos de sombreado, de modo que no pueden detectarse las superficies laterales no orientadas hacia el escáner de un vehículo, por lo que no pueden medirse.
Por el documento US 2004/0008514 A1 es conocido montar en un pórtico de medición una línea de elementos emisores y receptores individuales, que irradian verticalmente hacia abajo para la medición del tiempo de propagación de láser. Para no interferir unos en otros, los elementos emisores y receptores son mandados de forma secuencial individualmente o por grupos, lo que puede conducir a lagunas de detección en caso de vehículos que pasan rápidamente; por lo tanto, no es posible una asignación segura de distintas partes del vehículo o remolques a un vehículo.
La invención tiene el objetivo de crear un dispositivo para la medición de un vehículo, que supere los inconvenientes del estado de la técnica y que pueda usarse de forma flexible.
Este objetivo se consigue con un dispositivo para la medición de un vehículo, con
una estructura de soporte, que tiene un eje de soporte que puede orientarse transversalmente por encima de la
calzada,
una pluralidad de elementos emisores que están montadas en la estructura de soporte de forma que están distribuidos a lo largo del eje de soporte y que emiten cada uno un haz luminoso de medición hacia abajo, en una dirección de emisión que se extiende en la dirección perpendicular respecto al eje de soporte, al menos un elemento receptor montado en la estructura de soporte, que recibe haces luminosos de medición
reflejados y
una unidad de evaluación conectada con los elementos emisores y receptores para la medición del tiempo de propagación de la luz y para la medición de un vehículo basada en esta medición,
caracterizándose el dispositivo porque las direcciones de emisión de al menos dos elementos emisores no son paralelas entre sí.
Los haces luminosos de medición forman juntos en la calzada una zona de medición bidimensional y están orientados a pesar de ello siempre en planos paralelos a la dirección de marcha, de modo que pueden realizar una medición tridimensional de un vehículo sin efectos de sombreados laterales. Las distancias entre los haces en la dirección transversal respecto a la dirección de marcha pueden elegirse en distintas direcciones de emisión de forma completamente independiente entre sí, por lo que según las necesidades pueden ahorrarse elementos emisores y/o receptores y, por lo tanto, adicionalmente también potencia de cálculo en la evaluación. Gracias a la optimización de la disposición y los números de elementos emisores y receptores se descarga la estructura de soporte, de modo que también es posible un apoyo unilateral de la parte de la estructura de soporte que sobresale por encima de la calzada, que gracias a estas medidas es delgada. De este modo puede realizarse también de forma giratoria, p.ej. para realizar trabajos de mantenimiento.
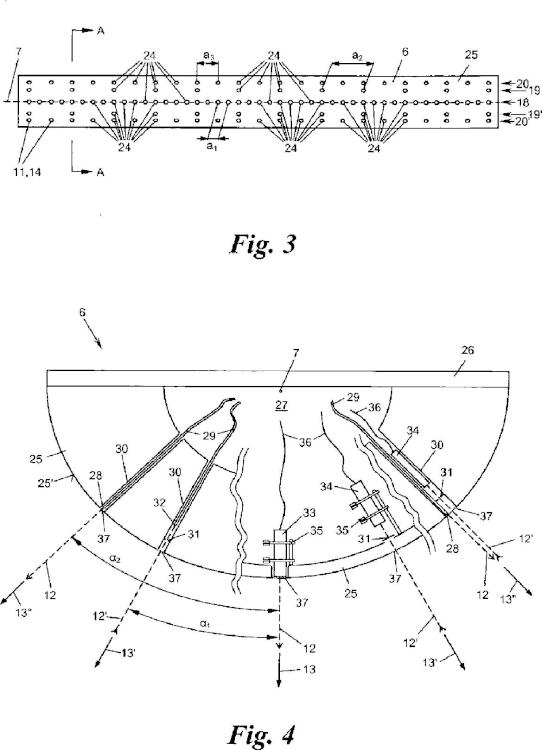
Para simplificar la evaluación de señales de medición, es ventajoso que los elementos emisores con direcciones de emisión paralelas entre sí formen un grupo y que el dispositivo tenga al menos dos grupos. Los grupos de este tipo de haces luminosos de medición paralelos forman juntos líneas de exploración que se extienden transversalmente por encima de la calzada y pueden ser evaluados juntos o respecto a un cometido específico. Con ayuda de una detección de un vehículo con ayuda de un primer grupo podrían mandarse componentes adicionales, p.ej. cámaras de tráfico o podría influirse en la secuencia en el tiempo de los haces luminosos de medición de un segundo grupo. De este modo pueden ahorrarse p.ej.energía y/o potencia de cálculo en tiempos de poco tráfico.
