Procedimiento de segmentación, basado en características, para segmentar una pluralidad de artículos duplicados, dispuestos de manera desordenada, y un sistema para aplicar el procedimiento para alimentar una máquina de embalaje.
Un procedimiento de segmentación basado en características, para segmentar una pluralidad de artículos (3)duplicados,
dispuestos de manera desordenada, caracterizado por que comprende las etapas de:
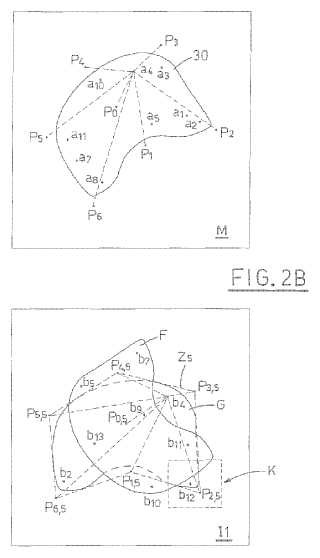
a) adquirir una imagen (M) de un artículo (30) de muestra;
b) calcular los puntos significativos de la imagen (M) de un artículo (30) de muestra y los descriptorescorrespondientes con el fin de obtener una pluralidad respectiva de pares punto significativo-descriptor (a1 ...a13) de la imagen (M) de un artículo (30) de muestra;
c) definir una figura (Z) identificativa en la imagen de un artículo (30) de muestra con el fin de aproximar unaforma del artículo (30) de muestra ilustrado en la imagen (M) de un artículo (30) de muestra;
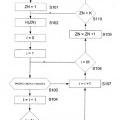
d) adquirir una primera imagen (I1) de una pluralidad de artículos duplicados;
e) calcular los puntos significativos de la primera imagen (I1) de la pluralidad de artículos (3) duplicados y losdescriptores correspondientes con el fin de obtener una pluralidad respectiva de pares punto significativodescriptor(b1 ..., b17) de la primera imagen (I1) de la pluralidad de artículos (3) duplicados;
f) determinar una correspondencia de los pares punto significativo-descriptor (a1, ... a13) de la imagen (M) de unartículo (30) de muestra con los pares punto significativo-descriptor (b1 ... b17) de la primera imagen (I1) de unapluralidad de artículos (3) duplicados con el fin de definir las correspondencias de similitud entre los pares puntosignificativo-descriptor (a1, ... a13) de la imagen (M) de un artículo (30) de muestra y los pares puntosignificativo-descriptor (b1, ..., b17) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados;
g) reconocer una posición relativa y una orientación relativa de la figura (Z) identificativa con respecto a unprimer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra que tiene unacorrespondencia con un segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de unapluralidad de artículos (3) duplicados;
h) definir, en la primera imagen (I1) de una pluralidad de artículos (3) duplicados, una figura de proyecciónidentificativa (Z6) que tiene una forma y una dimensión que son comparables o idénticas a las de la figuraidentificativa (Z), cuya figura de proyección identificativa (Z6) tiene una posición relativa y una orientaciónrelativa con respecto al segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de unapluralidad de artículos (3) duplicados que son idénticas , respectivamente, a la posición relativa y la orientaciónrelativa asumidas por la figura identificativa (Z) dispuesta en la imagen (M) de un artículo (30) de muestra conrespecto al primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra;i) aplicar las dos etapas precedentes a una pluralidad de pares punto significativo-descriptor (a2, a1, a5, a3, a4,a10, a11, a8, a9) de la imagen (M) de un artículo (30) de muestra que tienen un correspondencia con un parpunto significativo-descriptor (b12, b7, b9, b5, b4, b13, b10, b2, b11) de la primera imagen (I1) de una pluralidad deartículos (3) duplicados;
j) reunir las figuras de proyección identificativas (Z1, ..., Z9) que tienen entre las mismas un gradopredeterminado de superposición;
k) definir una figura representativa (F1, G1) para cada grupo de figuras de proyección identificativas (Z1, ..., Z9)que está formado por un número mínimo predeterminado de figuras de proyección identificativas (Z1, ..., Z9) ,cuya figura representativa (F1, G1) tiene una misma forma y dimensión que una figura de proyecciónidentificativa (Z1, ..., Z9), y es seleccionada con el fin de estimar una posición de un artículo (3) correspondienteilustrado en la primera imagen (I1) de una pluralidad de artículos (3) duplicados.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10160508.
