Resolución parcial de la ambigüedad para la estimación del retardo ionosférico multifrecuencia.
Un procedimiento para determinar componentes de fase de señales portadoras (3) emitidas por satélites (2) deun sistema (1) de navegación por satélite,
que comprende las acciones:
• un sistema usuario (5) recibe las señales portadoras (3) procedentes de diversos satélites
• las ambigüedades enteras de fase de las señales portadoras (3) recibidas de los satélites (2) son resueltaspor medio de una resolución parcial de ambigüedades usando un orden secuencial seleccionado según uncriterio de optimización
caracterizado porque
• el criterio de optimización es el número máximo de ambigüedades de fase que puede ser resuelto por laresolución parcial de ambigüedades, porque
• el número de ambigüedades de fase resolubles se maximiza seleccionando el orden secuencial usando unrequisito predefinido sobre la probabilidad de resolución errónea de ambigüedades de fase, y porque
• la probabilidad de resolución errónea se calcula usando una cota superior predefinida de los sesgosambientales de medición.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09172607.
Solicitante: DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V..
Inventor/es: HENKEL,PATRICK, GOMEZ,VICTOR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/44 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Resolución de la ambigüedad de la fase de la portadora; Ambigüedad flotante; método LAMBDA [Least-squares AMBiguity Decorrelation Adjustment].
PDF original: ES-2426865_T3.pdf
Fragmento de la descripción:
Resolución parcial de la ambigüedad para la estimación del retardo ionosférico multifrecuencia.
La presente invención versa acerca de un procedimiento para determinar los componentes de fase de una señal portadora emitida por satélites de un sistema de navegación por satélite que comprende las acciones:
– las señales portadoras son recibidas por un sistema usuario desde diversos satélites.
– las ambigüedades enteras de fase de las señales portadoras recibidas de los satélites se resuelven en una secuencia de resolución seleccionada según un criterio de optimización.
La invención versa, además, acerca de un sistema usuario de navegación.
Tal procedimiento y tal sistema usuario son conocidos por el documento EP 1 972 959 A1. Según el procedimiento conocido, las señales portadoras de un sistema de navegación global por satélite se procesan usando combinaciones lineales de las señales portadoras para estimar las ambigüedades de fase y el error ionosférico. Dado que el error ionosférico es conocido, la posición del sistema usuario puede determinarse de forma absoluta sin usar mediciones paralelas de una estación de referencia.
El procedimiento conocido se aplica a un sistema de navegación global por satélite con al menos tres portadoras, tal como mediciones GPS de triple frecuencia y Galileo multifrecuencia. El mayor número de frecuencias y la modulación optimizada de las nuevas señales Galileo y la señal L5 de GPS reducirán la varianza de ruido. Sin embargo, las desventajas inherentes para la resolución parcial de ambigüedades no están mitigadas. Una de ellas es la actual maximización de la fiabilidad de la primera resolución en vez de la maximización del número de ambigüedades resolubles de manera fiable. Otra deficiencia es que no se han tenido en cuenta los errores sistemáticos para la búsqueda de un orden óptimo de resolución.
Se describe la resolución parcial de ambigüedades en Teunissen et al: “Geometr y -Free Ambiguity Success Rates in Case of partial Fixing”, 1999, que se usa para la delimitación bipartita de la reivindicación 1.
El comportamiento dispersivo de la ionosfera en la banda L también puede estimarse dentro del GPS. En la actualidad, el retardo ionosférico se estima a partir de las mediciones de código L1 y L2 de GPS, que se modulan con BPSK. Esta modulación centra la potencia en torno a la frecuencia portadora; es decir, la densidad espectral de la potencia es sustancialmente menor en los bordes de la banda que en el centro de la banda. Esto da como resultado una cota de Cramér-Rao mayor que otras modulaciones y, así, un mayor ruido del código. El mayor ruido del código, así como errores por trayectoria múltiple son amplificados adicionalmente por la combinación lineal para la estimación del retardo ionosférico. Se obtiene una estimación aproximada mediante una simple combinación solo de códigos L1-L2. Los coeficientes de ponderación de la combinación dual de frecuencias se escogen de tal modo que se eliminan la auténtica distancia y los errores no dispersivos (desfases horarios y retardo troposférico) y solo se conserva el retardo ionosférico. Los coeficientes de ponderación de una combinación dual de frecuencias solo de código están dados unívocamente por las restricciones sin geometría y de conservación del efecto ionosférico. Por
lo tanto, no hay ningún grado de libertad para minimizar la varianza del ruido. Por lo tanto, una estimación del retardo ionosférico con mediciones de códigos L1 y L2 de GPS requiere un aplanamiento de la portadora sin efecto ionosférico con grandes constantes de tiempo y grandes periodos de inicialización de filtro para lograr una precisión de un centímetro.
