Vehículo motorizado.
Una silla de ruedas (10) que incluye al menos una rueda motriz (18) conectada de modo giratorio a unaestructura (12),
que comprende:
un aro de empuje (22) para recibir una primera fuerza de entrada de un usuario;
un conjunto de engranajes (23) que conecta funcionalmente el aro de empuje (22) con la rueda motriz;
un motor (24) asociado funcionalmente con el conjunto de engranajes (23) para proporcionar una segunda fuerzapara alimentar la silla de ruedas (10);
un transductor (47) configurado para emitir al menos una señal indicativa de la primera fuerza de entrada;un sensor (74) configurado para emitir al menos una señal indicativa de un movimiento de la rueda motriz (18); yun controlador conectado eléctricamente al sensor (74) y al transductor (47), estando configurado el controladorpara
recibir la señal de salida del sensor (74) y la señal de salida del transductor (47), caracterizado por que elcontrolador está configurado para calcular una velocidad deseada de la rueda motriz utilizando un mapa de controlque imita un sistema con una inercia específica y un arrastre prescrito mediante una combinación de fricción linealy de Coulomb,
comparar la velocidad deseada de la rueda motriz calculada con la velocidad real de rueda motriz ygenerar y emitir una señal de control al motor (24) con el fin de reducir el componente de error entre dichavelocidad deseada de la rueda motriz y dicha velocidad real de la rueda motriz.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2000/023815.
Solicitante: Independence Technology, L.L.C.
Inventor/es: ULRICH,NATHAN, YOERGER,DANA R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61G5/04 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61G MEDIOS DE TRANSPORTE, MEDIOS DE TRANSPORTE PERSONALES O DISPOSICIONES ESPECIALMENTE ADAPTADAS PARA ENFERMOS O PARA INVALIDOS (aparatos para ayudar a caminar a enfermos o a inválidos A61H 3/00 ); SILLAS O MESAS DE OPERACIONES; SILLONES DE DENTISTA; DISPOSITIVOS DE INHUMACION (embalsamado cadáveres A01N 1/00). › A61G 5/00 Sillas o medios de transporte personales especialmente adaptados para enfermos o para inválidos, p. e., sillas de ruedas (equipamientos que permiten a los enfermos o a los inválidos controlar un aparato o dispositivo que no forma parte del cuerpo A61F 4/00; bicicletas especialmente adaptadas para inválidos B62K 3/16). › a motor (A61G 5/06 tiene prioridad; elementos de apoyo accionados por motor A61G 5/12; para vehículos con manillar, equipados con tres o más ruedas B62K 5/003, B62K 5/023).
- B60K1/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 1/00 Disposiciones o montaje de conjuntos de propulsión eléctricos (B60K 7/00 tiene prioridad; disposiciones o montaje de varios motores principales diferentes para una propulsión recíproca o común B60K 6/00; transmisiones eléctricas B60K 17/12; equipamiento eléctrico o propulsión de vehículos con tracción eléctrica en sí B60L; colectores de corriente para líneas de alimentación de energía sobre vehículos propulsados eléctricamente B60L 5/00). › que comprenden más de un motor eléctrico.
- B60K17/04 B60K […] › B60K 17/00 Disposiciones o montaje de las transmisiones en los vehículos (ejes que transmiten el par B60B 35/12; transmisiones y mecanismos de dirección combinados para dirigir las ruedas no orientables B62D 11/00; embragues en sí , p. ej. su construcción, F16D; engranajes en sí , p. ej. su construcción, F16H). › caracterizado por la disposición, el emplazamiento o el tipo de mecanismo de transmisión (equipamiento eléctrico o propulsión de vehículos con tracción eléctrica en sí B60L).
- B60K6/00 B60K […] › Disposiciones o montaje de varios motores principales diferentes para una propulsión recíproca o común, p.ej. sistemas de propulsión híbridos que comprenden motores eléctricos y de combustión interna.
- B60K7/00 B60K […] › Disposición del motor en la rueda motriz o adyacente a ella (mecanismos motores propulsando carretillas de patines A63C 17/12).