Solicitante: MARCHESINI GROUP S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA NAZIONALE, 100 40065 PIANORO (BOLOGNA) ITALIA.
Inventor/es: MONTI, GIUSEPPE, PRATI,ANDREA, PICCININI,PAOLO, CUCCHIARA,M. RITA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06K9/64 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › utilizando comparaciones o correlaciones simultáneas de señales imágenes con una pluralidad de referencias, p. ej. matriz de resistencias.
PDF original: ES-2437158_T3.pdf
Fragmento de la descripción:
Procedimiento de segmentación, basado en características, para segmentar una pluralidad de artículos duplicados, dispuestos de manera desordenada, y un sistema para aplicar el procedimiento para alimentar una máquina de embalaje La presente invención se refiere a un procedimiento de segmentación, basado en características, para segmentar una pluralidad de artículos duplicados dispuestos de manera desordenada, dispuestos por ejemplo en una zona de almacenamiento donde son acumulados en una disposición aleatoria. La invención se refiere, además, a un procedimiento para recoger artículos dispuestos, de manera desordenada, en una zona de almacenamiento de artículos y para posicionar los artículos en una estación de salida, y a un grupo para aplicar el procedimiento. La invención se refiere también al uso del grupo para alimentar una máquina de empaquetado de artículos.
La detección y la segmentación de artículos son operaciones cruciales para diversas aplicaciones de visión por ordenador, tales como reconocimiento de un artículo (1) , adquisición de una imagen o un vídeo (2) , movimiento automático de un robot (3) , o aplicaciones industriales del tipo recogida y colocación (“pick and place”) (4) . Aunque para la adquisición de una imagen o un video, el objetivo fundamental es realizar una identificación única y mejor del artículo o elemento de interés, en el caso de las aplicaciones de recogida y colocación, por ejemplo, no se limita a realizar un recuento y una clasificación de la primera o la mejor identificación, sino que también determina la disposición, la orientación y las dimensiones de todos (o casi todos) los duplicados/identificaciones.
Los duplicados de los artículos pueden tener diferentes dimensiones, posiciones y orientaciones, y pueden ser observados desde diversos puntos de vista y bajo diversas condiciones de iluminación. De esta manera, la segmentación de los mismos puede llegar a ser muy problemática, especialmente si se tiene en cuenta la posibilidad de que algunos artículos son sólo parcialmente visibles, por ejemplo, como cuando los artículos se acumulan en una zona de almacenamiento de artículos en una disposición aleatoria.
La segmentación de los artículos duplicados se desarrolla, por ejemplo, en tres etapas principales.
El objetivo de la primera etapa es definir y calcular una medida apropiada de similitud entre el artículo objetivo (o parte del mismo) y los artículos duplicados en la imagen actual: con este propósito, se conocen dos soluciones diferentes de la técnica anterior. El primer procedimiento se refiere al modelo bolsas de palabras (Bags of Words o BoW) , que se basa en el histograma de las características locales (5) . Sin embargo, teniendo en cuenta el hecho de que el modelo BoW se basa en histogramas, el principal inconveniente consiste en la falta de información espacial, lo que hace que el procedimiento no sea fiable en escenarios desordenados en los que hay presentes artículos duplicados dispuestos, de manera desordenada. Un segundo procedimiento, conocido como el modelo basado en partes (Part Based Model) , tiene en cuenta la información espacial de las características locales (tales como el modelo de estrella (6) ) .
La segunda etapa explota la medición de la similitud con el fin de localizar los duplicados. Por ejemplo, las regiones co-variantes similares proporcionan un conjunto de puntos que son invariantes con respecto a la escala, rotación y traslación, siendo, de esta manera, robustas en el caso de variaciones en la iluminación y variaciones del punto de vista. Se extraen descriptores locales, tales como SIFT (Scale Invariante Feature Transform, transformación de características invariante a escala) (7) , de manera que puede aplicarse una transformación de Hough generalizada, o un modelo probabilístico (8) con el fin de localizar la posición de los artículos. También es conocido el uso de las características locales con el fin de localizar los artículos (9) que, debido al hecho de usar características muy específicas (tales como orificios redondos) , no puede extenderse fácilmente a cualquier tipo de artículo.
