SISTEMA PALETIZADOR PARA LINEAS DE ALIMENTACION DE EMBALAJES.
Sistema paletizador para líneas de alimentación de embalajes.
El sistema permite paletizar dos líneas de alimentación de embalajes mediante un único robot,
el cual además es universal, pudiéndose adaptar a cualquier tipo de embalaje. Para ello, está constituido a partir de dos líneas de alimentación de embalajes (1-2), que descargan conjuntamente sobre una línea alimentadora principal (8), transversalmente a la cual se establece un pórtico (9) en el que se dispone un lector láser (10) dotado de medios de detección de las dimensiones del embalaje, su color, así como de su posicionamiento en planta, de manera que un robot (14), preferentemente de seis ejes, cuyo brazo articulado está asociado a un cabezal de aspiración (15), se encarga de apilar los embalajes en función de la detección realizada sobre dos líneas de paletización (17-18).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131965.
Solicitante: CARTONAJES BERNABEU, S.A..
Nacionalidad solicitante: España.
Inventor/es: BERNABEU VIDAL,Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G57/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › por dispositivos, p. ej. de movimiento alternativo, que actúan directamente sobre los objetos, para transferirlos según la horizontal en la parte superior de las pilas.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema paletizador para líneas de alimentación de embalajes, especialmente concebido para permitir operar en el paletizado de los embalajes de forma simultánea con dos líneas de alimentación de embalajes de distinta configuración.
El objeto de la invención es por tanto, simplificar sensiblemente los costes asociados al proceso de paletización automática que presentan las líneas de alimentación de embalajes existentes hasta la fecha.
ANTECEDENTES DE LA INVENCIÓN
En el proceso de fabricación y distribución de embalajes, éstos, una vez obtenidos y plegados, se apilan sobre palets, formando bloques de considerable volumetría.
Como resulta obvio, en este tipo de industrias, es habitual que se fabriquen distintos tipos de embalajes, y que por tanto deban ser apilados en bloques independientes.
Así pues, para cada cadena de fabricación de cada embalaje se define una línea a través de la que se suministran los embalajes terminados y plegados, los cuales, hasta la fecha, o bien se apilan a mano sobre el citado palet, o bien se apilan mediante el empleo de un robot, cuyo brazo está asociado a una garra, que se adapta a las dimensiones preestablecidas del embalaje de que se trate.
Esto trae consigo que sea necesario el empleo de robots para cada línea de suministro de embalajes, y que, en algunos casos, y cuando la diferencia de tamaños entre embalajes fabricados sea considerable, el tener que utilizar garras para dichos robots de diferentes tamaños o configuraciones, con el consecuente costo que ello supone.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema paletizador que se preconiza ha sido concebido para resolver la problemática anteriormente expuesta, permitiendo, con un único robot, paletizar dos líneas de alimentación de embalajes, indistintamente de la diferencia de dimensiones que pueda haber entre los embalajes de una y otra línea de alimentación.
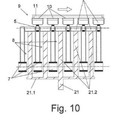
Para ello, y de forma más concreta, se ha previsto que el sistema de la invención incluya dos líneas de alimentación de embalajes, que se disponen paralelamente, y que descargan los embalajes sobre una mesa receptora, de anchura adecuada a la anchura que define el conjunto de dicho par de líneas, en la que, además del clásico mecanismo de rodillos para avance de los embalajes se dispone entre los mismos un sistema de desplazamiento transversal para los embalajes, a base de juegos de poleas/correas transversales, que desplazan los embalajes que llegan a la mesa receptora hasta uno de sus bordes laterales, quedando éstas alineadas a dicho borde, previamente a la entrada en el sistema.
Así pues, una vez se aliena la caja o embalaje, indistintamente de la línea de alimentación de que se trate, éste se hace avanzar a través de dicha mesa, hasta una línea de alimentación del sistema, en la que se define un pórtico, dispuesto transversalmente, sobre el que se dispone un lector láser, que, conjuntamente con el complementario sistema informático, permite detectar las dimensiones de la caja entrante, su color, y su posicionamiento en planta.
Así pues, una vez el embalaje o caja de que se trate avance a través del citado pórtico, el sistema reconoce dicho embalaje, actuando de una u otra manera en función de su tipo, así como de su posicionamiento.
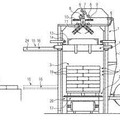
El sistema se complementa con un robot de seis ejes, cuyo brazo articulado está asociado a un cabezal de aspiración, que a través de una pluralidad de elementos de aspiración, convenientemente amortiguados, permite desplazar mediante efecto vacío, los embalajes entrantes al sistema, de manera que, junto a dicho robot se definen dos líneas de paletización, sobre las que se disponen los correspondientes palets, y sobre los que el robot se encargará de apilar los correspondientes embalajes.
