Método y sistema de visión artificial para el control de calidad de servicios públicos municipales.
Método y Sistema de Visión artificial a bordo de un vehículo para la detección automática de residuos de las vías públicas y envío inalámbrico de los datos captados a una unidad central en gabinete para su almacenamiento en un sistema de información y obtención de registros gráficos en tiempo real.
El objeto de invención se refiere a un método y a un sistema de visión artificial que tienen la finalidad de discriminar en continuo y en tiempo real la presencia y categoría de residuos en las vías públicas, determinando unos niveles de ensuciamiento (denominados en el sector como "puntos negros"), así como la localización, dimensión y características de dichos puntos. Para ello el sistema utiliza un sensor de imagen conectado a una unidad de proceso y a un sensor de posición. La imagen de la zona de estudio obtenida se analiza en una unidad de proceso embarcada en el vehículo. Como resultado del procesamiento realizado se expresan los resultados como niveles de ensuciamiento o niveles de residuos existentes. El sistema transmite las muestras visuales, su valor numérico de ensuciamiento y posición geográfica a un sistema de información en gabinete para asistencia a la toma de decisión sobre los servicios de limpieza en la zona afectada.
El sistema, gracias a su elevado grado de automatización permite la captación, procesamiento y envío de datos, coordenadas de posicionamiento e imágenes de los diferentes residuos que aparezcan en las vías públicas, de modo que se mejore la gestión de su conservación, limpieza y mantenimiento de las mismas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031558.
Solicitante: INYPSA, INFORMES Y PROYECTOS, S. A.
Nacionalidad solicitante: España.
Inventor/es: CUETOS REVUELTA,MARIA JOSE, GETINO GONZÁLEZ,José María, SANZ GÓMEZ,Mario, HERNÁNDEZ CACHO,José Antonio, PUJOL VILA,Oriol, ESCALERA GUERREO,Sergio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65F3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65F RECOGIDA O RETIRADA DE BASURAS DOMESTICAS O DESPERDICIOS SIMILARES (desinfección de basuras A61L; desintegrado de basuras B02C; clasificación de basuras B03B, B07B; vehículos a mano para el transporte de recipientes de basuras B62B; soportes de sacos B65B 67/00; transformación de basuras en fertilizantes C05F; transformación de basuras en combustibles sólidos C10L; colectores, pozos E03F; disposiciones en los edificios para evacuar las basuras E04F 17/10; hornos de incineración de basuras F23G). › Vehículos especialmente adaptados para la recogida de basuras (vehículos en general B60; equipo o accionamiento auxiliar de vehículos B60K; descarga del contenido por basculado del vehículo completo B65G; aparatos sobre ruedas para vaciar los colectores o los pozos E03F 7/10).
- G01N21/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Investigación de la presencia de grietas, de defectos o de manchas.
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Descripción:
Método y Sistema de Visión Artificial para el control de calidad de servicios · públicos municipales. 5 Objeto de la invención El objeto de la presente invención, según se expresa en el enunciado de esta memoria descriptiva, se refiere a un método y un sistema de visión artificial aplicados al 1O control de calidad y a la gestión de incidencias de limpieza en las vías públicas.
Antecedentes de la invención En los servicios de control de calidad y gestión de incidencias de limpieza en las vías públicas que implementan en la actualidad numerosos Ayuntamientos españoles se utilizan distintos estándares que miden el nivel de ensuciamiento o nivel de residuos existente en un tramo, seleccionando de forma aleatoria la muestra representativa dentro de cada bloque de inspección (barrio, distrito, calle, etc) . Los agentes de inspección realizan el cálculo de un índice de ensuciamiento en función del número de residuos de cada categoría y su dimensión, ponderando el grado de importancia de cada tipo de residuo en una escala de valoración sobre la sensación o percepción de suciedad. Por tanto, los servicios de control de calidad no ofrecen datos totalmente objetivos de las inspecciones, ya que en ellos influye el criterio personal de un inspector y la medición aproximada de los elementos. Aunque dicho inspector se guía por unos parámetros definidos (tablas y reglas de agrupamiento de residuos) , hay un ámbito de evaluación que queda al criterio de "una percepción visual subjetiva" y a su interpretación.
Por otra parte, las herramientas existentes de visión artificial, así como la tecnología de reconocimiento de imágenes, tanto en España como en el extranjero se dedican de modo general a trabajos en entornos industriales cerrados, detectando la aparición de errores en los productos fabricados en líneas continuas (US20070111648-A1, ES2311437-A1 y ES2325199-A1) . Estos errores obedecen a características
5 irregulares o incidencias en colores, formas o dimensiones. Estas tecnologías se han ido incorporando a otros usos, como, por ejemplo, en el sistema de lectura automática de matrículas de vehículos o detección de señales de tráfico (ES2304080Al y C06110141-Al) . Hasta la fecha no se conoce la existencia de ninguna patente cuyas características sean el objeto de la presente invención.
