Procedimiento y sistema de medición y seguimiento automáticos de troncos, madera industrial y tablones.
Un procedimiento para realizar un seguimiento de un tronco de madera durante un proceso de adquisición demadera,
en el que los troncos de madera son transportados desde una ubicación geográfica, comprendiendo elprocedimiento las etapas de:
- estimar la ubicación geográfica de los troncos de madera usando GPS,
- manipular un primer lote de dichos troncos y tomar al menos una primera imagen estéreo de dicho primerlote de troncos durante su manipulación,
- determinar, a partir de la al menos una primera imagen estéreo del primer lote de troncos, datoscaracterísticos de los troncos del primer lote que permitan identificar cada tronco de madera,
- transportar una pluralidad de troncos, cuya ubicación geográfica y datos característicos han sidodeterminados, desde su ubicación geográfica hasta una ubicación geográfica subsiguiente en el procesode adquisición de madera,
- manipular, en la ubicación geográfica subsiguiente, un segundo lote de troncos que comprende al menosuno de dicha pluralidad de troncos y siendo visible al menos una parte de cada tronco, incluyendo lamanipulación:
- tomar al menos una segunda imagen estéreo del segundo lote de troncos, e
- identificar, a partir de la al menos una segunda imagen estéreo del segundo lote de troncos, cadatronco del segundo lote, realizándose de este modo un seguimiento de cada tronco identificado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DK2003/000561.
Solicitante: DRALLE A/S.
Nacionalidad solicitante: Dinamarca.
Dirección: Venlighedsvej 4 2970 Hørsholm DINAMARCA.
Inventor/es: DRALLE,KIM, TARP-JOHANSEN,MADS JEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01G23/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01G HORTICULTURA; CULTIVO DE HORTALIZAS, FLORES, ARROZ, FRUTOS, VID, LÚPULO O ALGAS; SILVICULTURA; RIEGO (recolección de frutas, verduras, lúpulo o productos similares A01D 46/00; crecimiento de algas unicelulares C12N 1/12). › Silvicultura.
- G01B11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
PDF original: ES-2447418_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de medición y seguimiento automáticos de troncos, madera industrial y tablones Campo de la invención Esta invención se refiere a la medición y el seguimiento de objetos mediante el uso de procedimientos fotogramétricos. La invención aborda la situación en la que lotes de tales objetos se manipulan para agruparse en lotes más grandes o para el procesamiento adicional de objetos individuales. Durante esta acción, los objetos individuales de un pequeño lote serán visibles en gran medida. En su simplicidad, la idea es que mediante metodologías fotogramétricas se obtenga información de un objeto particular a partir de las imágenes de uno o más pequeños lotes en los que aparece. Más específicamente, se extrae la extensión tridimensional (3D) de un objeto y las propiedades relacionadas con su superficie, tales como la textura y otras características importantes. Capturar imágenes mientras se agarran y se sueltan los pequeños lotes y/o en puntos sucesivos de la manipulación proporciona la información necesaria para realizar un seguimiento de la trayectoria de transporte en el tiempo y en el espacio de cada objeto individual. Por tanto, la metodología proporciona en su conjunto mediciones y el seguimiento de los objetos individuales.
Por tanto, la invención abarca un amplio abanico de posibles aplicaciones. Un ejemplo genérico es un proceso industrial en el que un artículo pasa por varias etapas de subprocesos durante su fabricación. En este caso, la memoria descriptiva se centra en un único diseño para su uso en la silvicultura y en la industria de procesamiento de la madera.
En las últimas décadas, la silvicultura ha experimentado un alto grado de mecanización. En la actualidad, la madera se recoge y se procesa a una velocidad cada vez mayor y las industrias de la madera producen grandes unidades. Además, la maquinaria usada aplica tecnologías altamente desarrolladas. De manera generalizada, la maquinaria para la tala y las sierras de los aserraderos están equipadas con diversa tecnología informática que ayuda al software a optimizar cada etapa del proceso de adquisición. Al mismo tiempo, cada vez hay una mayor conciencia social acerca de la gestión de los recursos naturales y de la utilización de los recursos que se recogen. En general se reconoce que los futuros avances relacionados con el procesamiento de la madera deben obtenerse a partir de más mejoras en el proceso de adquisición de la madera. La presente invención aporta optimizaciones en todo el proceso de adquisición de la madera proporcionando información detallada de la madera (objetos) en cualquier fase en la que se aplique el sistema.
Sección general
La presente invención es un sistema informático de visión y seguimiento en tiempo real para localizar de manera automática y medir el tamaño y la calidad de troncos individuales de madera dura y blanda, piezas de madera industrial y tablones, en lo sucesivo troncos.
Este sistema tiene como objetivo racionalizar y aumentar la eficacia y la precisión de las mediciones en todo el proceso de adquisición de madera. Además, el preciso seguimiento de los troncos permite una documentación precisa para obtener, por ejemplo, la certificación de la madera.
