Método para controlar a distancia un sistema de arma.
Procedimiento de control remoto de un sistema de arma de un vehículo de combate (1) con un ordenador delsistema de arma (10) que actúa sobre los dispositivos de orientación del sistema de arma,
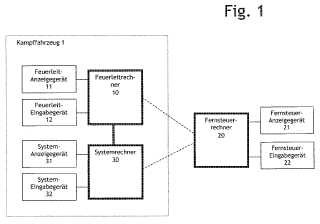
estando conectados alordenador del sistema de arma (10) un dispositivo de visualización del sistema de arma (11) para mostrar loscontenidos de la pantalla y un dispositivo de entrada del sistema de arma (12), que están dispuestos dentro delvehículo de combate para el control del sistema de arma en un modo de no control remoto, en el que es establecidauna conexión de datos entre un ordenador de control remoto (20) al que están conectados el dispositivo devisualización de control remoto (21) y un dispositivo de entrada de control remoto (22) y el ordenador del sistema dearma (10), caracterizado por que en un modo de control remoto para el control remoto del ordenador del sistema dearma (10) por el ordenador de control remoto (20) los contenidos de pantalla mostrados en el dispositivo devisualización del sistema de arma (11) en el modo de no control remoto son representados al menos parcialmenteen el dispositivo de visualización de control remoto (21) y las acciones de entrada que son realizadas por eldispositivo de entrada de control remoto (22) tienen el mismo efecto que las acciones de entrada del dispositivo deentrada del sistema de arma (12).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08000445.
Solicitante: KRAUSS-MAFFEI WEGMANN GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: KRAUSS-MAFFEI-STRASSE 11 80997 MUNCHEN ALEMANIA.
Inventor/es: BACHMANN, JORG, KOHLSTEDT, MICHAEL, SCHARF,MARKUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41A23/34 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41A CARACTERISTICAS DE FUNCIONAMIENTO O DETALLES COMUNES A LA VEZ A LAS ARMAS DE FUEGO INDIVIDUALES Y A LAS PIEZAS DE ARTILLERIA, p. ej. CAÑONES; MONTAJE DE LAS ARMAS DE FUEGO INDIVIDUALES O DE LAS PIEZAS DE ARTILLERIA. › F41A 23/00 Soportes para armas de fuego, p. ej. sobre vehículos; Disposición de las armas de fuego sobre vehículos (F41A 25/00, F41A 27/00 tienen prioridad). › montaje sobre vehículos de ruedas o de cadenas.
- F41G3/04 F41 […] › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › para la dispersión del tiro de una batería.
- F41G5/06 F41G […] › F41G 5/00 Sistemas para controlar la elevación o la dirección en los cañones (soportes para armas de fuego que permiten el movimiento en altura o en dirección p. ej. cureñas, F41A 27/00; computadores G06). › utilizando medios eléctricos para control remoto.
PDF original: ES-2444916_T3.pdf
Fragmento de la descripción:
Método para controlar a distancia un sistema de arma.
La invención se refiere a un procedimiento para el control remoto de un sistema de arma con las características del preámbulo de la reivindicación 1.
Los sistemas de arma modernos pueden ser controlados totalmente en la mayoría de los casos con uno o varios ordenadores con dispositivo de visualización incorporado. Todas las funciones necesarias para controlar el sistema de arma están generalmente agrupadas de forma centralizada en este ordenador del sistema de arma. Los ordenadores presentan por regla general componentes de hardware estándar, recurriéndose a sistemas operativos comunes, tales como MS Windows o Linux, de manera que estén disponibles también técnicas de conexión y comunicación estandarizadas. El ordenador del sistema de arma puede comprender, por ejemplo, las siguientes funciones:
-Ejecución de comandos de fuego (con cálculo balístico) .
-Comunicación con un puesto de mando superior.
-Representación cartográfica de informaciones basadas en coordenadas.
