Método para reducir oscilaciones en aerogeneradores marinos.
Método para operar un aerogenerador marino (10; 11) y reducir oscilaciones,
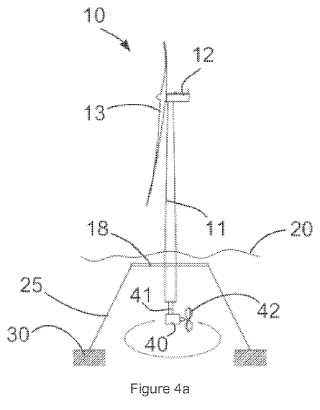
elaerogenerador (10; 11) comprendiendo una pluralidad de palas (13), y un sistema de paso paragirar las palas y uno o más propulsores submarinos (40), el método comprendiendo por encimade una velocidad nominal, girar las palas para mantener el par aerodinámico del rotor constante,y medir una oscilación del aerogenerador marino y operar los uno o más propulsores de maneratal que la oscilación sea reducida, en el cual el método de control de paso de las palas delaerogenerador en el aerogenerador no es afectado para amortiguar las oscilaciones.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10382317.
Solicitante: Alstom Renovables España, S.L.
Nacionalidad solicitante: España.
Inventor/es: ROSSETTI,MICHELE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B35/44 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 35/00 Buques o estructuras flotantes similares especialmente adaptadas a fines específicos y no previstas de otra manera. › Construcciones flotantes, almacenes, plataformas de perforación, o talleres flotantes, p. ej. que llevan dispositivos separadores agua-aceite.
- B63B39/00 B63B […] › Equipo para reducir cabeceo, balanceo, o movimientos similares indeseados de embarcaciones; Aparatos para indicar la actitud de una embarcación.
- B63H25/42 B63 […] › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
- F03D11/00
- F03D11/04
- F03D7/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F03 MAQUINAS O MOTORES DE LIQUIDOS; MOTORES DE VIENTO, DE RESORTES, O DE PESOS; PRODUCCION DE ENERGIA MECANICA O DE EMPUJE PROPULSIVO O POR REACCION, NO PREVISTA EN OTRO LUGAR. › F03D MOTORES DE VIENTO. › F03D 7/00 Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00). › teniendo los motores de viento el eje de rotación dispuesto sustancialmente paralelo al flujo de aire que entra al rotor.
PDF original: ES-2438116_T3.pdf
Fragmento de la descripción:
Método para reducir oscilaciones en aerogeneradores marinos La presente invención se refiere a aerogeneradores marinos, y más particularmente se refiere a5 un método para operar un aerogenerador marino y reducir oscilaciones en aerogeneradores marinos y aerogeneradores marinos adaptados para este propósito.
ESTADO DE LA TÉCNICA
Los aerogeneradores modernos son comúnmente utilizados para suministrar electricidad a la red eléctrica. Generalmente, los aerogeneradores de este tipo comprenden un rotor con un buje y una pluralidad de palas. El rotor se pone en estado de rotación bajo la influencia del viento en las palas. La rotación del eje del rotor acciona el rotor del generador, ya sea directamente (accionamiento directo) , o mediante el uso de una caja multiplicadora.
Con frecuencia, los aerogeneradores son agrupados en los conocidos parques eólicos. En tierra, es cada vez más difícil encontrar lugares adecuados para parques eólicos. En muchas ocasiones, ha habido mucha oposición en contra del emplazamiento de aerogeneradoresprincipalmente debido al ruido producido por los aerogeneradores y a efectos estéticos del
emplazamiento de los aerogeneradores. Adicionalmente, para que los aerogeneradores puedan trabajar eficientemente, es necesaria una zona ventosa y abierta, libre de árboles y edificios, etc., la cual no siempre está disponible.
Por muchas razones, se ha hecho más popular emplazar los aerogeneradores o parques eólicos en el mar, ya sea cerca de la costa (near-shore) o marinos (a veces referidos como “faroffshore”) : lejos de la costa hay zonas más grandes disponibles, el viento puede ser más constante y de velocidad más alta en el mar que en tierra, y la cizalladura del viento es generalmente reducida. Adicionalmente, con restricciones de ruido reducidas, los aerogeneradores pueden rotar a velocidades más altas.