La tercera etapa se origina en la localización del artículo (por ejemplo, el centro de gravedad del artículo) con el fin de segmentar toda la forma del artículo de la manera más precisa posible y se ha usado pocas veces en la técnica anterior, ya que es necesario obtener la segmentación de toda la forma sólo para aquellas aplicaciones en las que debe estimarse el peso del artículo.
La publicación de S. Zickler y M. M. Veloso, “Detection and localization of multiple objetcs”, en Proc. Of 6th IEEERAS International Conference on Humanoid Robots, Diciembre 2006, páginas 20-25, identificado en [3] en las referencia bibliográficas al final de la presente descripción, describe un procedimiento que usa PCS-SIFT en combinación con un esquema de voto agrupado para conseguir la detección y la localización de múltiples objetos en datos de vídeo en tiempo real. El enfoque aborda restricciones que son comunes para los sistemas de visión humanoides, tales como cambios de perspectiva, oclusión parcial y desenfoque debido al movimiento. Un análisis y evaluación del rendimiento de dicho procedimiento ha sido descrito en ese documento en dos escenarios humanoides de ensayo concretos.
El objetivo de la presente invención consiste en proporcionar un procedimiento de segmentación basado en las características para segmentar una pluralidad de artículos duplicados de cualquier tipo y complejidad, dispuestos aleatoriamente, de manera que queden incluso parcialmente ocultos.
Un objetivo adicional de la presente invención consiste en proporcionar un procedimiento de segmentación basado en las características, cuya implementación permite alcanzar una velocidad de operación adecuada para aplicaciones industriales destinadas a recoger artículos desde una zona de almacenamiento de los mismos, en la que los artículos están dispuestos aleatoriamente.
Los objetivos indicados anteriormente se obtienen mediante un procedimiento de segmentación, basado en las características, para segmentar una pluralidad de artículos duplicados dispuestos, de manera desordenada, tal como se establece en la reivindicación 1.
Para cada grupo de figuras de proyección identificativas, la figura representativa correspondiente puede tomar una posición intermedia con respecto a las posiciones asumidas por las figuras de proyección identificativas del grupo considerado; por ejemplo, la posición de la figura representativa puede ser calculada como una media de las posiciones adoptadas por las figuras de proyección identificativas del grupo considerado. En general, sin embargo, existe una relación de proximidad entre la figura representativa, definida de esta manera, y las figuras de proyección identificativas del grupo considerado.
Las figuras representativas, definidas de esta manera, constituyen una estimación de la posición y la orientación de los artículos correspondientes ilustrados en la primera imagen de una pluralidad de artículos.
Las características del procedimiento según la reivindicación 1, tal como se ha establecido anteriormente, satisfacen ventajosamente los objetivos prefijados; los artículos duplicados capturados en la primera imagen pueden disponerse en un espacio tridimensional de una manera totalmente aleatoria, e incluso pueden superponerse parcialmente entre sí.
En general, cualquier figura identificativa puede ser seleccionada para estimar la forma del artículo de muestra que está ilustrado en la imagen de un artículo de muestra; una figura identificativa similar puede ser, por ejemplo, una figura geométrica irregular, tal como una figura que tiene un contorno formado por una línea discontinua y/o curva. Esta figura identificativa incluye, preferiblemente, el mismo artículo de muestra, y lo representa, en el sentido de que su área y contorno son comparables al área y el contorno del artículo de muestra, respectivamente. La figura identificativa puede ser la caja rectangular mínima que incluye el propio artículo de muestra; en términos más amplios, la figura identificativa puede estar constituida por un polígono que incluye el artículo de muestra; en un ejemplo, es posible seleccionar el polígono más pequeño que incluye el artículo de muestra según el número de lados y/o la longitud de los lados. Esto es particularmente ventajoso, ya que permite una aproximación del contorno del artículo de muestra por medio de una línea discontinua cerrada.