Es especialmente preferible que los elementos emisores de un primer grupo tengan primeras distancias mutuas regulares y los elementos emisores de un segundo grupo segundas distancias mutuas regulares distintas a las primeras. Las distancias mutuas de los haces luminosos de medición se adaptan así a distintos cometidos que requieren distintas resoluciones; su regularidad simplifica la orientación del dispositivo de medición y la evaluación.
Para poder seguir un vehículo de forma continua en todo el rango de medición, una forma de realización preferible de la invención está caracterizada por un primer grupo de elementos emisores dispuestos a poca distancia entre sí con direcciones de emisión verticales, al menos un segundo grupo de elementos emisores dispuestos a distancias largas entre sí con direcciones de emisión en un primer ángulo respecto a la vertical, y al menos un tercer grupo de elementos emisores dispuestos a poca distancia entre sí con direcciones de emisión en un segundo ángulo respecto a la vertical. Cada grupo de elementos emisores puede servir para un cometido determinado: el dispositivo de evaluación está realizado de forma especialmente preferible para evaluar las reflexiones de los haces luminosos de medición del primer grupo para la clasificación del vehículo, los del segundo grupo para el seguimiento del vehículo y los del tercer grupo para la detección del vehículo. Al detectarse un vehículo con el tercer grupo puede dispararse por ejemplo una captura de imagen de la matrícula del vehículo, a continuación de lo cual el vehículo puede seguirse con los haces luminosos de medición del segundo grupo, con una resolución inferior a lo largo de un trayecto más grande, de forma continua hasta los haces luminosos de medición del primer grupo, que están dispuestos a poca distancia entre sí y que con la dirección de emisión vertical ofrecen reflexiones que pueden recibirse especialmente bien, de modo que la clasificación del vehículo puede realizarse con alta precisión. Gracias al seguimiento continuo del vehículo en toda la zona de medición bidimensional, la vinculación de la matrícula del vehículo y el resultado de medición o clasificación se realizan a prueba de errores.
Como alternativa (o de forma complementaria), después de una clasificación del vehículo con el primer grupo, el vehículo también puede seguirse con ayuda de segundos grupos dispuestos a continuación hasta una (nueva) detección y puede seguirse con (otro) tercer grupo y a continuación, si se desea, puede dispararse (otra) captura de imagen, por ejemplo para fotos de la parte delantera y trasera del mismo vehículo y su placa de matrícula.
Es especialmente ventajoso que cada elemento emisor tenga asignado en la estructura de soporte muy cerca un elemento receptor propio. Esto permite una asignación simplificada en la evaluación de los distintos haces luminosos de medición reflejados y simplifica también la orientación de los elementos emisores y receptores. Además, se simplifica de este modo que varios o todos los elementos emisores emitan simultáneamente haces luminosos de medición, que son recibidos por los elementos receptores respectivamente asignados y cuyo tiempo de propagación de la luz se evalúa con ayuda del dispositivo de evaluación.
... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo (3) para la medición de un vehículo (1) en una calzada (2), con
una estructura de soporte (4), que tiene un eje de soporte (7) que puede orientarse transversalmente por encima de la calzada (2),
una pluralidad de elementos emisores (11) que están montados en la estructura de soporte (4) de forma que están distribuidos a lo largo del eje de soporte (7) y que emiten cada uno un haz luminoso de medición (12) hacia abajo, estando dispuesto cada haz luminoso de medición (12) en una dirección de emisión (13, 13, 13") que se extiende en la dirección perpendicular respecto al eje de soporte (7),
al menos un elemento receptor (14) montado en la estructura de soporte (4), que recibe haces luminosos de medición reflejados (12) y
una unidad de evaluación (10) conectada a los elementos emisores y receptores (11, 14) para la medición del tiempo de propagación de la luz y para la medición de un vehículo (1) basada en esta medición, caracterizado por que las direcciones de emisión (13, 13, 13") de al menos dos elementos emisores (11) no son paralelas entre sí.
2. Dispositivo de acuerdo con la reivindicación 1, caracterizado por que los elementos emisores (11) con direcciones de emisión (13, 13, 13") paralelas entre sí forman un grupo (18, 19, 19, 20, 20) y el dispositivo (3) tiene al menos dos grupos (18, 19,19, 20, 20).
3. Dispositivo de acuerdo con la reivindicación 2, caracterizado por que los elementos emisores (11) de un primer grupo (18) tienen primeras distancias mutuas regulares (ai) y los elementos emisores (11) de un segundo grupo (19, 19) tienen segundas distancias mutuas regulares (a2) distintas a las primeras.
4. Dispositivo de acuerdo con las reivindicaciones 2 o 3, caracterizado por un primer grupo (17) de elementos emisores (11) dispuestos a poca distancia entre sí con direcciones de emisión (13) verticales, al menos un segundo grupo (19, 19) de elementos emisores (11) dispuestos a distancias largas entre sí con direcciones de emisión (13) en un primer ángulo (cu) respecto a la vertical, y al menos un tercer grupo (20, 20) de elementos emisores (11) dispuestos a poca distancia entre sí con direcciones de emisión (13") en un segundo ángulo (02) respecto a la vertical.
5. Dispositivo de acuerdo con la reivindicación 4, caracterizado por que el dispositivo de evaluación (10) está realizado para evaluar las reflexiones (12) de los haces luminosos de medición (12) del primer grupo (18) para la clasificación de vehículos, los del segundo grupo (19, 19) para el seguimiento de vehículos y los del tercer grupo (20, 20) para la detección de vehículos.
6. Dispositivo de acuerdo con una de las reivindicaciones 1 a 5, caracterizado por que cada elemento emisor (11) tiene asignado muy cerca un elemento receptor (14) propio.
7. Dispositivo de acuerdo con una de las reivindicaciones 1 a 6, caracterizado por que delante de cada elemento receptor (14) se coloca un limitador de campo visual (31).
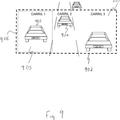
8. Dispositivo de acuerdo con una de las reivindicaciones 1 a 7, caracterizado por que cada elemento emisor (11) está formado por la salida (28) de una fibra conductora de luz (29), que es alimentada por una fuente de luz.
9. Dispositivo de acuerdo con la reivindicación 8, caracterizado por que las fibras conductoras de luz (29) salen de un punto central (10) en el dispositivo (3), en el que están dispuestas en cada caso una fuente de luz para una o varias fibras conductoras de luz (29).
10. Dispositivo de acuerdo con una de las reivindicaciones 1 a 9, caracterizado por que cada elemento receptor (14) está formado por la entrada (32) de una fibra conductora de luz (29), que es conducida a un convertidor optoeléctrico.
11. Dispositivo de acuerdo con la reivindicación 10, caracterizado por que el convertidor optoeléctrico es un sensor de imagen, a cuyos píxeles es conducida en cada caso una de las fibras conductoras de luz (29).