Los controles remotos de sistemas de arma son conocidos en sí. Son ventajosos ya que con ellos el personal operario puede manejar el sistema de arma desde un entorno seguro. El documento EP 1 111 324 A1 describe una unidad de combate militar que es empleada para el montaje modular de sistemas de defensa antiaérea y armamentos ligeros. Presenta un dispositivo de mando al que están conectados los componentes del sistema, incluyendo los componentes de la electrónica y de la instalación del arma. El dispositivo de mando está realizado portátil y unido a la unidad de combate mediante un cableado de hasta 50 m de longitud. Con ello se consigue un control remoto del sistema de arma. No obstante, en esta realización es desfavorable que no es posible una transmisión por radio. Además, los sistemas de arma modernos son controlados mediante ordenadores con dispositivos de visualización (por ejemplo, monitores y pantallas táctiles) , así como dispositivos de entrada (por ejemplo, teclados y ratones de ordenador) que sin embargo en conjunto son poco manejables para que el operario pueda transpórtalos una gran distancia lejos de la unidad de combate, existiendo además el peligro de daño durante el transporte.
El documento EP 1 679 483 A1 describe un procedimiento para la coordinación de varios vehículos de combate en una unidad de combate, recibiendo el sistema de arma de un vehículo de combate las coordenadas de un objetivo de otro vehículo de combate mediante una unidad de radio.
La invención tiene el objeto de conseguir un control remoto de un sistema de arma que sea manejado mediante un ordenador del sistema de arma con un dispositivo de visualización del sistema de arma incorporado.
La invención lleva a cabo este objeto con las propiedades de la parte característica de la reivindicación 1. Perfeccionamientos ventajosos están descritos en las reivindicaciones dependientes.
Una idea básica de la invención consiste en emplear para el control remoto un ordenador de control remoto con un dispositivo de visualización de control remoto incorporado. Para el modo de control remoto es establecida en primer lugar una conexión de datos entre el ordenador del sistema de arma y el ordenador de control remoto. Esta conexión puede estar configurada como conexión alámbrica o como conexión por radio, en particular como conexión WLAN. En el modo de control remoto los contenidos de la pantalla que son mostrados en el dispositivo de visualización del sistema de arma en el modo de no control remoto, son representados al menos parcialmente en el dispositivo de visualización de control remoto. Además las acciones de entrada, que son realizadas a través del dispositivo de entrada de control remoto, actúan para el ordenador del sistema de arma como si hubieran sido realizadas desde el dispositivo de entrada del sistema de arma. Por tanto, el ordenador del sistema de arma puede estar configurado como servidor de terminal y el ordenador de control remoto como cliente de terminal. Como protocolo puede ser empleado el protocolo de escritorio remoto (RDP) . Este proporciona la base técnica para la implementación de servicios de terminal entre dos sistemas de ordenador. El RDP regula la transmisión de los contenidos de pantalla y las acciones de entrada mediante la conexión de datos o la red entre un servidor de terminal y un cliente de terminal y tiene la ventaja de que es soportado por los sistemas operativos comunes.
La seguridad del sistema puede ser garantizada por medidas adicionales. Junto al protocolo RDP se emplea otro protocolo que sirve exclusivamente para la realización de una función de parada de emergencia. Para ello son transmitidas cíclicamente señales de vida desde el ordenador del control remoto al ordenador del sistema de arma. En caso de que el ordenador de dirección del fuego no reciba debidamente las señales de vida, el sistema de arma pasa a un estado seguro en el que en particular no pueden ser disparados tiros y/o se impide un movimiento del sistema de arma. Este puede ser el caso cuando la conexión es interrumpida, de manera que no llegan una o varias señales de vida. En el estado seguro el sistema de arma puede ser conectado también mediante el ordenador de control remoto. El estado seguro puede ser abandonado por las correspondientes acciones del operario. Esto es posible también mediante el control remoto cuando es restablecida la conexión.