Por sistema de visión informático se entiende un único o una serie de sistemas de detección informáticos con GPS integrado. El sistema de visión localiza y mide los troncos en varias fases de algún proceso de adquisición de madera. Los resultados de una o más de estas mediciones se usarán de manera independiente o conjunta para proporcionar estimaciones precisas y no sesgadas de la posición, el tamaño y la calidad de los troncos en cualquier fase específica.
Por seguimiento se entiende un registro de las posiciones de un tronco reconocido a lo largo del proceso de adquisición en el que se aplica el sistema, por ejemplo las posiciones de un tronco específico desde su tala hasta cualquier fase del proceso de adquisición en la que ya no se aplique el sistema.
El sistema satisfará diversas demandas inmediatas de información sobre varios actores a lo largo del proceso de adquisición. En particular: i) los compradores y los vendedores exigen unidades comerciales medidas y clasificadas de manera precisa y documentación sobre las mismas y ii) la necesidad de devolver troncos y otros artículos de madera a su origen en el bosque con fines de certificación.
Además, la información recopilada por el sistema hasta cualquier fase (operación) dada del proceso de adquisición puede utilizarse con fines de optimización en fases posteriores del proceso de adquisición. Esto aumenta la eficacia del proceso de adquisición.
Una representación esquemática del proceso de adquisición de madera se muestra en la Figura 1. El patrón de acciones de troncos que se cargan y descargan mediante dispositivos similares, por ejemplo grúas, se repite en
todas las operaciones del proceso de adquisición. Por lo tanto, el sistema está diseñado para aplicar sistemas informáticos de detección similares y algoritmos similares de análisis de imágenes en todas las fases.
Normalmente, los troncos se manipulan en una o más de las operaciones mostradas en la Figura 1. Por tanto, la unidad que va a manipularse es un conjunto variable de troncos y el sistema está diseñado para calcular valores agregados para tales conjuntos de troncos.
El sistema puede aplicarse en cualquier acción o conjunto de acciones, por ejemplo una operación mostrada en la Figura 1. Por consiguiente, los compradores y los vendedores tienen la responsabilidad de decidir las etapas en las que será apropiado aplicar el sistema. Devolver las tablas a su origen en el bosque requiere naturalmente que el sistema se aplique en la mayoría de puntos (acciones) de carga y descarga.
La presente invención sugiere la medición de troncos individuales usando un sistema de visión en estéreo integrado con GPS. El sistema GPS proporciona la ubicación en el espacio de los equipos y manipula los troncos y el sistema de visión. En combinación con el reconocimiento automático de los troncos en las imágenes capturadas por el sistema de visión, la trayectoria de cada tronco individual puede correlacionarse para proporcionar el seguimiento de los troncos.
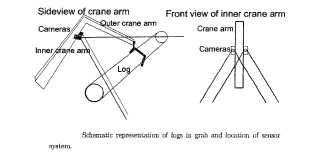
La idea central del sistema de visión es que captura imágenes de troncos durante las acciones de carga/descarga. Durante estas acciones, una grúa o dispositivo similar solo manipula a la vez algunos troncos. Las imágenes de un lote de algunos troncos permiten un reconocimiento completo de cada tronco individual del lote. Los puntos de montaje candidatos del sistema de visión son, por ejemplo, la cuchara de una máquina de recogida o una máquina de traslado, la carrocería de una máquina de recogida o una máquina de traslado, un camión en la planta, una cinta transportadora o cualquier otra ubicación en la que los troncos puedan ser visualizados con el sistema de visión.
Además, las imágenes de los apilados (conjuntos de troncos) que están cargándose o descargándose se capturan de manera continua para controlar la ubicación exacta en la que se deposita o de la que se extrae cada lote de troncos. De esta manera, los apilados se consideran agrupaciones de troncos individuales con sus propiedades individuales, tales como la trayectoria de transporte y el tamaño. Por tanto, pueden calcularse cantidades agregadas y estadísticas de distribución a nivel de apilado para caracterizar un apilado.
La idea de medir troncos sobre la marcha mediante una detección remota y la de concebir los apilados como agrupaciones de troncos con un registro de información asociado a nivel de tronco es una ventaja en comparación con las prácticas actuales. Las prácticas habituales consisten en medir apilados en un proceso aparte y caracterizar los apilados por sus medidas externas y otras cantidades agregadas.
Cada tronco individual se supervisa varias veces durante la línea de adquisición. En cualquier imagen estéreo de acción de carga/descarga de cada tronco ubicado en el apilado de descarga, la grúa y el apilado de carga quedan capturados. Esta fuente de información global forma la base de un algoritmo de análisis de imágenes para estimar el tamaño y la ubicación de los troncos con un alto nivel de precisión. Integrar las imágenes de las diversas operaciones de la Figura 1 en el análisis de las imágenes mejora el nivel de precisión que puede obtenerse.