Adicionalmente, dentro del radio de acción del robot, se ha previsto que se definan zonas de apilamiento para tapas, espaciadores o tableros que podrán disponerse sobre la base de los palets, intercalados entre un número predeterminado de embalajes, así como sobre la superficie superior del bloque de embalajes una vez este esté terminado, elementos que colocará igualmente el robot de forma totalmente automatizada en función de los parámetros de programación escogidos.
En este sentido, se ha previsto que el sistema cuente con una interfaz de control, a través de la cual se pueda visualizar el estado del proceso, así como seleccionar los tipos de apilamiento, así como la generación de mosaicos cuando los embalajes son de dimensiones sensiblemente menores que las dimensiones en planta del palet.
Transversalmente a la línea de alimentación del sistema, es decir, en oposición a la zona de recogida del robot, se ha previsto que se disponga una línea de rechazo, mediante la cual se retiren aquellos embalajes detectados a través del citado pórtico, que no se correspondan con los elementos a apilar, o que presenten una disposición inadecuada para el robot, si bien se ha previsto que el mismo pueda asumir un cierto margen de desfase angular en planta para los mismos.
A partir de esta estructuración, la mesa receptora de las dos líneas de alimentación de embalajes dispondrá de unas compuertas o topes escamoteables mediante los cuales se controlará la alimentación de una u otra línea a la mesa, pudiendo incorporar una línea transversal a través de la que se deriven los embalajes al objeto de evitar la sobresaturación de la línea.
De esta forma, el sistema posicionará convenientemente y detectará cada uno de los embalajes entrantes, y a través del citado robot los irá apilando en el palet que corresponda, hasta formar el bloque preprogramado, de manera que, una vez colocadas la tapa superior sobre dicho conjunto, en caso de que sea necesario, se procederá a la extracción del palet, y a la sustitución por uno vacío, para continuar el proceso sucediendo lo mismo con la otra línea de paletización.
Por último, cabe destacar el hecho de que justo a la entrada del citado pórtico, en la que los citados embalajes quedan alineados sobre uno de los bordes de la línea de alimentación, en correspondencia con dicho borde el sistema podrá incorporar una impresora para referenciar los embalajes.
DESCRIPCIÓN DE LOS DIBUJOS
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
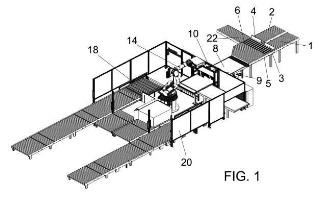
La figura 1. Muestra una vista en perspectiva de un sistema paletizador para dos líneas de alimentación de embalajes realizado de acuerdo con el objeto de la presente invención.
La figura 2. Muestra una vista en planta del conjunto de la figura anterior.
La figura 3. Muestra un detalle en perfil del sistema de la invención.
La figura 4. Muestra una vista en alzado frontal del conjunto.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
Como se puede ver en las figuras referidas, en el sistema paletizador que se preconiza participan dos líneas de alimentación de embalajes (1-2) , dotadas de medios de bloqueo escamoteables (3-4) en correspondencia con sus extremos, gobernados por el sistema informático de control, las cuales descargan los embalajes fabricados sobre una mesa receptora (5) de rodillos, en el que intercalados con dichos rodillos, se dispone de un sistema de poleas y correas (6) escamoteable, entre los rodillos, a través del cual los embalajes entrantes se desplazan transversalmente hasta hacer tope con uno de los laterales (7) de la mesa receptora (5) , quedando alineados con dicho lateral, para ser desplazados a través de una línea alimentadora principal (8) , transversalmente a la cual se establece un pórtico (9) en el que se establece un lector láser (10) a través del cual es posible detectar las dimensiones de la caja, su color, así como su correcto posicionamiento o alineado lateral, de manera que, los embalajes que se detecte que no están bien posicionados, son desviados a través de una línea lateral de rechazos (11) dispuesta transversalmente al extremo libre de dicha línea alimentadora principal (8) , operación que se lleva a cabo mediante un brazo (12) que se desplaza transversalmente sobre dicha línea, a lo largo de un carril (13) .
Pues bien, en correspondencia con el extremo libre de dicha línea alimentadora principal (8) , se ha previsto la inclusión de robot de seis ejes (14) , cuyo brazo articulado está asociado a un cabezal de aspiración...
Reivindicaciones:
1ª. Sistema paletizador para líneas de alimentación de embalajes, caracterizado porque está constituido a partir de dos líneas de alimentación de embalajes (1-2) , gobernados por un sistema informático de control, que descargan conjuntamente sobre una línea alimentadora principal (8) , transversalmente a la cual se establece un pórtico (9) en el que se dispone un lector láser (10) dotado de medios de detección de las dimensiones del embalaje, su color, así como de su posicionamiento en planta, habiéndose previsto que en correspondencia con el extremo libre de dicha línea alimentadora principal (8) , se establezca un robot (14) , preferentemente de seis ejes, cuyo brazo articulado está asociado a un cabezal de aspiración (15) , para desplazamiento de los embalajes, dotado de una pluralidad de elementos de aspiración (16) , estableciéndose junto a dicho robot dos líneas de paletización (17-18) , sobre las que se disponen los correspondientes palets, dentro del radio de acción del robot (14) .
2ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 1ª, caracterizado porque las líneas de alimentación de embalajes (1-2) incorporan medios de bloqueo escamoteables (3-4) en correspondencia con sus extremos, gobernadas por el sistema informático de control.
3ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 1ª, caracterizado porque las líneas de alimentación de embalajes (1-2) , descargan conjuntamente sobre una línea alimentadora principal (8) a través de una mesa receptora (5) de rodillos, de anchura acorde a la anchura conjunta de ambas líneas, en el que intercalados con dichos rodillos, se dispone de un sistema de poleas y correas (6) escamoteable, de desplazamiento transversal y alineado de los embalajes contra un lateral de la mesa.
4ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 1ª, caracterizado porque incorpora una línea lateral de rechazos (11) dispuesta transversalmente al extremo libre de la línea alimentadora principal (8) , asistida por un brazo (12) que se desplaza transversalmente sobre dicha línea, a lo largo de un carril (13) .
5ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 1ª, caracterizado porque dentro del radio de acción del cabezal del robot, se ha previsto que se incluyan zonas de apilamiento de tapas, tableros y espaciadores (19) .
6ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 1ª, caracterizado porque incorpora una envolvente perimetral de protección (20) , a base de paneles de metacrilato, cristal o similar, habiéndose previsto que sobre la misma se establezca una interfaz de control (21) , de visualizarción el estado del proceso de paletización, así como de selección de los parámetros de paletización deseados.
7ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 1ª, caracterizado porque, la línea principal de alimentación (8) está dotada en correspondencia con el lateral sobre el que se alinean los embalajes de una impresora.
8ª. Sistema paletizador para líneas de alimentación de embalajes, según reivindicación 3ª, caracterizado porque, la mesa receptora (5) incorpora una línea de derivación transversal (22) anti-sobresaturación de la alimentación del sistema.
Patentes similares o relacionadas:
Ensamblaje que comprende un elevador de palets y un dispositivo de paletizado, del 22 de Mayo de 2019, de Qimarox Patenten B.V: Un ensamblaje, que comprende: - un elevador de palets con el cual un palet se puede desplazar en la dirección de la altura; - un dispositivo […]
Instalación automática para la apertura automática de cajas para productos hortícolas y otros, del 2 de Octubre de 2018, de UNITEC S.P.A: Instalación para llevar a cabo automáticamente las operaciones de carga y descarga de un aparato que puede abrir las paredes laterales cerradas de una pluralidad […]
Dispositivo y método para empilar capas en un soporte, del 10 de Agosto de 2016, de Dematic GmbH: Dispositivo para apilar automáticamente artículos embalados en un soporte en una disposición física predeterminada para formar una pila, que tiene: - Al menos un […]
Dispositivo de apilamiento para una paleta de múltiples pilas, del 15 de Junio de 2016, de Dematic GmbH: Aparato para apilar automáticamente paquetes sobre un soporte en una disposición espacial predeterminada para formar una pila, al incluir - Al menos un transportador de […]
 Máquina apiladora de latas de conserva o envases similares, del 10 de Marzo de 2014, de ZORPACK S.L: Máquina apiladora de latas de conserva o envases similares, que comprende unas cintas transportadoras de entrada de envases que se encuentran […]
Máquina apiladora de latas de conserva o envases similares, del 10 de Marzo de 2014, de ZORPACK S.L: Máquina apiladora de latas de conserva o envases similares, que comprende unas cintas transportadoras de entrada de envases que se encuentran […]
 Dispositivo y procedimiento para fabricar una unidad de embalaje, del 28 de Agosto de 2013, de Maschinenfabrik Möllers GmbH (100.0%): Dispositivo para fabricar una unidad de embalaje que comprende varios objetos de embalaje apilados en unapila de productos con un mecanismo para envolver […]
Dispositivo y procedimiento para fabricar una unidad de embalaje, del 28 de Agosto de 2013, de Maschinenfabrik Möllers GmbH (100.0%): Dispositivo para fabricar una unidad de embalaje que comprende varios objetos de embalaje apilados en unapila de productos con un mecanismo para envolver […]
DISPOSITIVO PARA LA COLOCACION ORIENTADA DE PILAS DE PRODUCTOS DE IMPRENTA SOBRE PALES., del 1 de Septiembre de 2004, de SEGBERT GMBH & CO. KOMMANDITGESELLSCHAFT: Dispositivo para la colocación orientada de pilas de productos de imprenta sobre palés , en donde están previstos dos transportadores de alimen tación para alimentar […]