- B60L15/20 B60 […] › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 15/00 Métodos, circuitos o dispositivos para controlar la velocidad de los motores de tracción de vehículos propulsados eléctricamente, p.ej. la velocidad de los motores de tracción, para realizar rendimientos deseados,; Adaptación sobre el vehículo propulsado eléctricamente de la instalación de control a distancia a partir de un lugar fijo, a partir bien de diferentes puntos del vehículo, bien de diferentes vehículos de un mismo tren. › para el control de vehículo o de su motor, para realizar rendimientos deseados, p. ej. velocidad, par, variación programada de la velocidad.
- B62D49/04 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 49/00 Tractores (de tipo acompañado de pie B62D 51/04; características de orugas B62D 55/00). › modificados para recibir dispositivos de empuje.
- B62D51/04 B62D […] › B62D 51/00 Vehículos de motor caracterizados por no estar sentado el conductor. › andando el conductor.
- F16H1/20 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › implicando más de dos órganos engranados.
- H02P1/10 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 1/00 Disposiciones para arrancar motores eléctricos o convertidores dinamoeléctricos (arranque de motores síncronos con conmutadores electrónicos H02P 6/20, H02P 6/22; arranque de motores dínamoeléctricos que giran paso a paso H02P 8/04; control vectorial H02P 21/00). › Interruptor marcha-parada accionado manualmente, controlando relés o contactores que funcionan de forma sucesiva para el arranque de un motor.
PDF original: ES-2424045_T3.pdf
Fragmento de la descripción:
Vehículo motorizado
Campo técnico de la invención La presente invención se refiere generalmente a una silla de ruedas motorizada.
Antecedentes de la invención En la actualidad se utilizan diversos tipos de vehículos que son capaces de proporcionar una motorización controlada al usuario. Tales vehículos incluyen bicicletas eléctricas, carritos de mano, y diversos dispositivos de izado. Otra aplicación útil de este concepto es en una silla de ruedas motorizada. Ejemplos de tales sillas de ruedas se divulgan en los documentos de Patente de los Estados Unidos N.os 5.818.189; 5.234.066; y 4.050.533. En un montaje típico, un usuario 10 sentado acciona la silla de ruedas ejerciendo una fuerza sobre un aro de empuje situado a cada lado de la silla de ruedas. Normalmente cada aro de empuje está unido directamente a una rueda motriz externa de algún modo. La rueda motriz externa gira mediante algunos medios de motorización asociados con el movimiento del aro de empuje. Por ejemplo, la Patente de los Estados Unidos N.º 4.050.583 divulga el uso de motores individuales que accionan cada una de dos ruedas motrices separadas. Los motores están controlados por la cantidad de par aplicado por un operario al aro de empuje de la rueda motriz. En este y en sistemas similares, la fuerza aplicada por el usuario se utiliza principalmente para activar y controlar la salida del motor a las ruedas motrices externas.
Sin embargo, lo que se desea es un sistema de transmisión que proporcione una asistencia mecánica eficiente durante aquellos momentos en los que el sistema eléctrico no está en funcionamiento, minimizando el arrastre del tren de accionamiento desde el motor, y reduciendo los requerimientos energéticos del sistema en su conjunto.
El documento JP 10 014982 A muestra una silla de ruedas que está dotada de una rueda motriz, un aro de empuje, una batería y un motor. Un dispositivo de aumento de la velocidad y una pieza de control se disponen en una carcasa. El dispositivo de aumento de velocidad tiene un engranaje interno, un transportador, cuatro engranajes epicíclicos y un engranaje planetario. El engranaje interno está integrado con la rueda motriz. El transportador está conectado integralmente con el aro de empuje mediante un manguito. Una galga extensométrica está ajustada en la cara externa del
manguito. La pieza de control controla el motor en base a la magnitud de la fuerza de accionamiento humano, detectada por medio de la galga extensométrica, para añadir una magnitud especificada de fuerza de accionamiento eléctrico a la rueda motriz.