1O 15 Por todo ello, se ha detectado una necesidad de proporcionar un método y un sistema automatizado e informatizado para la captura de datos, rápido almacenamiento e interpretación de las lecturas. La obtención de datos objetivos para los indicadores de calidad y gestión de las incidencias de limpieza, y su localización en las vías públicas, no sólo mejorará el rendimiento de los equipos de inspección, sino la actuación de la empresa que realiza el control, las empresas concesionarias o de servicios así como a los técnicos municipales en la toma de decisiones y los tiempos de respuesta en la resolución de las incidencias detectadas.
Descripción de la invención
20 25 El método desarrollado para el reconocimiento de residuos empleado en esta invención se divide en tres etapas diferenciadas, tal y como puede observarse en la figura 1: (a) detección de todos los residuos existentes en el tramo inspeccionado, (b) discriminación de residuos orgánicos e inorgánicos y (e) detección de residuos concretos (papeles, colillas y excrementos) . El método empleado se basa en entrenamientos previos y aprendizaje del sistema a partir del análisis de imágenes y la aplicación de los algoritmos diseñados para la consecución de los objetivos.
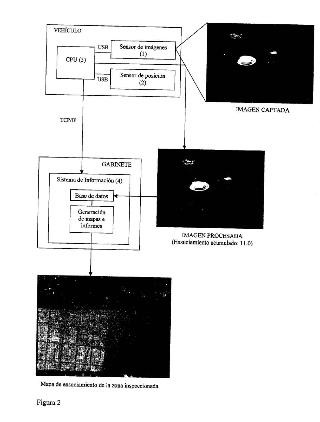
30 El sistema para la detección de los residuos mediante visión artificial se compone de varios elementos hardware y software, tal y como se aprecia en la figura 2. En dicha figura se puede observar:
(1) Sensor de imagen y óptica: se trata de un dispositivo con sensor CMOS y con su óptica asociada e interfaz de conexión de datos conforme al estándar
USB 2.0. A través de un sistema de anclaje se permite la instalación del dispositivo de toma de imágenes en el techo del vehículo o en la ventanilla. Este dispositivo proporciona fotografias en color con una resolución de 2560x1920 píxeles. Las ópticas son de 8 y 12 mm, próximas al gran angular para conseguir la mayor superficie posible de captura.
(2) Sensor de posición: dispositivo GPS Logger de pequeñas dimensiones situado en el interior del vehículo que permite conocer su posición en tiempo real (en 1O coordenadas UTM) , con interfaz de conexión de datos conforme al estándar USB 2.0
(3) Unidad de Proceso (CPU) : dispositivo de arquitectura Tablet PC de fácil manejo para el operador mediante pantalla táctil y que es fácilmente adaptable a una 15 bandeja portátil para su colocación. En este dispositivo se realizan una serie de funciones a través del software implementado para ello. Estas funciones se concretan en:
envío de órdenes para el proceso de captura de imágenes y de obtención 20 de las coordenadas UTM.
procesamiento y análisis de imágenes obtenidas siguiendo el método explicado previamente.
envío de datos capturados y procesados a un servidor de bases de datos remoto mediante protocolo TCPIIP.
Las conexiones entre los tres dispositivos mencionados se realiza utilizando interfaces USB.
(4) El Sistema de Información está situado en una unidad en gabinete. Consta de un módulo para el almacenamiento en una base de datos SQL de los datos recibidos desde la vía pública en tiempo real, tanto de las imágenes como de las coordenadas UTM, y otro módulo para la obtención de registros gráficos incluyendo mapas de índices de ensuciamiento de las zonas inspeccionadas.
Breve descripción de los dibujos
5 A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con unas realizaciones de dicha invención, que se presentan como ejemplos ilustrativos y no limitativos de ésta.
1 O
La figura 1 muestra el método de detección y reconocimiento de los residuos en las vías públicas mediante visión artificial, así como la consecución de algoritmos y procedimientos diseñados para ello.
15
La figura 2 muestra un esquema general de la invención en la que se pueden observar sus elementos constituyentes, así como unos ejemplos de las imágenes: la imagen tal como es captada, la imagen procesada con los residuos que ha reconocido y su nivel de ensuciamiento y un informe gráfico obtenido: mapa de ensuciamiento de la zona estudiada.