En aplicaciones cerca de la costa, los aerogeneradores pueden emplazarse fijamente, generalmente en aguas poco profundas (profundidades de aproximadamente 25 metros o menos) sobre bases en el fondo del mar. En aplicaciones lejos de la costa, los aerogeneradores pueden diseñarse para ser plataformas flotantes. Son conocidas muchas configuraciones para aerogeneradores flotantes. Éstas pueden dividirse, por ejemplo, según la forma en la cual tratan de alcanzar estabilidad estática: utilizando peso de lastre, líneas de amarre o flotabilidad. Del WO 2010/048360 se conoce un aerogenerador según el estado de la técnica.
Generalmente, las plataformas que tratan de alcanzar la estabilidad estática utilizando un lastre comprenden una estructura de torre alargada que comprende un peso de lastre debajo de la línea de agua y un tanque de flotabilidad más o menos en la línea de agua. Se muestra unejemplo en la figura 1. Por ejemplo, en WO2009/087200 y EP1348867, se muestran ejemplos deplataformas que tratan de alcanzar estabilidad estática utilizando la tensión de líneas de amarre.
Las plataformas que buscan alcanzar la estabilidad a través del uso de boyas distribuidas comprenden una pluralidad de tanques de flotabilidad distribuidos alrededor de la torre en la línea del agua. DE10219062 muestra un ejemplo de una plataforma de este tipo. Todas las plataformas flotantes están provistas de algún tipo de amarre y medios de anclaje. También pueden utilizarse formas híbridas de las configuraciones de aerogeneradores descritas.
Las plataformas flotantes pueden realizar movimientos y rotaciones a lo largo de tres ejes. Con referencia a la figura 2, pueden definirse los ejes x, y, y z de un sistema de coordenadas local.
Generalmente, el eje x está determinado por la dirección del viento. El eje z está determinado por 55 el eje longitudinal del aerogenerador. El eje y es perpendicular a ambos ejes x y z.
Generalmente, un movimiento lineal a lo largo del eje x es llamado “oscilación longitudinal” (surge) , un movimiento lineal a lo largo del eje y es, generalmente, llamado “oscilación transversal” (sway) , y generalmente un movimiento lineal a lo largo del eje z es llamado 60 “oscilación vertical” (heave) . Generalmente movimiento rotacional alrededor del eje x es llamado un “giro” (roll) , un movimiento rotacional alrededor del eje y es generalmente llamado como “balanceo” (pitch) (no debe confundirse con el paso (pitching) de una pala que es una rotación de una pala de un aerogenerador alrededor de su eje longitudinal) , y un movimiento rotacional alrededor del eje z es generalmente llamado como “orientación” (yaw) .
Las plataformas flotantes pueden realizar patrones complicados de movimiento bajo la influencia, por ejemplo de, ráfagas de viento, viento turbulento, cizalladura del viento, asimetría debido a heladas en las palas, olas y corrientes de marea. Una fuente adicional de cargas que pueden inducir movimientos u oscilaciones en una plataforma de un aerogenerador flotante es el control del paso (pitch) de las palas del aerogenerador. Una estrategia común de un sistema depaso (pitch system) en un aerogenerador de velocidad variable es mantener la pala en una “posición de paso por debajo de nominal” predefinida para velocidades de viento iguales o por debajo de una velocidad de viento nominal. Dicha posición de paso predefinida puede, generalmente, estar cerca de un ángulo de paso de 0º. Por encima de la velocidad nominal, las palas se rotan para mantener sustancialmente constante el momento aerodinámico entregado por el rotor. La velocidad del viento de corte exacta, la velocidad del viento nominal y la velocidad del viento de parada pueden depender de la ubicación del aerogenerador, de su diseño, etc.