El documento WO 95/05141 A1 muestra una función de medida de una silla que permitirá medir la fuerza de propulsión aplicada a un anillo de accionamiento por el usuario de la silla, y proporcionar asimismo un servomotor accionado 30 eléctricamente en sillas de ruedas convencionales, accionadas manualmente. Unos sensores de potencia o fuerza se sitúan contiguamente a una unión respectiva entre el anillo de accionamiento y la rueda y actúan para medir la fuerza de propulsión aplicada por el usuario sobre el anillo de accionamiento. El anillo de accionamiento está sostenido asimismo mediante otros tipos de medios de unión que carecen de sensores de potencia o fuerza y que tan sólo proporcionan un efecto de fuerza en una dirección axial y que tienen el menor efecto posible en la dirección periférica del anillo de 35 accionamiento. Cada rueda puede sustituir a la rueda convencional de una silla de ruedas e incluye a este fin unos medios de acoplamiento rápido. Además, cada rueda puede estar dotada de un conjunto de accionamiento que incluye un motor que puede ser controlado como respuesta a señales medidas suministradas por los sensores de potencia. Una unidad de ordenador recibe la señal de potencia de cada rueda, la velocidad de la rueda y asimismo los ajustes elegidos por el usuario e introducidos en un panel de instrumentos, y calcula información útil del usuario y es efectiva a la hora de controlar el motor de acuerdo con un programa variable, en aquellos casos en los que el montaje incluye un motor.
El documento US 5.922.035 A divulga un procedimiento de control de lógica difusa para controlar un vehículo accionado manualmente, asistido por motor eléctrico, que se utiliza para ayudar a un conductor del vehículo. El vehículo comprende una transmisión para accionar el vehículo, un operador alimentado manualmente para recibir una fuerza manual introducida por el conductor para el accionamiento manual de la transmisión, un servomotor para generar una salida de 45 par, una reductora y un embrague para acoplar la salida de par del motor a la transmisión, un freno para reducir la velocidad del vehículo, un sensor de fuerza para detectar la fuerza manual aplicada por el conductor al operador alimentado manualmente, un sensor de velocidad para detectar la velocidad del vehículo, un sensor de frenado para detectar la activación y la desactivación del freno; y un sensor de motor para detectar la salida del motor. El procedimiento comprende las siguientes etapas: procesar las salidas del sensor de fuerza, sensor de velocidad, sensor de frenada y 50 sensor de motor para generar una pluralidad de variables difusas; evaluar la satisfacción del conductor en diversas categorías utilizando las variables difusas y generar una salida de tensión correspondiente para cada una de las categorías; evaluar la intención del conductor en cada una de las categorías y generar un factor de peso correspondiente para cada categoría; multiplicar la salida de tensión de cada categoría por su correspondiente factor de peso; y generar una salida de tensión de acuerdo con la suma de todas las salidas de tensión pesadas para controlar el servomotor para ayudar al conductor.
Sumario de la invención La presente invención, como se reivindica, proporciona una silla de ruedas que incluye un sistema de tren de accionamiento de peso ligero, compacto y barato. La entrada del usuario puede ser mejorada tanto mecánica como 5 electrónicamente para proporcionar un funcionamiento óptimo del sistema. Se divulga un circuito de control que controla la cantidad de motorización en base a las necesidades del usuario individual. Este circuito puede estar integrado en el alojamiento de engranajes para constituir un módulo sencillo, compacto y fácil de retirar. Asimismo el circuito puede ser modificado de acuerdo con las necesidades del usuario individual, variando el factor de desmultiplicación (grandes reducciones principalmente para su uso en interiores o en colinas/rampas pronunciadas y reducciones menores para uso deportivo o de alta velocidad) , u otros parámetros del sistema.
Un par u otra entrada proporcionada por el usuario se detectan mediante el uso de un transductor. Debido a que está detección es integral para el tren de accionamiento, no hay necesidad de anillos colectores u otros medios para comunicar señales de par a través de una conexión giratoria. El usuario puede modificar el sistema durante el funcionamiento seleccionando un mapa de control concreto utilizado por una unidad de procesamiento central (CPU) para determinar las características de rendimiento del vehículo.