En un aspecto de la invención, cada figura de proyección identificativa, asociada a una figura identificativa correspondiente y un primer par punto significativo-descripción... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de segmentación basado en características, para segmentar una pluralidad de artículos (3) duplicados, dispuestos de manera desordenada, caracterizado por que comprende las etapas de:
a) adquirir una imagen (M) de un artículo (30) de muestra;
b) calcular los puntos significativos de la imagen (M) de un artículo (30) de muestra y los descriptores correspondientes con el fin de obtener una pluralidad respectiva de pares punto significativo-descriptor (a1 ... a13) de la imagen (M) de un artículo (30) de muestra;
c) definir una figura (Z) identificativa en la imagen de un artículo (30) de muestra con el fin de aproximar una forma del artículo (30) de muestra ilustrado en la imagen (M) de un artículo (30) de muestra;
d) adquirir una primera imagen (I1) de una pluralidad de artículos duplicados;
e) calcular los puntos significativos de la primera imagen (I1) de la pluralidad de artículos (3) duplicados y los descriptores correspondientes con el fin de obtener una pluralidad respectiva de pares punto significativodescriptor (b1 ..., b17) de la primera imagen (I1) de la pluralidad de artículos (3) duplicados;
f) determinar una correspondencia de los pares punto significativo-descriptor (a1, ... a13) de la imagen (M) de un artículo (30) de muestra con los pares punto significativo-descriptor (b1 ... b17) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados con el fin de definir las correspondencias de similitud entre los pares punto significativo-descriptor (a1, ... a13) de la imagen (M) de un artículo (30) de muestra y los pares punto significativo-descriptor (b1, ..., b17) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados;
g) reconocer una posición relativa y una orientación relativa de la figura (Z) identificativa con respecto a un primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra que tiene una correspondencia con un segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados;
h) definir, en la primera imagen (I1) de una pluralidad de artículos (3) duplicados, una figura de proyección identificativa (Z6) que tiene una forma y una dimensión que son comparables o idénticas a las de la figura identificativa (Z) , cuya figura de proyección identificativa (Z6) tiene una posición relativa y una orientación relativa con respecto al segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados que son idénticas , respectivamente, a la posición relativa y la orientación relativa asumidas por la figura identificativa (Z) dispuesta en la imagen (M) de un artículo (30) de muestra con respecto al primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra;
i) aplicar las dos etapas precedentes a una pluralidad de pares punto significativo-descriptor (a2, a1, a5, a3, a4, a10, a11, a8, a9) de la imagen (M) de un artículo (30) de muestra que tienen un correspondencia con un par punto significativo-descriptor (b12, b7, b9, b5, b4, b13, b10, b2, b11) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados;
j) reunir las figuras de proyección identificativas (Z1, ..., Z9) que tienen entre las mismas un grado predeterminado de superposición;
k) definir una figura representativa (F1, G1) para cada grupo de figuras de proyección identificativas (Z1, ..., Z9) que está formado por un número mínimo predeterminado de figuras de proyección identificativas (Z1, ..., Z9) , cuya figura representativa (F1, G1) tiene una misma forma y dimensión que una figura de proyección identificativa (Z1, ..., Z9) , y es seleccionada con el fin de estimar una posición de un artículo (3) correspondiente ilustrado en la primera imagen (I1) de una pluralidad de artículos (3) duplicados.
2. Procedimiento de segmentación según la reivindicación 1, caracterizado por que cada figura de proyección identificativa (Z1, ..., Z9) asociada a una figura identificativa (Z) correspondiente y un primer par punto significativodescriptor (a10) de la imagen (M) de un artículo (30) de muestra que tiene una correspondencia con un segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados, se obtiene como una transformación euclidiana de la figura identificativa (Z) .
3. Procedimiento de segmentación según la reivindicación 1 ó 2, caracterizado por que la imagen de un artículo (30) de muestra y la primera imagen (I1) de una pluralidad de artículos (3) duplicados son tomadas desde sustancialmente un mismo punto de vista.
4. Procedimiento de segmentación según la reivindicación 1 ó 2 ó 3, caracterizado por que el artículo (30) de muestra, antes de adquirir la imagen (M) del artículo (30) de muestra, es orientado en el espacio tridimensional en
una orientación que es similar o comparable a la orientación adoptada por un número de artículos (3) duplicados que son parte de la pluralidad de artículos (3) duplicados tomados a través de la primera imagen (I1) relativa de una pluralidad de artículos (3) duplicados.