El algoritmo de análisis de imágenes está diseñado para adoptar información procedente de muchas fuentes. Por tanto, el algoritmo permite fusionar datos procedentes de fuentes tales como un inventario del terreno, una máquina de recogida, información regional... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para realizar un seguimiento de un tronco de madera durante un proceso de adquisición de madera, en el que los troncos de madera son transportados desde una ubicación geográfica, comprendiendo el procedimiento las etapas de:
- estimar la ubicación geográfica de los troncos de madera usando GPS, -manipular un primer lote de dichos troncos y tomar al menos una primera imagen estéreo de dicho primer lote de troncos durante su manipulación, -determinar, a partir de la al menos una primera imagen estéreo del primer lote de troncos, datos característicos de los troncos del primer lote que permitan identificar cada tronco de madera,
- transportar una pluralidad de troncos, cuya ubicación geográfica y datos característicos han sido determinados, desde su ubicación geográfica hasta una ubicación geográfica subsiguiente en el proceso de adquisición de madera,
-manipular, en la ubicación geográfica subsiguiente, un segundo lote de troncos que comprende al menos uno de dicha pluralidad de troncos y siendo visible al menos una parte de cada tronco, incluyendo la 15 manipulación:
-tomar al menos una segunda imagen estéreo del segundo lote de troncos, e -identificar, a partir de la al menos una segunda imagen estéreo del segundo lote de troncos, cada tronco del segundo lote, realizándose de este modo un seguimiento de cada tronco identificado.
2. El procedimiento según la reivindicación 1, en el que la ubicación geográfica es la ubicación de recogida.
3. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que los datos característicos incluyen el volumen de cada tronco individual.
4. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que los datos característicos incluyen la masa de cada tronco individual.
5. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que los datos característicos 25 incluyen la calidad de cada tronco individual.
6. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que los datos característicos incluyen la especie de cada tronco individual.
7. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que los datos característicos incluyen la curvatura del tronco.
8. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que los datos característicos incluyen la conicidad del tronco.
9. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que la manipulación incluye descargar de una máquina de traslado la pluralidad de troncos.
10. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que la manipulación incluye volver 35 a cargar en una máquina de traslado la pluralidad de troncos.
11. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que la manipulación incluye procesar los troncos en un aserradero.
12. El procedimiento según cualquiera de las reivindicaciones anteriores, en el que la al menos una primera o segunda imagen estéreo son tomadas por un par de cámaras.
13. El procedimiento según la reivindicación 12, en el que el par de cámaras están montadas en maquinaria que manipula los lotes de troncos.
14. Un sistema para realizar un seguimiento de un tronco de madera individual de una pluralidad de troncos de madera que están transportándose desde una ubicación geográfica, estando adaptado el sistema para llevar a cabo el procedimiento según una cualquiera de las reivindicaciones 1 a 13.
Patentes similares o relacionadas:
Bastón medidor de distancia, del 20 de Julio de 2020, de FERNANDEZ PAEZ, Margarita Ester: 1. Bastón medidor de distancia para su utilización preferente en el juego de la petanca que se caracteriza porque el bastón calza sobre el boliche a través de un […]
DISPOSITIVO ÓPTICO DE COMPROBACIÓN DE LA HINCA DE UN PILOTE, del 11 de Junio de 2020, de UNIVERSIDAD POLITECNICA DE MADRID: Dispositivo óptico de comprobación de la hinca de un pilote que comprende una estructura portante, una cámara , un brazo articulado, que a su vez comprende […]
Dispositivo de prueba o verificación y método de control de una superficie exterior de una pieza separada por rotura o fractura, del 25 de Marzo de 2020, de ALFING KESSLER SONDERMASCHINEN GMBH: Método para comprobar una superficie exterior de una pieza , en particular de un componente del motor , por ejemplo de una biela , de las zonas […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
DISPOSITIVO DE MEDICIÓN DE LONGITUD MORFOLOGICA BASADO EN LA TÉCNICA DE LASER ANGULAR (TLA) Y METODO ASOCIADO CON EL MISMO, del 23 de Enero de 2020, de UNIVERSIDAD CES: La presente invención se refiere a un dispositivo para llevar a cabo un proceso de medición de longitudes morfológicas mediante el uso de una […]
Sistema y método para transportar recipientes de muestras, del 25 de Diciembre de 2019, de BECKMAN COULTER, INC.: Sistema para transportar recipientes de muestras que comprende: una unidad de gestor que comprende una zona de distribución y uno o más […]
Máquina de medición y de clasificación de piezas de ensamblaje del tipo remaches con cabezas fresadas, del 13 de Noviembre de 2019, de Stelia Aerospace: Máquina de medición y de clasificación de piezas de ensamblaje, del tipo remaches con cabeza fresada, que comprenden cada una una cabeza […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]