La figura 3 ilustra la estrategia de velocidad variable. Hasta la velocidad nominal, el ángulo depaso no varía y es igual o cercano a cero. Por encima de la velocidad nominal, el ángulo de pasovaría para mantener constante el momento aerodinámico. Al mismo tiempo, debido al cambio en el ángulo de paso (y ángulo de ataque) de las palas, el empuje del aerogenerador (en la direcciónx, como se ha definido en la figura 2) es reducido por encima de la velocidad nominal del viento. Cuando la velocidad del viento varía por encima de la velocidad nominal del viento, el ángulo de paso necesita ser ajustado constantemente. Este ajuste conduce a un empuje del viento constantemente cambiante. Un empuje puede causar oscilaciones del aerogenerador de proa a popa. Estas oscilaciones pueden bien ser oscilaciones longitudinales (desplazamiento en la dirección x) o movimiento de balanceo (rotación alrededor del eje y) . Efectos similares tienen lugar también en aerogeneradores en tierra o en aerogeneradores cercanos a la costa fijados encimientos en el mar. La variación del ángulo de paso y la variación del empuje que conlleva puede dar lugar también a oscilaciones de proa a popa en aerogeneradores cerca de la costa.
Bajo ciertas circunstancias, la resonancia del aerogenerador en dicha oscilación de proa a popa puede ser un problema. El tipo de oscilaciones de proa a popa que pueden ocurrir y el tipo deproblemas que pueden causar dependen, por ejemplo, de la configuración de la plataforma de laturbina, la tensión de las líneas de amarre, la configuración de los tanques de flotabilidad, etc.
Una medida conocida para reducir la oscilación de proa a popa en aerogeneradores es variar elcontrol del paso de manera tal que la resonancia pueda ser evitada. Una desventaja de este método es que no se alcanza la potencia de salida máxima posible del aerogenerador porque no se emplean los ángulos de paso ideales. En segundo lugar, a pesar de que tal control del paso alternativo ha sido aplicado con éxito en algunos casos en aerogeneradores ubicados en tierra, no puede aplicarse siempre con éxito en aerogeneradores marinos. Esto es debido al hecho quelas oscilaciones generalmente pueden ser de baja frecuencia para lo cual existe un riesgo particular de resonancia.
Por lo tanto, sigue existiendo la necesidad de proporcionar un método efectivo para reducir las oscilaciones de proa a popa en aerogeneradores marinos y un aerogenerador adaptado para este propósito.
Además de las oscilaciones de proa a popa mencionadas anteriormente, bajo la influencia decondiciones atmosféricas y olas, en aerogeneradores marinos pueden ocurrir también oscilaciones laterales (por ejemplo, una oscilación transversal o una oscilación giratoria) u oscilaciones de orientación. También existe la necesidad de un método para reducir estos tipos de oscilaciones en aerogeneradores marinos y de un aerogenerador adaptado para dicho propósito.
Es un objeto de la presente invención cubrir, al menos parcialmente, las necesidades arriba... [Seguir leyendo]
Reivindicaciones:
1. Método para operar un aerogenerador marino (10; 11) y reducir oscilaciones, el aerogenerador (10; 11) comprendiendo una pluralidad de palas (13) , y un sistema de paso para girar las palas y uno o más propulsores submarinos (40) , el método comprendiendo por encima de una velocidad nominal, girar las palas para mantener el par aerodinámico del rotor constante, y medir una oscilación del aerogenerador marino y operar los uno o más propulsores de manera tal que la oscilación sea reducida, en el cual el método de control de paso de las palas del aerogenerador en el aerogenerador no es afectado para amortiguar las oscilaciones.
2. Método según la reivindicación 1, que comprende además determinación de la velocidad de una oscilación.
3. Método según la reivindicación 1 o 2, en el cual dicha oscilación es sustancialmente una oscilación de proa a popa.
4. Método según la reivindicación 3, en el cual dicha oscilación es sustancialmente una oscilación de balanceo.
5. Método según la reivindicación 3, en el cual dicha oscilación es sustancialmente una oscilación longitudinal.
6. Método según la reivindicación 1 o 2, en el cual dicha oscilación es una oscilación lateral.
7. Método según la reivindicación 1 o 2, en el cual dicha oscilación dicha oscilación es sustancialmente una oscilación de orientación.
8. Método según una cualquiera de las reivindicaciones anteriores, en donde dicho aerogenerador es un aerogenerador flotante (10) .