Las mediciones de fase de las portadoras también pueden usarse para la estimación del posicionamiento y del
retardo ionosférico además de las mediciones de código. Las mediciones de fase de las portadoras son aproximadamente tres órdenes de magnitud más precisas que las mediciones de código. Sin embargo, son ambiguas, ya que la fase fraccionaria de la medición inicial no proporciona información alguna del número entero de ciclos (denominado ambigüedad de enteros) entre el receptor y el satélite.
Un aplanamiento de la portadora sin efecto ionosférico es un procedimiento usado de forma generalizada por las 45 mediciones de fase de las portadoras para reducir el ruido del código sin resolver sus ambigüedades. Puede lograrse una precisión de un centímetro para la estimación del retardo ionosférico con constantes de tiempo y periodos de inicialización de filtro de varios minutos.
Una precisión aún mayor de la estimación del retardo ionosférico requiere la resolución de las ambigüedades de enteros de fase de la portadora. La resolución fiable de todas las ambigüedades no puede lograrse en condiciones 50 graves de trayectoria múltiples, que afectan especialmente a los satélites de baja elevación, de modo que la resolución está limitada a un subconjunto de ambigüedades (= resolución parcial) . Existen diversos enfoques a la estimación de las ambigüedades de enteros; por ejemplo, el redondeo síncrono de la solución de coma flotante, una resolución secuencial (= remuestreo) , una búsqueda de mínimos cuadrados enteros o una estimación de aperturas de enteros.
El redondeo síncrono de la solución de coma flotante es el procedimiento más simple. Sin embargo, no considera la correlación entre las estimaciones de ambigüedades de valor real, lo que da como resultado una tasa menor de éxito
y un menor número de resoluciones fiables que otros procedimientos. Además, no existe una expresión analítica para la tasa de éxito, que tiene que ser determinada por medio de exhaustivas simulaciones de Montecarlo.
La resolución secuencial de ambigüedades (remuestreo) es otro procedimiento muy eficiente que tiene en cuenta la correlación entre las ambigüedades de coma flotante y, por lo tanto, permite una probabilidad de resolución errónea sustancialmente inferior. Una ventaja es que la tasa de éxito puede calcularse analíticamente. Sin embargo, esta tasa de éxito y el número de ambigüedades resolubles de forma fiable dependen mucho del orden de resolución elegido. La optimización del orden de resolución llega a ser especialmente importante para geometrías con un gran número de satélites visibles. Un inconveniente de la resolución secuencial de ambigüedades (remuestreo) es que la tasa de éxito es ligeramente inferior que para la estimación de mínimos cuadrados enteros.
El tercer enfoque, la estimación de mínimos cuadrados enteros, maximiza la tasa de éxito para mediciones sin sesgo e incluye una descorrelación de enteros que permite una búsqueda muy eficiente. Una desventaja de la estimación de mínimos cuadrados enteros es la carencia de una expresión analítica para la tasa de éxito. Solo puede ser objeto de aproximación por medio de exhaustivas simulaciones de Montecarlo. Además, la estimación de mínimos cuadrados enteros solo es óptima en ausencia de sesgos.
La tasa de éxito de la resolución de ambigüedades depende sustancialmente de los sesgos residuales. Se sabe que estos sesgos degradan significativamente la tasa de éxito, aunque hasta ahora no se haya realizado un análisis cuantitativo. Además, la resolución general (remuestreo) de uso generalizado usa un orden de resolución que maximiza la fiabilidad de la primera resolución (es decir, la menor varianza en la solución de coma flotante) . Después de esta primera resolución, se actualiza la solución de coma flotante y se selecciona la ambigüedad más fiable entre las restantes. Este procedimiento se repite hasta que se alcanza un umbral predefinido sobre la probabilidad de resolución errónea o se resuelven todas las ambigüedades. La desventaja de este procedimiento es que maximizar la fiabilidad de la primera resolución no maximiza el número de ambigüedades resolubles de manera fiable. Además, pueden implementarse otros procedimientos, por ejemplo el redondeo síncrono, la estimación de mínimos cuadrados enteros o la estimación de aperturas de enteros, pero adolecen de una gran carga de cálculo para la evaluación de la tasa de éxito. Se determina mediante un gran número de simulaciones de Montecarlo para lograr estimaciones fiables de la probabilidad de resolución errónea, que es del orden de 10-9.
Partiendo de esta técnica relacionada, la presente invención busca proporcionar un procedimiento mejorado para los errores y proporcionar un sistema usuario que implementa el procedimiento.