12. Dispositivo de acuerdo con una de las reivindicaciones 1 a 7, caracterizado por que los elementos emisores (11) son diodos emisores de luz o diodos láser (33) y los elementos receptores (14) son convertidores optoeléctricos (34), que están dispuestos al descubierto hacia el exterior en la estructura de soporte (4).
13. Dispositivo de acuerdo con una de las reivindicaciones 1 a 12, caracterizado por que la estructura de soporte (4) tiene una pluralidad de alojamientos (24) preparados en cada caso para un elemento emisor y/o receptor (11, 14), estando distribuidos los alojamientos (24) en forma de trama a lo largo de un lado (25) orientado hacia debajo de la estructura de soporte (4).
14. Dispositivo de acuerdo con la reivindicación 13 en combinación con la reivindicación 12, caracterizado por que los alojamientos (24) son soportes clip (35) para la inserción de diodos emisores de luz o diodos láser (33) y/o convertidores optoeléctricos (34).
15. Dispositivo de acuerdo con la reivindicación 13 en combinación con las reivindicaciones 8 a 11, caracterizado
por que los alojamientos (24) son cajas (30) que atraviesan una pared (25) de la estructura de soporte (4) para dejar pasar las fibras conductoras de luz (29).
16. Dispositivo de acuerdo con una de las reivindicaciones 13 a 15, caracterizado por que los tramos exteriores de 10 los alojamientos (24) están realizados como limitadores de campo visual (31).
Patentes similares o relacionadas:
Sistema y dispositivo de señales para la entrada y salida de vehículos de un aparcamiento, del 17 de Diciembre de 2019, de RODRIGUEZ BARROS, ALEJANDRO: Sistema de señales para la entrada y salida de vehículos de un aparcamiento, comprende dispositivos activos asociados a unos elementos pasivos (P1), (BL2), (RU) y a un […]
 Identificación de vehículo, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un método para identificar un transmisor alojado en vehículo que emite una señal de interferencia sobre una banda de frecuencia predefinida, comprendiendo el método
monitorizar […]
Identificación de vehículo, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un método para identificar un transmisor alojado en vehículo que emite una señal de interferencia sobre una banda de frecuencia predefinida, comprendiendo el método
monitorizar […]
Interfaz de búsqueda y reproducción de vídeo para la supervisión de vehículos, del 6 de Mayo de 2019, de HONEYWELL INTERNATIONAL INC.: Un procedimiento, que comprende: grabar fragmentos de vídeo respectivos de un área supervisada a partir de cada una cámara de una pluralidad de cámaras; proporcionar […]
Un sistema para uso en puestos de peajes de carretera, del 21 de Febrero de 2019, de KAPSCH TRAFFICCOM AB: Un sistema para su uso en puestos de peajes de carretera, que comprende un primer aparato óptico para grabar imágenes de una calzada y un segundo […]
Identificadores de comunicación de vehículos en base a la información de la placa de matrícula, del 14 de Febrero de 2019, de Nokia Technologies OY: Un procedimiento que comprende: recibir, desde un sensor, una imagen de un vehículo que incluye información de identificación del vehículo ; […]
Sistema de identificación y/o monitorización de vehículo, del 23 de Octubre de 2018, de Licensys Australasia Pty Ltd: Un aparato el cual puede funcionar para detectar e identificar vehículos, donde los vehículos individuales tienen cada uno al menos un dispositivo de comunicación RFID con una […]
Sistema mejorado para identificar un vehículo, del 17 de Octubre de 2018, de I.CAR S.r.l. (100.0%): Un sistema de identificación para un vehículo, que comprende: - al menos un elemento de identificación accesible para ser aplicado, […]
Procedimiento para la asignación de un emisor a un objeto a detectar, en la comunicación de vehículo a vehículo, y vehículo, del 23 de Mayo de 2018, de AUDI AG: Procedimiento para la asignación de un emisor, el cual transmite al menos una información de comunicación en una comunicación de vehículo a vehículo, a un objeto descrito mediante […]