Procedimiento de geoposicionamiento que utiliza datos de asistencia.
Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación (16,
18, 20), de los cuales cada uno difunde por lomenos una primera señal de radionavegación (22) en una primera frecuencia y una segunda señal deradionavegación (24) en una segunda frecuencia distinta de la primera, comprendiendo el procedimiento lasacciones siguientes:
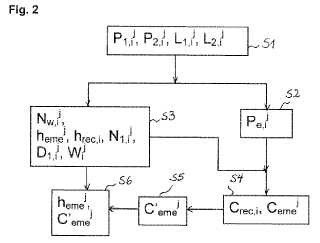
recibir unas mediciones de código y de fase de dichas señales de radionavegación realizadas por unosreceptores de una red de referencia (10, 12, 14); presentando cada una de dichas mediciones de fase unaambigüedad de un número entero de ciclos a priori desconocido (S1);
resolver las ambigüedades de las mediciones de fase en la primera frecuencia de manera coherente sobre elconjunto de los satélites y de los receptores de referencia (S3);
deducir un conjunto de valores de reloj emisor iono-free de fase que se desprenden de la resolución coherentede dichas ambigüedades y un conjunto de valores de reloj receptor iono-free de fase que se desprenden de laresolución coherente de dichas ambigüedades (S3);
caracterizado porque comprende las acciones siguientes:
calcular, para cada par satélite-receptor de referencia, un valor de combinación de deslizamiento de códigoportadora, denominado asimismo combinación GRAPHIC y que utiliza la suma de la medición de fase y de lamedición de código, a partir de la medición de código y de la medición de fase realizada en este receptor dereferencia para este satélite en la primera frecuencia (S2), y restar de este valor la contribución geométrica, lacontribución de los valores de reloj receptor iono-free de fase y de reloj emisor iono-free de fase así como lacontribución de la ambigüedad de la medición de fase resuelta, de manera que se obtenga así un residuo demedición (S4);
separar de manera coherente sobre el conjunto de los satélites y de los receptores de la red cada uno de losresiduos de medición obtenidos en una parte emisor y en una parte receptor; y
alisar la parte emisor de dichos residuos de medición (S5).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/053129.
Solicitante: CENTRE NATIONAL D'ETUDES SPATIALES.
Nacionalidad solicitante: Francia.
Dirección: 2 Place Maurice Quentin 75039 Paris FRANCIA.
Inventor/es: MERCIER, FLAVIEN, LAURICHESSE,DENIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando datos sobre la fase de la portadora.
- G01S19/43 G01S 19/00 […] › empleando medidas de fase de la portadora, p. ej. posicionamiento cinemático; empleando interferometría de línea base larga o corta.
- G01S19/44 G01S 19/00 […] › Resolución de la ambigüedad de la fase de la portadora; Ambigüedad flotante; método LAMBDA [Least-squares AMBiguity Decorrelation Adjustment].
PDF original: ES-2425383_T3.pdf
Fragmento de la descripción:
Procedimiento de geoposicionamiento que utiliza datos de asistencia.
La presente invención se refiere al campo de la radionavegación o de posicionamiento por satélite, en particular a un procedimiento de geoposicionamiento que utiliza datos de asistencia calculados con la ayuda de una red de receptores de referencia. La invención se refiere además a un procedimiento para calcular los datos de asistencia requeridos. El campo de aplicación de la invención es, en particular, la recepción de señales de radionavegación emitidas por unos emisores de un sistema de posicionamiento por satélite, por ejemplo GPS (del inglés "Global Positioning System") , Galileo, Glonass, QZSS, Compass, IRNSS, etc.
Estado de la técnica
De manera general, las señales de radionavegación emitidas por satélites (o pseudolitos) de un sistema de posicionamiento se presentan en forma de una portadora modulada por una forma de onda de esparcimiento que contiene un código binario pseudo-aleatorio. Ya que la modulación de la portadora provoca el esparcimiento del espectro alrededor de la frecuencia de la portadora, las señales de radionavegación se denominan frecuentemente "en espectro ensanchado". Los códigos pseudo-aleatorios representan un identificador de la señal y por lo tanto del satélite emisor. Conocidos por los receptores, les permiten un Acceso Múltiple por División de Código (AMDC) . Opcionalmente, ciertas señales de posicionamiento por satélite pueden transportar también datos útiles (por ejemplo el mensaje de navegación) en forma de una secuencia binaria (con ritmo claramente menos elevado que el código pseudo-aleatorio) modulada además sobre la portadora.