Mediante la interfaz de usuario que se muestra en el ordenador de control remoto pueden ser controladas a distancia de forma ventajosa todas las funciones del ordenador del sistema de arma y preferentemente del sistema de arma completo. Por ejemplo, puede ser preparado y activado un comando de fuego en el ordenador de control remoto de la misma forma que si el operario se sentara en el ordenador del sistema de arma. Cuando las acciones de entrada tienen como consecuencia, por ejemplo, una variación del contenido de la pantalla, entonces los nuevos contenidos de la pantalla son transmitidos al ordenador de control remoto y mostrados en el dispositivo de visualización del control remoto. El dispositivo de visualización del control remoto muestra, por tanto, también el estado actual del sistema de arma para el operario.
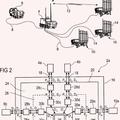
En caso de que la unidad de combate presente otros ordenadores de sistema para el manejo y/o el control del sistema de arma o de la unidad de combate, en una realización ventajosa pueden también estos ser controlados a distancia mediante el ordenador de control remoto. Para ello los otros ordenadores del sistema pueden estar conectados entre sí, así como con el ordenador de dirección de fuego, mediante una conexión basada en TCP/IP. Por tanto, también estos pueden ser controlados a distancia en particular mediante el protocolo de escritorio remoto.
Es especialmente ventajoso si a cada ordenador del sistema es asignado un ordenador de control remoto, de manera que se consiga un manejo mejorado en el control remoto.
Un ejemplo de realización posible de la invención será descrito en virtud de las figuras 1 y 2. Muestran:
Fig. 1, un diagrama de bloques de un sistema de arma controlado a distancia, y
Fig. 2, un diagrama de bloques de un sistema de arma controlado a distancia en una realización ampliada.
La Fig. 1 muestra un diagrama de bloques de un sistema de arma controlado a distancia en un vehículo de combate 1. El vehículo de combate 1 presenta en la cabina del conductor un ordenador del sistema de arma para el control del sistema de arma, el cual actúa como ordenador de dirección del fuego, al que están conectados un monitor como dispositivo de visualización del sistema de arma 11 y un teclado como dispositivo de entrada del sistema de arma 12. Mediante estos componentes un operario puede preparar y activar un comando de fuego. Además, el vehículo de combate 1 presenta un ordenador del sistema 30, al que están conectados un monitor como dispositivo de visualización del sistema 11 y un ratón de ordenador como dispositivo de entrada del sistema 11. Mediante estos componentes un operario puede controlar los movimientos del vehículo de combate 1. El ordenador del sistema 30 comprende las siguientes funciones:
-Ejecuciones de comandos de fuego (sin cálculo balístico) .
-Anclado/desanclado del arma.
-Conectar el sistema de arma en disposición de funcionamiento/combate.
-Desplazar los motores/brazos de robot a la posición indicada.
-Control de la carga y descarga del sistema de arma.
-Comprobación del sistema.
En ambos ordenadores 10, 30 corre el sistema operativo Windows XP, además está instalado un software de escritorio remoto.
Para el... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de control remoto de un sistema de arma de un vehículo de combate (1) con un ordenador del sistema de arma (10) que actúa sobre los dispositivos de orientación del sistema de arma, estando conectados al ordenador del sistema de arma (10) un dispositivo de visualización del sistema de arma (11) para mostrar los contenidos de la pantalla y un dispositivo de entrada del sistema de arma (12) , que están dispuestos dentro del vehículo de combate para el control del sistema de arma en un modo de no control remoto, en el que es establecida una conexión de datos entre un ordenador de control remoto (20) al que están conectados el dispositivo de visualización de control remoto (21) y un dispositivo de entrada de control remoto (22) y el ordenador del sistema de arma (10) , caracterizado por que en un modo de control remoto para el control remoto del ordenador del sistema de arma (10) por el ordenador de control remoto (20) los contenidos de pantalla mostrados en el dispositivo de visualización del sistema de arma (11) en el modo de no control remoto son representados al menos parcialmente en el dispositivo de visualización de control remoto (21) y las acciones de entrada que son realizadas por el dispositivo de entrada de control remoto (22) tienen el mismo efecto que las acciones de entrada del dispositivo de entrada del sistema de arma (12) .