9. Aerogenerador marino (10; 11) que comprende una pluralidad de palas (13) y un sistema depaso para girar las palas y uno o más propulsores submarinos (40) , un sistema de medición deoscilaciones para medir una oscilación del aerogenerador y un sistema de control para operar los propulsores submarinos en respuesta a señales recibidas desde el sistema de medición deoscilaciones y un sistema de control de paso adaptado para girar las palas para mantener el paraerodinámico del rotor constante por encima de una velocidad de viento nominal, independientemente de la operación de los uno o más propulsores.
10. Aerogenerador marino según la reivindicación 9, en donde dicho aerogenerador es un aerogenerador marino flotante.
11. Aerogenerador marino según la reivindicación 9, en donde dicho aerogenerador es un aerogenerador marino fijo.
12. Aerogenerador marino según una cualquiera de las reivindicaciones 9 – 11, en donde elsistema de medición de oscilaciones comprende al menos un acelerómetro.
13. Aerogenerador marino según una cualquiera de las reivindicaciones 9 – 12, en donde elsistema de medición de oscilaciones comprende al menos un receptor GNSS.
14. Aerogenerador marino según una cualquiera de las reivindicaciones 9 – 13, en donde dicho sistema de control está adaptado para determinar la velocidad de una oscilación de las mediciones del sistema de medición de oscilaciones.
15. Aerogenerador marino según una cualquiera de las reivindicaciones 9 – 14, que comprende uno o más propulsores submarinos que están adaptados para adoptar orientaciones diferentes con respecto a la torre del aerogenerador.
16. Aerogenerador marino según una cualquiera de las reivindicaciones 9 – 15, que comprende una pluralidad de propulsores submarinos que tienen una orientación fija con respecto a la torre del aerogenerador.
Figura 1
Figura 2 Figura 3 Figura 4a Figura 4b Figura 4c
Patentes similares o relacionadas:
Turbina eólica con una luz de obstáculo de vuelo, del 23 de Octubre de 2019, de Senvion GmbH: Turbina eólica con una torre , que presenta al menos una luz de obstáculo de vuelo que irradia hacia fuera, que está conectada con una línea de suministro , […]
Sistema de regulación de potencia activa de un parque eólico, del 28 de Diciembre de 2018, de GAMESA INNOVATION & TECHNOLOGY, S.L: Sistema de regulación de potencia activa de un parque eólico, comprendiendo el parque eólico un grupo de aerogeneradores (Ai), una red de comunicaciones […]
Supervisión de la operación de una planta de generación eólica, del 16 de Octubre de 2018, de LM Wind Power International Technology II ApS: Un método de supervisión de la operación de una planta de generación eólica, en el que la supervisión comprende la recogida de datos de operación […]
Bomba de aceite de capacidad variable, del 30 de Mayo de 2018, de VESTAS WIND SYSTEMS A/S: Un método para el control de una presión del fluido en un sistema de suministro de fluido de una turbina eólica, incluyendo el sistema de suministro de […]
Aerogenerador, del 25 de Abril de 2018, de Wobben Properties GmbH: Aerogenerador con una torre , que se funda sobre un cimiento, y un módulo de potencia , presentando el módulo de potencia al menos un transformador y/o […]
Dispositivo que incluye un sistema adaptado para uso en compensación de temperatura de mediciones de tensión de estructuras reforzadas con fibra, del 7 de Marzo de 2018, de LM Wind Power International Technology II ApS: Un dispositivo que comprende una parte reforzada con fibra e incluye al menos un sistema adaptado para uso en la compensación de temperatura […]
Un método para fabricar una pala para una turbina eólica y una pala que comprende medios conductores segmentados, del 20 de Diciembre de 2017, de LM Wind Power International Technology II ApS: Un método para fabricar una pala reforzada con fibra para una planta de energía eólica, dicha pala se configura con por lo menos una cubierta de pala y medios para […]
Generador eólico, del 4 de Octubre de 2017, de GE Wind Energy (Norway) AS: Central eólica con una turbina eólica que comprende un eje de la turbina rotativo y un eje del generador , que puede ser una prolongación […]