En el caso de GPS, las señales de radionavegación son trasmitidas en las bandas de frecuencias L1, centrada en 1575, 42 MHz y L2, centrada en 1227, 6 MHz. Durante la modernización de GPS, se añadirá la banda L5, centrada en 1176, 45 MHz. Los satélites de la constelación Galileo transmitirán en las bandas E2-L1-E1 (siendo la porción de banda mediana L1 la misma que la del GPS) , E5a (que, según la nomenclatura Galileo, representa la banda L5 prevista para el GPS) , E5b (centrada en 1207, 14 MHz) y E6 (centrada en 1278, 75 MHz) . Se observará que los satélites de la constelación Compass transmiten o transmitirán en la banda B1 (centrada en 1561, 098 MHz) , B1-2 (centrada en 1587, 742 MHz) , L1 (centrada en 1575, 42 MHz) , B2 (centrada en 1207, 14 MHz) , y B3 (centrada en 1268, 52 MHz) . Las frecuencias centrales representan las frecuencias de las portadoras de las diferentes señales.
La recepción de una señal de radionavegación comprende normalmente una primera desmodulación con la ayuda de una réplica interna de la portadora generada en el receptor por un oscilador pilotado por un bucle de seguimiento de portadora y una segunda desmodulación con la ayuda de una réplica interna de la forma de onda de esparcimiento producida por un generador de forma de onda pilotado por un bucle de seguimiento de forma de onda de esparcimiento (también denominado "bucle de seguimiento de código") . Las señales de condicionamiento de los bucles de seguimiento de portadora y de forma de onda de esparcimiento son utilizadas por el receptor para determinar su posición. La señal de separación de fase entre la portadora de la señal recibida y la réplica interna de portadora producida a cada paso de tiempo por el bucle de seguimiento de portadora proporciona una primera observable (la observable o medición de fase) . La señal de desfase temporal entre la forma de onda de esparcimiento de la señal recibida y la réplica interna en forma de onda de esparcimiento producida a cada paso de tiempo por el bucle de seguimiento de forma de onda de esparcimiento representa una segunda observable (la observable o medición de código) .
Las mediciones elementales que puede efectuar un receptor comprenden por lo tanto las mediciones de código y las mediciones de fase de portadora. Evidentemente, estas mediciones elementales se pueden combinar entre sí. Las mediciones de código son de una precisión métrica mientras que las mediciones de fase son de una precisión de algunos mm. Ahora bien, las mediciones de fase adolecen de la desventaja de que suministran sólo la parte real de la diferencia de fase de la portadora entre la emisión por el satélite y el receptor. Las mediciones de fase son por lo tanto ambiguas en el sentido en el que al principio se desconoce el número de ciclos enteros entre el emisor (satélite) y el receptor. Con el fin de poder aprovechar la precisión de las mediciones de fase, un receptor debe resolver las ambigüedades de las que están afectadas.
La resolución de las ambigüedades de fase se efectúa habitualmente por diferenciación de las mediciones de fase (simple o doble diferenciación) . Esta diferenciación permite eliminar unas causas de errores (no modelizadas) comunes a varias mediciones, y permite así hacer desaparecer una información entera, que si se toma en cuenta mejora aún más los rendimientos. Sin embargo, esta información entera consiste en diferencias de una o varias ambigüedades de fase elementales y no permite, en general, volver a las ambigüedades de fase elementales.
