Procedimiento y sistema de cálculo para la evaluación de las prestaciones en precisión de un sistema de navegación por satélite.
Procedimiento de cálculo de los sucesos de baja probabilidad para la evaluación de las prestaciones en precisiónde un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales deradiolocalización hacia un segmento receptor,
caracterizado porque comprende las siguientes etapas:
- Una etapa previa de medición del error es timado de localización de un receptor del sistema para una multitudde muestras y de cálculo del umbral de error máximo de localización, denominado radio de protección, quepuede garantizar el sistema para dichas muestras, el error estimado y el radio de protección definiéndose enuna dimensión de un marca de posición;
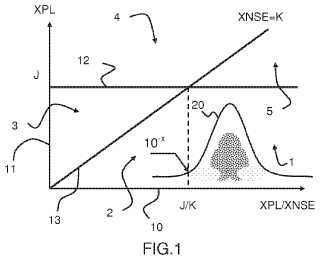
- Una etapa de cálculo de una primera proporción (1) de una distribución de muestras que verifica las siguientescondiciones:
i. El radio de protección (XPL) es inferior a un umbral de alerta (J);
ii. El cociente del radio de protección (XPL/XNSE) es superior a un cociente de seguridad (J/K), siendo elcociente de seguridad la relación entre el umbral de alerta (J) y un nivel de exigencia de error estimado (K).
- Una etapa de cálculo de una segunda proporción (2) de la distribución de muestras que verifica las siguientescondiciones:
i. El radio de protección (XPL) es inferior al umbral de alerta (J);
ii. El cociente del radio de protección y del error estimado de localización (J/K) es inferior al cociente deseguridad;
iii. El error estimado de localización (XNSE) es inferior al nivel de exigencia de error estimado (K).
- Una etapa de cálculo de la probabilidad de la distribución de las muestras para las cuales el cociente del radiode protección el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es igual alcociente de seguridad (J/K);
- Una etapa de modelización de al menos una componente de la distribución de las muestras, representando lacomponente unas muestras con baja probabilidad de aparición de la distribución y calculándose la modelizaciónmediante la aplicación de la teoría de valores extremos a partir de dichas muestras observadas de ladistribución.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11156529.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: LEVY,JEAN-CHRISTOPHE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Monitorización de la integridad, detección o aislamiento de fallos del segmento espacial.
PDF original: ES-2397090_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de cálculo para la evaluación de las prestaciones en precisión de un sistema de navegación por satélite La presente invención se refiere al campo de los sistemas de navegación por satélite y de manera más particular a un procedimiento de cálculo de los sucesos de baja probabilidad para la evaluación de de las prestaciones en precisión de dicho sistema.
Actualmente, los servicios comerciales que utilizan los sistemas de navegación por satélite se desarrollan de manera considerable. Los productos que funcionan a partir de señales de radiolocalización se han democratizado ampliamente en el día a día de los hogares instalados a bordo de los vehículos automóviles para la asistencia a la navegación por carretera al principio y últimamente en los dispositivos de telefonía móvil para una multitud de servicios de asistencia a personas. Las evoluciones de los futuros sistemas de posicionamiento por satélite, por ejemplo el sistema europeo GALILEO, prometen unas prestaciones muy superiores a los sistemas actuales. De este modo, nuevos servicios que no se podían considerar por la falta de fiabilidad y de precisión de posicionamiento suficiente pueden hoy en día ver la luz para las empresas, en particular las empresas del transporte por carretera y del transporte aéreo. Por ejemplo, para el transporte por carretera, se busca transformar los modelos económicos de los servicios de explotación de los tramos de carretera de pago ofreciendo unas ofertas personalizadas al cliente. Para las compañías de transporte aéreo, las prestaciones incrementadas en fiabilidad y precisión de posicionamiento permiten integrar a bordo de las aeronaves unos dispositivos de navegación en los cuales los pilotos podrán confiar por completo. Esos dispositivos permitirán mejorar de manera considerable la seguridad del transporte aéreo. Sin embargo, para los servicios de los que depende la seguridad de las personas, es obligatorio probar la fiabilidad de los datos que transmite el sistema de navegación. Es la razón por la que las autoridades someten a los operadores de los sistemas de navegación por satélite a unos requisitos de servicio garantizado para el cliente del terminal.
Los sistemas de navegación por satélite se caracterizan por los datos con prestaciones de integridad, de precisión y de cobertura. La integridad es una medida de confianza en la información que proporciona el sistema de navegación por satélite. Una herramienta muy conocida para determinar la integridad de un punto suministrado es el diagrama de Stanford. El diagrama de Stanford es una matriz en dos dimensiones cuyo parámetro de entrada en el eje horizontal es el error de posición observado en vertical u horizontal, y cuyo parámetro de entrada en el eje vertical es el nivel de protección en vertical u horizontal calculado a partir de modelos estadísticos. Ese diagrama permite verificar la proporción de muestras medidas cuyo error de posición observado es más bajo que el nivel de protección.