5. Procedimiento de segmentación según una cualquiera de las reivindicaciones anteriores, caracterizado por que adquiere una pluralidad de imágenes del mismo artículo (30) de muestra, en el que cada imagen de la pluralidad de imágenes se distingue por el hecho de que el artículo (30) de muestra está girado en el espacio tridimensional en un ángulo predeterminado con respecto a una dirección perpendicular a un plano común en el que se toma la pluralidad de imágenes, y caracterizado por que las etapas sucesivas del procedimiento se repiten para cada imagen de entre la pluralidad de imágenes del artículo (30) de muestra.
6. Procedimiento de segmentación según una cualquiera de las reivindicaciones anteriores, caracterizado por que:
la figura identificativa (Z) en la imagen de un artículo (30) de muestra es identificado por medio de una pluralidad de puntos característicos (P0, P1, ..., P6) ;
la etapa de adquisición de la posición relativa y la orientación relativa de la figura identificativa (Z) con respecto a un primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra consiste en la adquisición de la posición relativa de los puntos característicos (P0, P1, ..., P6) dispuestos en la imagen de un artículo (30) de muestra con respecto al primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra;
la etapa de definir, en la primera imagen (I1) de una pluralidad de artículos (3) duplicados, una figura de proyección identificativa (Z6) que tiene una posición relativa y una orientación relativa con respecto al segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados que son idénticas, respectivamente, a la posición relativa y la orientación relativa asumidas por la figura identificativa (Z) dispuesta en la imagen (M) de un artículo (30) de muestra con respecto al primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra consiste en definir, en la primera imagen (I1) de una pluralidad de artículos (3) duplicados de los puntos de proyección característicos (P0.6, P1.6, ..., P6.6) que tienen cada uno una posición relativa con respecto al segundo par punto significativo-descriptor (b13) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados que es idéntica a la posición relativa asumida por un punto característico (P0, P1, ..., P6) correspondiente dispuesto en la imagen de un artículo (30) de muestra con respecto al primer par punto significativo-descriptor (a10) de la imagen (M) de un artículo (30) de muestra;
la etapa de agrupar las figuras de proyección identificativas (Z1, ..., Z9) , que tienen un grado predeterminado de superposición mutua, consiste en agrupar juntos los puntos de proyección característicos que tienen una primera relación de proximidad definida;
la etapa de definir una figura representativa (F1, G1) para cada grupo de figuras de proyección identificativas (Z1, ..., Z9) consiste en definir, para cada grupo de puntos de proyección característicos, formado de esta manera, un punto representativo (Cr) equivalente a un punto de proyección característico de una figura representativa (F1, G1) correspondiente con el fin de estimar una posición de un artículo (3) correspondiente ilustrado en la primera imagen (I1) de una pluralidad de artículos (3) duplicados.
7. Procedimiento para recoger artículos (3) dispuestos de manera desordenada en una zona de almacenamiento de artículos (3) y para posicionar los artículos (3) en una estación (SU) de salida, caracterizado por que comprende el procedimiento de segmentación según la reivindicación 6, en el que la primera imagen (I1) de una pluralidad de artículos (3) duplicados es obtenida tomando una primera imagen (I1) de una pluralidad de artículos (3) duplicados que están dispuestos, de manera desordenada, en una zona (5) de almacenamiento de artículos (3) duplicados, y por que comprende la recogida de un artículo (3) ilustrado en la primera imagen (I1) de una pluralidad de artículos (3) duplicados, al cual corresponde una figura representativa (F1, G1) , y posicionar el artículo (3) en la estación (SU) de salida.
8. Procedimiento según la reivindicación 7, caracterizado por que comprende, antes de la etapa de adquisición de una primera imagen (I1) de una pluralidad de artículos (3) duplicados dispuestos de manera desordenada en la zona
(5) de almacenamiento de artículos (3) duplicados, agitarlos los artículos (3) duplicados dispuestos en la zona (5) de almacenamiento de artículos (3) duplicados con el fin de disponerlos de manera que la capa superior relativa sea sustancialmente horizontal.