La solicitud de patente FR 2 914 430 describe un procedimiento que permite resolver, de manera coherente, las ambigüedades de fase sobre una red de receptores de referencia con la ayuda de observaciones bi-frecuencia (es decir mediciones de código y de fase sobre por lo menos dos frecuencias distintas) . En paralelo, este procedimiento produce un juego de relojes de satélite que pueden ser utilizados como datos de asistencia por un receptor bifrecuencia exterior a la red (por ejemplo el de un usuario que desea conocer su posición) . Estos relojes tienen la propiedad particular de poner en evidencia unas ambigüedades de fase totales durante la resolución de las ecuaciones de posicionamiento obtenidas por unas mediciones "elementales", es decir diferenciadas ni entre satélites ni entre receptores. El inconveniente del procedimiento de la solicitud FR 2 914 430 es que puede ser aplicado sólo por unos receptores bi-frecuencia. El artículo "Real-time Precise Point Positioning Using Single Frequency Data", por K. Chen y Y. Gao (Ion GNSS 18th International Technical Meeting of the Satellite Division, 1315 de septiembre de 2005, Long Beach, CA) evalúa y compara varios métodos para mitigar el efecto ionosférico. El artículo menciona, entre otros, un método para eliminar la contribución ionosférica con la ayuda de la combinación de deslizamiento código portadora (o combinación GRAPHIC) . Este método ha sido descrito anteriormente por P. Héroux et al. en el artículo "Products and Applications for Precise Point Positioning-Moving Towards Real-Time" (ION GNSS 17th International Technical Meeting of the Satellite Division, 21-24 de septiembre de 2004, Long Beach, CA) .
Objeto de la invención Un primer aspecto de la presente invención tiene como objetivo proponer un procedimiento de geoposicionamiento que permite que un receptor anule sus ambigüedades de fase sin recurrir necesariamente a observaciones multifrecuencia. Un segundo aspecto de la invención tiene como objetivo proponer un procedimiento para determinar los datos de asistencia requeridos para dicho procedimiento de geoposicionamiento.
Descripción general de la invención De manera general, la invención comprende dos aspectos. Por un lado, comprende un procedimiento que se desarrolla a nivel de una red de receptores (estaciones) de referencia durante el cual se determinan unas informaciones suplementarias (datos de asistencia) con la ayuda de las cuales un receptor de usuario que no forma parte de la red puede resolver las ambigüedades de fase. Por otro lado, la invención comprende el procedimiento que se desarrolla a nivel de un receptor que no forma parte necesariamente de la red que utiliza las informaciones suplementarias elaboradas con la ayuda de la red de estaciones de referencia y puestas a disposición por una vía de comunicación cualquiera.
En aras de la claridad, el procedimiento de determinación de datos de asistencia se tratará en primer lugar. En la continuación de la descripción, se supondrá que las señales de radionavegación proceden de un conjunto de satélites de radionavegación, cada uno de los cuales difunde por lo menos una primera señal de radionavegación en una primera frecuencia y una segunda señal de radionavegación en una segunda frecuencia distinta de la primera.
El procedimiento de determinación de datos de asistencia comprende las acciones de:
Reivindicaciones:
1. Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegación que proceden de un conjunto de satélites de radionavegación (16, 18, 20) , de los cuales cada uno difunde por lo menos una primera señal de radionavegación (22) en una primera frecuencia y una segunda señal de radionavegación (24) en una segunda frecuencia distinta de la primera, comprendiendo el procedimiento las acciones siguientes:
recibir unas mediciones de código y de fase de dichas señales de radionavegación realizadas por unos receptores de una red de referencia (10, 12, 14) ; presentando cada una de dichas mediciones de fase una ambigüedad de un número entero de ciclos a priori desconocido (S1) ;
resolver las ambigüedades de las mediciones de fase en la primera frecuencia de manera coherente sobre el conjunto de los satélites y de los receptores de referencia (S3) ;
deducir un conjunto de valores de reloj emisor iono-free de fase que se desprenden de la resolución coherente de dichas ambigüedades y un conjunto de valores de reloj receptor iono-free de fase que se desprenden de la resolución coherente de dichas ambigüedades (S3) ;
caracterizado porque comprende las acciones siguientes:
calcular, para cada par satélite-receptor de referencia, un valor de combinación de deslizamiento de código portadora, denominado asimismo combinación GRAPHIC y que utiliza la suma de la medición de fase y de la medición de código, a partir de la medición de código y de la medición de fase realizada en este receptor de referencia para este satélite en la primera frecuencia (S2) , y restar de este valor la contribución geométrica, la contribución de los valores de reloj receptor iono-free de fase y de reloj emisor iono-free de fase así como la contribución de la ambigüedad de la medición de fase resuelta, de manera que se obtenga así un residuo de medición (S4) ;
separar de manera coherente sobre el conjunto de los satélites y de los receptores de la red cada uno de los residuos de medición obtenidos en una parte emisor y en una parte receptor; y
alisar la parte emisor de dichos residuos de medición (S5) .