La precisión de una posición viene definida por el error de posición estimado con respecto a la posición real. La precisión de la localización depende en particular del error de la distancia estimada entre el usuario y los satélites recibidos, así como de la configuración de la geometría de las medidas. Existe un valor indicativo de las condiciones de geometría de las medidas comúnmente denominado DOP por « Dilution of Precision » en lengua anglosajona. Cuando el valor de la DOP es alto, esto indica que los satélites utilizados para obtener la posición están próximos y, por lo tanto, que la geometría es mala y cuando el valor de la DOP es bajo esto indica que los satélites utilizados para obtener la posición están alejados y, por lo tanto, que la geometría es buena.
Los organismos encargados de las normas y de los controles relativos a la aviación civil exigen unos niveles de prestaciones rigurosos en particular en prestaciones de precisión para los servicios críticos. Entre esos servicios críticos que utilizan los datos de geo-localización de los sistemas de navegación por satélite, el servicio LPV200 (« Localizer Performance with Vertical Guidance ») ya exigía antes que el sistema de navegación por satélite muestre durante al menos el 95 % del tiempo un error de localización en vertical inferior a 4 metros y en horizontal inferior a 16 metros. En el futuro, se exige a los operadores que prueben que el sistema de navegación por satélite muestra al usuario una probabilidad de aparición de un error de localización en vertical superior a 10 metros inferior a 10-7 en condiciones de funcionamiento normal y una probabilidad de aparición de un error de localización superior a 15 metros inferior a 10-5 en condiciones de funcionamiento degradado. Ese servicio determina el nivel de alerta en vertical en 35 metros y en horizontal en 40 metros.
Se sabe que los sistemas de aumentación por satélite son capaces de cumplir con las especificadores exigidas para sucesos de muy baja probabilidad. Esas verificaciones se han realizado a través de procedimientos arduos y engorrosos durante las fases de desarrollo. De acuerdo con las técnicas actuales, estas demandarían realizar unas mediciones cuya duración de prueba alcanzaría un tiempo excesivamente largo (p. ej. varias decenas de años) . En efecto, para realizar unas mediciones de márgenes de integridad, la estadística interferencial clásica busca establecer un modelo del comportamiento de una variable aleatoria en el campo observable de las realizaciones. Para obtener unas estadísticas pertinentes, es necesario recuperar unos datos lo suficientemente des-correlativos como para no medir informaciones redundantes. Se estima que es necesario realizar unos muestreos con un intervalo de alrededor de 5 minutos entre cada medición. Ahora bien, dada la baja probabilidad de los sucesos que se pretende detectar, esto implicaría recoger miles de muestras a lo largo de miles de años de mediciones.
La solicitante ha divulgado en la solicitud de patente anterior WO/2009/112483 un dispositivo que proporciona los medios para estimar una indicación de integridad de un sistema de navegación por satélite que permite establecer un modelo de la distribución de los errores de localización de muy baja probabilidad a partir de la teoría de los valores extremos. Sin embargo, actualmente no existe ninguna herramienta de medición de la precisión que permita certificar al usuario unos niveles de exigencia con bajas probabilidades de aparición ya que las prestaciones en precisión dependen también de la geometría de los satélites y los datos recogidos no tienen en cuenta todos los casos de geometría de los satélites para cada usuario.
En el artículo de B. Vassileva y otros « SBAS Vertical Protection Level Assessment in the case of Error Reduction », Modem Computing, 2006. JVA ’06. IEEE John Vincent Atanasoff, 2006, International Symposium On, IEEE, PI, 1 de octubre de 2006, páginas. 137-142, XP031035961, ISBN: 978-0-7695-2643-0, se describe un procedimiento de verificación de las prestaciones de precisión en localización de un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales de radiolocalización hacia un segmento receptor. El procedimiento comprende una etapa de medición del error estimado de localización de un receptor (PE) del sistema para una multitud de muestras y de cálculo del umbral de error máximo de localización, denominado radio de protección (PL) : el procedimiento de Vassileva compara la probabilidad de aparición de algunas de las condiciones anteriores con un umbral de tolerancia para verificar las prestaciones en precisión del sistema de navegación por satélite. Sigue existiendo, no obstante, una posibilidad de mejora de la evaluación del margen de integridad para las aplicaciones aeronáuticas. La presente invención responde a esa necesidad.
Un objetivo de la invención es garantizar las prestaciones en precisión de un sistema de navegación por satélite que toma en consideración todas las situaciones de geometría por satélite para un usuario y garantizar a un usuario una muy baja probabilidad de aparición de un error de localización superior a los requisitos impuestos a los operadores.