Este objeto se logra por medio de un procedimiento que tiene las características de la reivindicación... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para determinar componentes de fase de señales portadoras (3) emitidas por satélites (2) de un sistema (1) de navegación por satélite, que comprende las acciones:
-un sistema usuario (5) recibe las señales portadoras (3) procedentes de diversos satélites
-las ambigüedades enteras de fase de las señales portadoras (3) recibidas de los satélites (2) son resueltas por medio de una resolución parcial de ambigüedades usando un orden secuencial seleccionado según un criterio de optimización
caracterizado porque
-el criterio de optimización es el número máximo de ambigüedades de fase que puede ser resuelto por la resolución parcial de ambigüedades, porque
-el número de ambigüedades de fase resolubles se maximiza seleccionando el orden secuencial usando un requisito predefinido sobre la probabilidad de resolución errónea de ambigüedades de fase, y porque
-la probabilidad de resolución errónea se calcula usando una cota superior predefinida de los sesgos ambientales de medición.
2. El procedimiento según la Reivindicación 1 en el que la resolución de las ambigüedades de fase depende de información sobre los sesgos instrumentales de código y fase, que han sido determinados previamente:
-midiendo (17) la señal de fase y código mediante una pluralidad de estaciones (10) de referencia;
-llevando a cabo una estimación (18) de mínimos cuadrados de distancias lineales independientes, errores ionosféricos, sesgos del receptor y sesgos de los satélites para al menos dos épocas;
-llevando a cabo una estimación (19) de valor real de la ambigüedad usando un filtro de Kalman inicializado por la estimación previa de mínimos cuadrados de distancias, errores ionosféricos, sesgos del receptor y sesgos de los satélites e inicializado además por las velocidades de variación de la distancia, que se han calculado a partir de una diferencia de la distancia estimada de épocas diferentes;
-determinando (20) secuencialmente las ambigüedades de valor entero en función de las ambigüedades de valor real estimadas previamente una vez que la probabilidad de resolución errónea cae por debajo de un umbral predefinido;
-llevando a cabo una estimación (21) de sesgos de receptor y sesgos de satélite para las mediciones tanto de código como de fase usando un filtro de Kalman inicializado por la estimación previa de distancias, velocidades de variación de la distancia, errores ionosféricos, sesgos del receptor y sesgos de los satélites y valores predefinidos para los sesgos no resueltos linealmente dependientes de receptor y satélites.
3. El procedimiento según la Reivindicación 2
en el que MR sesgos de receptor, M (K-1) sesgos de satélite y MKR - MR - M (K-1) ambigüedades son linealmente independientes para un número M de frecuencias, un número K de satélites y un número R de receptores.
4. El procedimiento según una cualquiera de las Reivindicaciones 1 a 3
en el que las ambigüedades enteras de las señales portadoras recibidas por el sistema usuario (5) se determinan en función de sesgos determinados previamente.
5. El procedimiento según una cualquiera de las Reivindicaciones 1 a 4
en el que la selección del orden secuencial se efectúa:
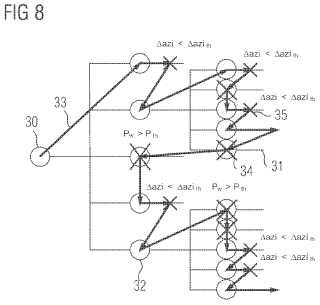
-usando un árbol (29) de búsqueda para determinar el orden secuencial, comprendiendo el árbol (29) de búsqueda una pluralidad de ramas (31) que representan diversos órdenes secuenciales de los satélites (2) que están dispuestos a lo largo de las ramas (31) del árbol (29) de búsqueda;
-determinando la longitud de la rama (31) determinando la probabilidad de resolución errónea para cada nodo del árbol (29) de búsqueda, finalizando la búsqueda a lo largo de la rama (31) del árbol (29) de búsqueda si la probabilidad de resolución errónea supera un límite preestablecido, y dependiendo la longitud de una rama
particular (31) del número de nodos (32) por los que se ha pasado hasta que finalice la búsqueda a lo largo de una rama (31) ; y
-seleccionando el orden secuencial asociado con la rama (31) que tenga la mayor longitud.
6. El procedimiento según la Reivindicación 5
en el que la selección del orden secuencial se lleva a cabo suponiendo una acumulación unidireccional de sesgos ambientales desde los satélites seleccionados (2) y un perfil exponencial, dependiente de la elevación, de las magnitudes de los sesgos.
7. El procedimiento según una cualquiera de las Reivindicaciones 1 a 6
en el que la selección (22) del orden secuencial se lleva a cabo sin descorrelación, con descorrelación parcial o total de las ambigüedades de coma flotante.
8. El procedimiento según una cualquiera de las Reivindicaciones 1 a 7
en el que la selección (22) del orden secuencial se lleva a cabo con la restricción de que la separación acimutal entre los satélites (2) de resoluciones subsiguientes de las ambigüedades de fase supere un límite inferior preestablecido y/o en la que el límite inferior se reduzca con el número de nodos (32) verificados a lo largo de una rama (31) del árbol (29) de búsqueda.