2. Procedimiento según la reivindicación 1, en el que los valores de reloj emisor iono-free asociados a la resolución coherente de las ambigüedades así como las partes emisor alisadas de dichos residuos de medición se ponen a disposición de los receptores exteriores a la red como datos de asistencia.
3. Procedimiento según la reivindicación 1 o 2, que comprende, para cada satélite (16, 18, 20) de dicho conjunto de satélites, la acción de calcular un valor de reloj emisor asociado a la combinación de deslizamiento código portadora como suma del valor de reloj emisor iono-free y del residuo de medición alisado.
4. Procedimiento según la reivindicación 3, en el que dichos valores de reloj emisor asociado a la combinación de
deslizamiento código portadora se ponen a disposición de receptores exteriores a la red como datos de asistencia. 45
5. Procedimiento según la reivindicación 2 o 4, en el que dicha puesta a disposición se efectúa por una vía de telecomunicación.
6. Procedimiento según cualquiera de las reivindicaciones 1 a 5, en el que el alisado de las partes emisor de dichos residuos de medición se realiza cada vez por ajuste de una función seno de un periodo de 12 horas.
7. Producto de programa de ordenador que comprende unos medios de soporte que soportan un código de programa de ordenador configurado para realizar el procedimiento según cualquiera de las reivindicaciones 1 a 6, cuando se ejecuta en un ordenador.
8. Procedimiento de geoposicionamiento por señales de radionavegación que proceden de un conjunto de satélites (16, 18, 20) , de los cuales cada satélite difunde por lo menos una primera señal de radionavegación (22) en una primera frecuencia y una segunda señal de radionavegación (24) en una segunda frecuencia distinta de la primera, comprendiendo dicho procedimiento, a nivel de un receptor de señales de radionavegación, las acciones siguientes:
recibir, para cada satélite de dicho conjunto y visible desde dicho receptor, por lo menos dicha primera señal de radionavegación;
efectuar, para cada satélite visible, unas mediciones de código y de fase de la primera señal de radionavegacón 65 recibida; presentando dichas mediciones de fase una ambigüedad de un número entero de ciclos a priori desconocido (S7) ;
recibir un conjunto de datos de asistencia (S8) ;
estando el procedimiento caracterizado
porque el conjunto de datos de asistencia comprende, para cada satélite del conjunto de satélites, unos datos suficientes para reconstituir el valor de reloj emisor asociado a la combinación de deslizamiento código portadora, también denominado GRAPHIC que utiliza la suma de la medición de fase y de la medición de código, deducido de manera coherente sobre el conjunto de satélites (16, 18, 20) y de receptores de una red de referencia (10, 12, 14) ; y
porque comprende las acciones siguientes:
calcular, para cada satélite, un valor de combinación de deslizamiento de código portadora a partir de la medición de código y de la medición de fase de la primera señal de radionavegación, y restar de este valor de combinación de deslizamiento de código portadora el valor de reloj emisor asociado a la combinación de deslizamiento código portadora, de manera que se obtenga así una observable de deslizamiento código portadora no ambigua; y
determinar la posición del receptor con la ayuda de las observables de deslizamiento código portadora no 20 ambiguas (S10) .
9. Procedimiento según la reivindicación 8, en el que los datos suficientes para reconstituir el valor de reloj emisor asociado a la combinación de deslizamiento código portadora comprenden el valor de reloj de satélite asociado a la combinación de deslizamiento código portadora.