El conjunto de rueda motriz/anillo de empuje puede ser diseñado para su retirada rápida. El pequeño tamaño del paquete de tren de accionamiento permite su adaptación a una diversidad de diseños de sillas de ruedas, incluyendo sillas de ruedas plegables. La silla de ruedas puede ser plegada y almacenada, ya sea con o sin las ruedas motrices incorporadas. Como cada conjunto de tren de accionamiento puede pesar menos de 2, 25 k (excluyendo las baterías) , el paquete añade poco peso a la silla de ruedas. Estas y otras ventajas de la presente invención serán fácilmente aparentes en la siguiente descripción del modo de realización preferente.
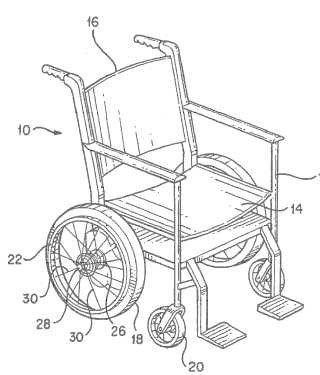
Breve descripción de los dibujos La fig. 1 es una vista en perspectiva de una silla de ruedas con un sistema de transmisión de la presente invención.
La fig. 2 muestra una vista en perspectiva en despiece de una porción del sistema de transmisión de la fig. 1.
La fig. 3 es una vista en perspectiva parcial aumentada del sistema de transmisión de la fig. 2.
La fig. 4 es una vista en planta del sistema de transmisión de la fig. 3.
La fig. 5 es una vista en perspectiva del sistema de transmisión de la fig. 2, incluyendo un motor.
La fig. 6 es una vista sección transversal de un primer conjunto de engranajes.
La fig. 7 es un esquema del sistema de transmisión de la fig. 1
La fig. 8 es un esquema de un concepto global del sistema de control.
La fig. 9 es un esquema de un bucle de enganche de velocidad.
La fig. 10 es un esquema para calcular una velocidad... [Seguir leyendo]
Reivindicaciones:
1. Una silla de ruedas (10) que incluye al menos una rueda motriz (18) conectada de modo giratorio a una estructura (12) , que comprende: un aro de empuje (22) para recibir una primera fuerza de entrada de un usuario;
un conjunto de engranajes (23) que conecta funcionalmente el aro de empuje (22) con la rueda motriz; un motor (24) asociado funcionalmente con el conjunto de engranajes (23) para proporcionar una segunda fuerza para alimentar la silla de ruedas (10) ;
un transductor (47) configurado para emitir al menos una señal indicativa de la primera fuerza de entrada; un sensor (74) configurado para emitir al menos una señal indicativa de un movimiento de la rueda motriz (18) ; y
un controlador conectado eléctricamente al sensor (74) y al transductor (47) , estando configurado el controlador para recibir la señal de salida del sensor (74) y la señal de salida del transductor (47) , caracterizado por que el
controlador está configurado para calcular una velocidad deseada de la rueda motriz utilizando un mapa de control que imita un sistema con una inercia específica y un arrastre prescrito mediante una combinación de fricción lineal 15 y de Coulomb,
comparar la velocidad deseada de la rueda motriz calculada con la velocidad real de rueda motriz y generar y emitir una señal de control al motor (24) con el fin de reducir el componente de error entre dicha velocidad deseada de la rueda motriz y dicha velocidad real de la rueda motriz.
2. La silla de ruedas (10) de la reivindicación 1, en la que un primer conjunto de engranajes está asociado funcionalmente con el aro de empuje y el transductor, y un segundo conjunto de engranajes está asociado funcionalmente con el motor.
3. La silla de ruedas (10) de las reivindicaciones 1 o 2, en la que el controlador comprende:
un dispositivo de computación para determinar la señal de control a partir de la señal del transductor utilizando una de las al menos una función programada; y
un controlador del motor conectado eléctricamente al dispositivo de computación para transmitir la señal de control al motor, incluyendo la señal de control una tensión y una polaridad para controlar una velocidad y una dirección del motor.
4. La silla de ruedas (10) de la reivindicación 3, en la que el dispositivo de computación es un microprocesador.
5. La silla de ruedas (10) de las reivindicaciones 3 o 4, en la que el controlador del motor comprende:
un convertidor digital a analógico para producir dicha tensión para controlar la velocidad del motor, y un circuito de puente en H para determinar la polaridad para controlar la dirección del motor.