9. El procedimiento según una cualquiera de las Reivindicaciones 1 a 8
en el que las señales portadoras recibidas y señales adicionales de código recibidas se combinan (23) en una combinación multifrecuencia, conservadora de la geometría, sin efecto ionosférico, conservadora de enteros de código-portadora y una combinación multifrecuencia, conservadora de la geometría, sin efecto ionosférico solo de códigos para la resolución secuencial (25) de las ambigüedades de fase.
10. El procedimiento según la Reivindicación 9
en el que la combinación multifrecuencia de código-portadora y la combinación solo de códigos son aplanadas (24) por una combinación multifrecuencia solo de portadoras, resultando en una combinación multifrecuencia aplanada de código-portadora y una combinación solo de códigos para la resolución secuencial (25) de las ambigüedades de fase.
11. El procedimiento según la Reivindicación 10
en el que los coeficientes de ponderación de la combinación conservadora de la geometría, sin efecto ionosférico, conservadora de enteros de código-portadora se seleccionan maximizando la relación entre la longitud de onda y la desviación típica de la combinación aplanada de código-portadora para la resolución secuencial (25) de las ambigüedades de fase.
12. El procedimiento según una cualquiera de las Reivindicaciones 9 a 11
en el que las ambigüedades resueltas se validan usando ambigüedades obtenidas a partir de una combinación multifrecuencia, sin geometría, sin efecto ionosférico de portadora aplanada de código-portadora.
13. El procedimiento según una cualquiera de las Reivindicaciones 9 a 12
en el que las ambigüedades de fase resueltas son eliminadas (27) de una combinación mixta sin geometría, conservadora del efecto ionosférico, conservadora de enteros de código-portadora de señales multifrecuencia de código y portadora que comprende la misma combinación de ambigüedades que la combinación conservadora de la geometría, sin efecto ionosférico, conservadora de enteros de código-portadora.
14. El procedimiento según la Reivindicación 13
en el que la combinación multifrecuencia mixta sin geometría, conservadora del efecto ionosférico, conservadora de enteros de código-portadora es aplanada (28) por una combinación multifrecuencia solo de portadoras resultante en una combinación multifrecuencia aplanada de código-portadora.
15. El procedimiento según la Reivindicación 14
en el que los coeficientes de ponderación de la combinación sin geometría, conservadora del efecto ionosférico, conservadora de enteros de código-portadora se seleccionan maximizando la relación entre la longitud de onda y la desviación típica de la combinación aplanada de código-portadora que comprende la
misma combinación de ambigüedades que la combinación conservadora de la geometría, sin efecto ionosférico, conservadora de enteros de código-portadora.
16. Un sistema usuario de navegación caracterizado porque el sistema usuario está dispuesto para realizar el procedimiento según una cualquiera de las Reivindicaciones 1 a 15.
Patentes similares o relacionadas:
Procedimiento y sistema de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras emitidas por satélites y de correcciones ionosféricas, del 8 de Febrero de 2017, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Procedimiento de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras de primera, segunda y tercera frecuencias distintas, de valores […]
Método, aparato y sistema para la determinación de la ubicación de un objeto, que tiene un receptor de Sistema global de navegación por satélite mediante el procesamiento de datos no diferenciados como mediciones de la fase de la portadora y productos externos tales como datos de la ionosfera, del 11 de Mayo de 2016, de European Space Agency (ESA): Método para la determinación de una ubicación de un objeto, que tiene un receptor de Sistema global de navegación por satélite (GNSS), comprendiendo el método […]
 Dispositivo de seguimiento de señales de radionavegación, del 11 de Noviembre de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110'), que comprende una primera etapa de seguimiento de una primera señal de radionavegación […]
Dispositivo de seguimiento de señales de radionavegación, del 11 de Noviembre de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110'), que comprende una primera etapa de seguimiento de una primera señal de radionavegación […]
 Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
Tratamiento de señales de radionavegación utilizando una combinación widelane, del 24 de Abril de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de tratamiento de señales de radionavegación procedentes de un conjunto de satélites, del quecada satélite difunde por lo menos una primera […]
 Procedimiento para procesar un conjunto de señales de un sistema global de satélites de navegación con al menos tres portadores, del 6 de Febrero de 2013, de DLR DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Un procedimiento para procesar un conjunto de señales de navegación de un sistema global de satélitesde navegación con al menos tres señales portadoras […]
Procedimiento para procesar un conjunto de señales de un sistema global de satélites de navegación con al menos tres portadores, del 6 de Febrero de 2013, de DLR DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Un procedimiento para procesar un conjunto de señales de navegación de un sistema global de satélitesde navegación con al menos tres señales portadoras […]