10. Procedimiento según la reivindicación 8, en el que los datos suficientes para reconstituir el valor de reloj emisor asociado a la combinación de deslizamiento código portadora comprenden los valores de reloj emisor iono-free de fase asociados a la resolución coherente de las ambigüedades así como las partes emisor alisadas de dichos residuos de medición obtenidas mediante un procedimiento según cualquiera de las reivindicaciones 1 a 6.
11. Procedimiento según cualquiera de las reivindicaciones 1 a 6 u 8 a 10, en el que la primera frecuencia se selecciona de entre 1575, 42 MHz, 1227, 6 MHz, 1176, 45 MHz, 1207, 14 MHz, 1278, 75 MHz, 1561, 098 MHz, 1589, 742 MHz, 1207, 14 MHz o 1268, 52 MHz.
12. Producto de programa de ordenador que comprende unos medios de soporte que soportan un código de programa de ordenador configurado para realizar el procedimiento según cualquiera de las reivindicaciones 8 a 10 cuando se ejecuta en un ordenador.
13. Receptor GNSS configurado para realizar el procedimiento según cualquiera de las reivindicaciones 8 a 10. 40
Patentes similares o relacionadas:
Método PPP-RTK y sistema para la determinación de posición a base de señal de GNSS, del 17 de Agosto de 2016, de Fugro N.V: Método para el cálculo de correcciones de GNSS para la transmisión a un móvil , utilizando un sistema de corrección de señales de GNS que comprende una estación […]
Coherencia de frecuencia en una red de localización, del 22 de Abril de 2015, de QX CORPORATION PTY LTD: Un método para el seguimiento de la frecuencia de bucle abierto del componente portador de una señal de posicionamiento de referencia recibida en […]
Localización de un receptor de posición itinerante en una red de localización, del 22 de Abril de 2015, de QX CORPORATION PTY LTD: Un método para determinar la posición de un receptor de posición itinerante en un sistema de posicionamiento que comprende al menos un transmisor de […]
Operación inter-red de redes de localización múltiples, del 7 de Enero de 2015, de QX CORPORATION PTY LTD: Un método para permitir a un receptor de posición determinar soluciones de posición a partir de señales de posicionamiento (803-1, 803-2, 803-3, […]
 Método y dispositivo para la sincronización cronológica de una red de ubicación, del 14 de Noviembre de 2013, de QX CORPORATION PTY LTD: Un método para sincronizar cronológicamente, en un sistema para permitir la determinación de la posiciónde un receptor de posición itinerante , una señal de […]
Método y dispositivo para la sincronización cronológica de una red de ubicación, del 14 de Noviembre de 2013, de QX CORPORATION PTY LTD: Un método para sincronizar cronológicamente, en un sistema para permitir la determinación de la posiciónde un receptor de posición itinerante , una señal de […]
 SOPORTE DE LOCALIZACION RELATIVA, del 2 de Septiembre de 2010, de NOKIA CORPORATION: Un procedimiento que comprende:
recibir al menos un conjunto de datos sobre señales satelitales desde al menos un primer receptor del sistema […]
SOPORTE DE LOCALIZACION RELATIVA, del 2 de Septiembre de 2010, de NOKIA CORPORATION: Un procedimiento que comprende:
recibir al menos un conjunto de datos sobre señales satelitales desde al menos un primer receptor del sistema […]
Sistema y método para encontrar una ubicación utilizando señales de comunicación, del 3 de Diciembre de 2014, de Exelis Inc. (100.0%): Un método para localizar un objeto utilizando señales de GPS que comprende la etapa de recibir señales de GPS desde un transmisor de señal de GPS en un receptor […]
 POSICIONAMIENTO USANDO UNA ESTACIÓN DE REFERENCIA, del 27 de Mayo de 2011, de NOKIA CORPORATION: Un procedimiento que comprende: usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una […]
POSICIONAMIENTO USANDO UNA ESTACIÓN DE REFERENCIA, del 27 de Mayo de 2011, de NOKIA CORPORATION: Un procedimiento que comprende: usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una […]