Descripción de una realización preferente
20 25 30 El sistema para el control de calidad de servicios públicos municipales consta de un sensor de imagen con su óptica asociada (1) que se sitúa con un soporte o bien en el techo del vehículo o bien en a la altura de la ventanilla de manera que su uso sea lo más cómodo posible para el operador. Este dispositivo proporciona fotografias en color con una resolución de 2560x1920 píxeles de modo que detecta con claridad los residuos e incidencias en las vías urbanas ya que lee directamente la información de cada píxel para evitar la gran intensidad lumínica de los entornos abiertos y el efecto blooming. En el vehículo a la altura del salpicadero se encuentra también un sensor de posición (2) que da en tiempo real las coordenadas UTM de posición del vehículo. Las imágenes son capturadas por una Unidad de Proceso (3) situada sobre una bandeja portátil a la altura del salpicadero en asiento delantero. Las imágenes son seguidamente procesadas por este mismo dispositivo. Se lleva a cabo el método de detección y reconocimiento de residuos a través de los algoritmos diseñados, discriminando dos grupos principales de residuos: orgánicos e inorgánicos; y a su
vez 3 categorías concretas de residuos: "papel", "colilla" y "excremento", obteniendo
como resultado un índice o nivel de ensuciamiento de cada imagen. Las imágenes
captadas y procesadas, el valor numérico de ensuciamiento y las coordenadas UTM
son enviados a un servidor de bases de datos mediante protocolo TCPIIP. Esta base
5 de datos forma parte de uno de los módulos del Sistema de Información (4) , donde se
lleva a cabo el almacenamiento de dicha información. Este sistema se encuentra en
una unidad de gabinete incorporando un módulo para la obtención de registros
gráficos tales como mapas de localización de la imagen capturada y de índices de
ensuciamiento de zonas inspeccionadas. Esta información permite la rápida
1 O asistencia de los servicios de limpieza a la zona afectada, mejorando el control de
calidad de las vías públicas.
Reivindicaciones:
REIVINDICACIONES:
l. Sistema de Visión Artificial a bordo de automóvil para el control de calidad de servicios públicos municipales, caracterizado porque está constituido por la 5 asociación funcional de ( 1) sensor de imagen con su óptica asociada, que captura las imágenes; (2) un sensor de posicionamiento global, que proporciona coordenadas UTM; (3) una Unidad de Proceso (CPU) , los tres a bordo de un vehículo, que analiza las imágenes obtenidas y envía los datos capturados y procesados a gabinete mediante protocolo TCPIIP y (4) un Sistema de Información, situado en una unidad
O en gabinete, que almacena la información recibida y permite la obtención de registros gráficos.
2. Método de Visión Artificial para el control de calidad de servicios públicos municipales, que comprende las siguientes etapas: 15 (a) detección de todos los residuos existentes en el tramo inspeccionado,
(b) discriminación de residuos orgánicos e inorgánicos y
(e) detección de residuos concretos
3. Método de Visión Artificial para el control de calidad de servicios públicos municipales, caracterizado porque la etapa para la detección de todos los residuos existentes en el tramo inspeccionado se realiza mediante la unión de la imagen de blancos junto con la imagen previa eliminación del fondo.
4. Método de Visión Artificial para el control de calidad de servicios públicos municipales, caracterizado porque la etapa para la discriminación de residuos orgánicos e inorgánicos se realiza mediante la utilización del clasificador Support Vector Machine (SVM) con Radial Basis Function kernel a partir del estudio del tono de color, textura, bordes y esquina de cada residuo.
5. Método de Visión Artificial para el control de calidad de servicios públicos municipales, caracterizado porque en etapa para la detección de residuos concretos se discriminan: papeles, colillas y excrementos.
6. Método de Visión Artificial para el control de calidad de servicios públicos municipales, caracterizado porque la etapa para la detección del residuo "papel" se realiza mediante el estudio de porcentaje de blancos en la imagen, para cada uno de los residuos inorgánicos definidos.
7. Método de Visión Artificial para el control de calidad de servicios públicos municipales, caracterizado porque la etapa para la detección del residuo "colilla" se realiza mediante el algoritmo KMeans, para cada uno de los residuos inorgánicos definidos.
8. Método de Visión Artificial para el control de calidad de servicios públicos municipales, caracterizado porque la etapa para la detección del residuo "excremento" se realiza mediante el algoritmo KMeans, para cada uno de los residuos orgánicos definidos.
9. Sistema de Visión Artificial según reivindicación 1, caracterizado por estar basado en una unidad de proceso que analiza y procesa en tiempo real las imágenes captadas según las etapas del método expresado según las reivindicaciones 2-8.
Patentes similares o relacionadas:
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]