De manera más precisa, la invención se refiere a un procedimiento de cálculo de los sucesos de baja probabilidad para la evaluación de las prestaciones en precisión de un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales de radiolocalización hacia un segmento receptor, caracterizado porque comprende las etapas siguientes. De manera ventajosa, este comprende las siguientes etapas:
-Una etapa previa de medición del error estimado de localización... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de cálculo de los sucesos de baja probabilidad para la evaluación de las prestaciones en precisión de un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales de radiolocalización hacia un segmento receptor, caracterizado porque comprende las siguientes etapas:
- Una etapa previa de medición del error estimado de localización de un receptor del sistema para una multitud de muestras y de cálculo del umbral de error máximo de localización, denominado radio de protección, que puede garantizar el sistema para dichas muestras, el error estimado y el radio de protección definiéndose en una dimensión de un marca de posición;
- Una etapa de cálculo de una primera proporción (1) de una distribución de muestras que verifica las siguientes condiciones:
i. El radio de protección (XPL) es inferior a un umbral de alerta (J) ;
ii. El cociente del radio de protección (XPL/XNSE) es superior a un cociente de seguridad (J/K) , siendo el cociente de seguridad la relación entre el umbral de alerta (J) y un nivel de exigencia de error estimado (K) .
- Una etapa de cálculo de una segunda proporción (2) de la distribución de muestras que verifica las siguientes condiciones:
i. El radio de protección (XPL) es inferior al umbral de alerta (J) ;
ii. El cociente del radio de protección y del error estimado de localización (J/K) es inferior al cociente de seguridad;
iii. El error estimado de localización (XNSE) es inferior al nivel de exigencia de error estimado (K) .
-Una etapa de cálculo de la probabilidad de la distribución de las muestras para las cuales el cociente del radio de protección el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es igual al cociente de seguridad (J/K) ;
- Una etapa de modelización de al menos una componente de la distribución de las muestras, representando la componente unas muestras con baja probabilidad de aparición de la distribución y calculándose la modelización mediante la aplicación de la teoría de valores extremos a partir de dichas muestras observadas de la distribución.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque, para verificar las prestaciones en precisión, comprende una etapa de cálculo, por una parte, de la probabilidad de obtener una muestra para la cual el cociente del radio de protección y del error estimado de localización (XPL/XNSE) sea inferior al cociente de seguridad (J/K) y, por otra parte, para esa muestra, de la probabilidad de que el radio de protección (XPL) sea inferior al umbral de alerta (J) y de que el error estimado de localización (XNSE) sea superior al nivel de exigencia de error estimado (K) .
3. Sistema de cálculo de los sucesos de baja probabilidad para la evaluación de las prestaciones en precisión de un sistema de navegación por satélite, caracterizado porque está adaptado para aplicar el procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores.
Patentes similares o relacionadas:
Procedimiento mejorado para determinar la posición y/o la velocidad de un vehículo guiado; sistema asociado, del 27 de Marzo de 2019, de ALSTOM Transport Technologies: Un procedimiento para seleccionar un conjunto de satélites visibles utilizables (LSVU) de un conjunto de satélites visibles (LSV) de una constelación de […]
Dispositivo y procedimiento para la determinación de la posición y/o velocidad de un aparato en un sistema para la navegación por satélite, del 30 de Agosto de 2017, de MBDA Deutschland GmbH: Dispositivo para la determinación de la posición y/o velocidad de un aparato en un sistema para la navegación por satélite, que presenta una pluralidad […]
Procedimiento para mejorar de la continuidad en un sistema de navegación por satélite de doble frecuencia, del 24 de Agosto de 2016, de Airbus DS GmbH: Procedimiento para procesar un mensaje de alarma que se ha generado y transmitido por medio de un procedimiento para mejorar la continuidad en un […]
Sistema y procedimiento de determinación del error de posición de un receptor de localización satelital, del 3 de Agosto de 2016, de THALES: Sistema de determinación de una distribución de un error de posición de un receptor de señales de localización, siendo enviadas dichas señales por al menos un satélite, […]
Un algoritmo RAIM perfeccionado, del 15 de Octubre de 2014, de Airbus DS GmbH: Un método RAIM para determinar un riesgo de integridad en un GNSS procesando varias señales de medición de distancias recibidas de satélites del GNSS en que […]
Método y aparato para determinar un parámetro de indicación de integridad que indica la integridad de la información de posicionamiento determinada en un sistema de posicionamiento global, del 4 de Junio de 2014, de EUROPEAN SPACE AGENCY: Un método para determinar un parámetro de indicación de integridad (IR; PL) que indica la integridad de la información de posicionamiento determinada […]
Un método para detectar los cambios de frecuencia de reloj en un reloj a bordo de un satélite de un sistema de navegación global, del 4 de Junio de 2014, de Airbus DS GmbH: Un método para detectar saltos de frecuencia de reloj que se producen a bordo de un satélite de navegación de un sistema de navegación global, que comprende […]
Un método de reducción del impacto de los saltos de frecuencia de vehículos espaciales sobre un dispositivo de navegación global, del 26 de Febrero de 2014, de ASTRIUM GMBH: Un método de reducción del impacto de saltos de frecuencia de reloj de vehículos espaciales sobre un dispositivo para detección de posición en un sistema de navegación […]