9. Procedimiento según la reivindicación 7 ú 8, caracterizado por que al menos un punto de proyección (P0.6) característico es también un punto adecuado para recoger el artículo (3) y por que comprende recoger el artículo (3) en el punto de proyección (P0.6) característico adecuado para recoger el artículo (3) .
10. Procedimiento según la reivindicación 7 ú 8 ó 9, caracterizado por que comprende además las etapas de:
identificar las figuras representativas (F1, G1) que, en la primera imagen (I1) de una pluralidad de artículos (3) duplicados, se cruzan entre sí;
detectar áreas comunes de intersección (50) correspondientes de las figuras (F1, G1) representativas que se cruzan entre sí;
identificar los pares punto significativo-descriptor (b3, b9, b11) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados, que se encuentran dentro de las áreas comunes de intersección (50) ;
identificar a qué figuras de proyección identificativas están asociados los pares punto significativo-descriptor (b3, b9, b11) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados;
identificar a qué figuras representativas (F1, G1) , que se cruzan entre sí, están asociadas las figuras identificativas con el fin de establecer en qué relación de superposición mutua están situados los artículos (3) ilustrados en la primera imagen (I1) de una pluralidad de artículos (3) duplicados, a los que corresponden las figuras (F1, G1) representativas, que se cruzan entre sí; y
establecer un orden de recogida de los artículos (3) .
11. Procedimiento según la reivindicación 8 ó 9 ó 10, caracterizado por que comprende las etapas de:
adquirir una segunda imagen (I2) de una pluralidad de artículos (3) duplicados que están dispuestos de manera desordenada en la zona (5) de almacenamiento de artículos (3) , en el que la segunda imagen (I2) es tomada desde un punto de vista que es diferente del punto de vista desde el que se ha tomado la primera imagen (I1) de una pluralidad de artículos (3) duplicados;
calcular los puntos significativos de la segunda imagen (I2) de la pluralidad de artículos (3) duplicados y los descriptores correspondientes con el fin de obtener una pluralidad respectiva de pares punto significativodescriptor de la segunda imagen (I2) de la pluralidad de artículos (3) duplicados;
determinar la correspondencia de los pares punto significativo-descriptor de la primera imagen (I1) de una pluralidad de artículos (3) duplicados con los pares punto significativo-descriptor de la segunda imagen (I2) de una pluralidad de artículos (3) duplicados con el fin de definir una correspondencia de similitud entre los pares punto significativo-descriptor de la primera imagen (I1) de una pluralidad de artículos (3) duplicados y los pares punto significativo-descriptor de la segunda imagen (I2) de una pluralidad de artículos (3) duplicados;
seleccionar un par punto significativo-descriptor (uj, uk) de la primera imagen (I1) de una pluralidad de artículos (3) duplicados que tiene un correspondencia con un par punto significativo-descriptor (vs, vn) en la segunda imagen (I2) de un pluralidad de artículos (3) duplicados con el fin de aproximar la posición del al menos un punto de proyección característico (P0F, P0G) , que también es un punto adecuado para recoger el artículo (3) ;
estimar la posición en el espacio tridimensional del par punto significativo-descriptor (uj, uk) , seleccionado de esta manera, y asociarlo con el punto de proyección característico (P0F, P0G) que es también un punto para recoger el artículo.
12. Un sistema (10) para recoger artículos (3) dispuestos, de manera desordenada, en una zona (5) de almacenamiento de artículos (3) y para posicionar los artículos (3) en una estación (SU) de salida según el procedimiento de las reivindicaciones 7 a 11, caracterizado por que comprende:
una estación (SU) de salida;
medios (8) para recoger al menos un artículo (3) desde una zona (5) de almacenamiento de artículos, dispuestos de manera desordenada, y para posicionar el al menos un artículo (3) en la estación (SU) de salida;
medios (11, 12) para la adquisición de una o más imágenes (I1, I2) de una pluralidad de artículos (3) duplicados dispuestos en la zona (5) de almacenamiento de artículos (3) desde uno o más puntos de vista diferentes y para la adquisición de una o más imágenes (M) de un artículo (30) de muestra;
una unidad (13) de control para recibir datos desde los medios (11, 12) de adquisición y para controlar los medios (8) de recogida y posicionamiento.