6. La silla de ruedas (10) de cualquiera de las reivindicaciones anteriores, en la que el controlador comprende además una memoria para almacenar la al menos una función programada.
7. La silla de ruedas (10) de la reivindicación 6, en la que la memoria es una memoria de sólo lectura, programable, 35 borrable eléctricamente.
8. La silla de ruedas (10) de cualquiera de las reivindicaciones anteriores, en la que el primer conjunto de engranajes comprende un factor de desmultiplicación de entre 0, 5 y 2, 0.
9. La silla de ruedas (10) de cualquiera de las reivindicaciones anteriores, en la que el segundo conjunto de engranajes comprende un factor de desmultiplicación de dos etapas de, aproximadamente 18:1.
10. La silla de ruedas (10) de cualquiera de las reivindicaciones anteriores, en la que la señal de salida del sensor está asociada funcionalmente con un programa de corrección de errores.
11. La silla de ruedas (10) de cualquiera de las reivindicaciones anteriores, que comprende además un ordenador externo que tiene al menos un puerto de entrada/salida, configurado el ordenador externo para recibir una entrada funcional, y para emitir una función programada al controlador.
12. La silla de ruedas (10) de la reivindicación 11, en la que el al menos un puerto de entrada/salida incluye un 5 puerto infrarrojo.
13. La silla de ruedas (10) de cualquiera de las reivindicaciones anteriores, en la que el controlador está asociado funcionalmente con una interfaz de usuario, incluyendo la interfaz: un conmutador para seleccionar una función programada; y
un dispositivo de visualización para identificar la función seleccionada. 10
Patentes similares o relacionadas:
Dispositivo de potencia auxiliar y silla de ruedas, del 26 de Febrero de 2020, de Li Yuan Machinery Co., Ltd: Un dispositivo de potencia auxiliar para una silla de ruedas que comprende: una unidad de conexión que incluye una base y un eje central […]
Sistema de transferencia mini de viaje para personas con movilidad reducida., del 6 de Febrero de 2020, de VASSILLI S.R.L.: 1. Sistema de transferencia mini de viaje para personas con movilidad reducida caracterizado porque está compuesto por una base de apoyo dotada de […]
Ensamblaje de conexión para acoplar un sistema de impulsión auxiliar a una silla de ruedas para personas discapacitadas, del 22 de Enero de 2020, de Klaxon Mobility GmbH: Un ensamblaje de conexión para acoplar un sistema de impulsión auxiliar a una silla de ruedas (A) para personas discapacitadas, del tipo que comprende: - una […]
Dispositivo eléctrico montable/desmontable y silla de ruedas que incluye el mismo, del 6 de Noviembre de 2019, de Todo Works Co., Ltd: Un dispositivo de accionamiento de tipo montable y desmontable para una silla de ruedas, que comprende: un módulo de accionamiento […]
Estructura de soporte, del 11 de Septiembre de 2019, de Hexowheel: Una estructura de soporte que comprende: - una parte de recepción de carga , 5 diseñada para recibir una carga a transportar o asistir durante el movimiento; […]
SILLA DE RUEDAS, del 28 de Agosto de 2019, de TOTALCARE EUROPE, S.L: 1. Silla de ruedas para personas con movilidad reducida o lesión medular y con asistencia de motor eléctrico que comprende dos ruedas delanteras […]
 Silla de ruedas motorizada para personas con movilidad reducida o de edad avanzada, del 31 de Julio de 2019, de Conte, Giovanni: Silla de ruedas motorizada para usuarios con movilidad reducida o de edad avanzada (CA) que comprende un bastidor (T), un asiento (S) para el conductor […]
Silla de ruedas motorizada para personas con movilidad reducida o de edad avanzada, del 31 de Julio de 2019, de Conte, Giovanni: Silla de ruedas motorizada para usuarios con movilidad reducida o de edad avanzada (CA) que comprende un bastidor (T), un asiento (S) para el conductor […]
SILLÓN PARA DISCAPACITADOS, del 2 de Mayo de 2019, de PALACIOS SOFAS CB: Sillón para discapacitados que comprende un bastidor inferior, un mecanismo de elevación e inclinación vinculado al bastidor , unas ruedas laterales […]