13. Sistema (10) según la reivindicación 12, caracterizado por que comprende además medios para agitar los artículos (3) duplicados dispuestos en la zona (5) de almacenamiento de artículos (3) duplicados con el fin de
disponer los artículos (3) de manera que la capa superior relativa sea sustancialmente horizontal.
14. Uso del sistema según la reivindicación 12 ó 13, para alimentar una máquina (7) de embalaje de artículos (3) , en el que la estación (SU) de salida del grupo (10) está conectada funcionalmente a la máquina (7) de embalaje.
Patentes similares o relacionadas:
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 2 de Julio de 2020, de UNIVERSIDAD DE GRANADA: La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense de cara a la identificación de […]
Método y sistema para identificar portaobjetos de muestras biológicas usando impresiones únicas de portaobjetos, del 13 de Septiembre de 2017, de DIAGNOSTIC VISION CORPORATION: Método para identificar un soporte de muestras biológicas, que comprende: adquirir una primera imagen microscópica de una marca […]
 Método y sistema para la identificación de artículos, del 20 de Agosto de 2014, de SICPA HOLDING SA: Método para identificar un artículo, que comprende las etapas de:
a) seleccionar al menos una zona de una imagen digital de dicho artículo; y
b) […]
Método y sistema para la identificación de artículos, del 20 de Agosto de 2014, de SICPA HOLDING SA: Método para identificar un artículo, que comprende las etapas de:
a) seleccionar al menos una zona de una imagen digital de dicho artículo; y
b) […]
 Identificación por reconocimiento de iris, del 16 de Julio de 2014, de MORPHO: Método de identificación a partir de datos biométricos de un iris (I) de un ojo que hay que identificar, que comprende las etapas consistentes en:
- codificar una imagen […]
Identificación por reconocimiento de iris, del 16 de Julio de 2014, de MORPHO: Método de identificación a partir de datos biométricos de un iris (I) de un ojo que hay que identificar, que comprende las etapas consistentes en:
- codificar una imagen […]
 Procedimiento y sistema para el control de la producción de artículos, del 20 de Junio de 2012, de SICPA HOLDING SA: Un procedimiento para controlar una producción de artículos (ii) en una línea de producción por medio dedatos de control comprendidos en cada uno de dichos artículos, dichos datos […]
Procedimiento y sistema para el control de la producción de artículos, del 20 de Junio de 2012, de SICPA HOLDING SA: Un procedimiento para controlar una producción de artículos (ii) en una línea de producción por medio dedatos de control comprendidos en cada uno de dichos artículos, dichos datos […]
 Reconocimiento de objetos 3D, del 28 de Marzo de 2012, de APPLE INC.: Un procedimiento para reconocimiento de objetos de un objeto tridimensional , 3D, que comprende lasetapas de:
- obtener al menos una representación bidimensional […]
Reconocimiento de objetos 3D, del 28 de Marzo de 2012, de APPLE INC.: Un procedimiento para reconocimiento de objetos de un objeto tridimensional , 3D, que comprende lasetapas de:
- obtener al menos una representación bidimensional […]
PROCEDIMIENTO PARA EL RECONOCIMIENTO OPTICO DE CARACTERES ALFANUMERICOS., del 1 de Diciembre de 2006, de SICK AG: Procedimiento para el reconocimiento óptico de caracteres alfanuméricos con las siguientes etapas: a) en una base de datos se depositan los contornos exteriores y los contornos […]
 MEJORAS RELACIONADAS CON LA DETECCION DE SUCESOS, del 11 de Octubre de 2010, de BAE SYSTEMS PLC: Un procedimiento para detectar el acaecimiento de un suceso en una multitud, comprendiendo el procedimiento las etapas de:
(a) provisión de una grabación […]
MEJORAS RELACIONADAS CON LA DETECCION DE SUCESOS, del 11 de Octubre de 2010, de BAE SYSTEMS PLC: Un procedimiento para detectar el acaecimiento de un suceso en una multitud, comprendiendo el procedimiento las etapas de:
(a) provisión de una grabación […]