2. Procedimiento según la reivindicación 1, caracterizado por que el ordenador del sistema de arma (10) está configurado como servidor de terminal y el ordenador de control remoto (20) actúa como cliente de terminal.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por que en el modo de control remoto todas las funciones del ordenador del sistema de arma (10) son controladas de forma remota por el ordenador de control remoto (30) .
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por que la conexión de datos es realizada como conexión alámbrica.
5. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por que la conexión de datos es realizada como conexión por radio.
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que además del ordenador del sistema de arma (10) la unidad de combate tiene al menos otro ordenador del sistema (30) conectado al ordenador de control remoto (20) para el control remoto con un dispositivo de visualización del sistema (31) incorporado para la operación y/o control del sistema de arma o de la unidad de combate.
7. Procedimiento según la reivindicación 6, caracterizado por que para cada otro ordenador del sistema (30) se emplea otro ordenador de control remoto (20’) con un dispositivo de visualización de control remoto (21’) incorporado para el control remoto del ordenador del sistema (30) correspondiente.
8. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que el control remoto es realizado mediante el protocolo de escritorio remoto.
9. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que el ordenador de control remoto
(20) está configurado como ordenador portátil.
10. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que en el modo de control remoto son transmitidas cíclicamente señales de vida desde el ordenador de control remoto (20) al ordenador del sistema de arma (10) y por que el ordenador del sistema de arma (10) pasa a un estado seguro si las señales de vida no son recibidas correctamente.
Patentes similares o relacionadas:
Método de control de tiro para defensa antiaérea basada en armas de fuego, del 27 de Marzo de 2019, de BAE SYSTEMS BOFORS AB: Método de control de tiro de armas contra blancos aéreos cuando se dirigen hacia un objeto de protección, en el que se conoce la posición […]
Dispositivo de asistencia para el posicionamiento de un sistema de artillería, del 16 de Mayo de 2018, de NEXTER SYSTEMS: Dispositivo de asistencia para el posicionamiento de un sistema de artillería que comprende una artillería provista de su tubo sobre un terreno […]
 Procedimiento de gestión de las capacidades operacionales de una plataforma y dispositivo que aplica este procedimiento, del 19 de Febrero de 2016, de NEXTER SYSTEMS: Procedimiento de gestión de las capacidades operacionales de plataformas, y particularmente de vehículos, y en particular de vehículos de combate, procedimiento en el […]
Procedimiento de gestión de las capacidades operacionales de una plataforma y dispositivo que aplica este procedimiento, del 19 de Febrero de 2016, de NEXTER SYSTEMS: Procedimiento de gestión de las capacidades operacionales de plataformas, y particularmente de vehículos, y en particular de vehículos de combate, procedimiento en el […]
 Procedimiento para el accionamiento de un sistema de defensa antiaérea basado en tierra, del 16 de Diciembre de 2015, de Diehl Defence GmbH & Co. KG: Procedimiento para el accionamiento de un sistema de defensa antiaérea basado en tierra con un grupo de componentes del sistema principal que comprende un sistema de sensores […]
Procedimiento para el accionamiento de un sistema de defensa antiaérea basado en tierra, del 16 de Diciembre de 2015, de Diehl Defence GmbH & Co. KG: Procedimiento para el accionamiento de un sistema de defensa antiaérea basado en tierra con un grupo de componentes del sistema principal que comprende un sistema de sensores […]
DISPOSITIVO DE PROTECCION DE UNA ZONA DE TERRENO CONTRA LAS AMENAZAS ENEMIGAS., del 1 de Febrero de 2007, de TDA ARMEMENTS S.A.S.: Dispositivo de protección de una zona de terreno contra las amenazas enemigas, que incluye tres subconjuntos principales unidos entre ellos por una […]
EVALUACION DE AMENAZAS Y ASIGNACION DE ARMAMENTO AUTOMATICAS BASADAS EN EL CONOCIMIENTO., del 16 de Julio de 2004, de RAYTHEON COMPANY: Método para la asignación automática de armamento que comprende las etapas de: (i) provisión de una base de datos de tipos posibles de blancos […]
SISTEMA DE ARMAS., del 16 de Abril de 2003, de RHEINMETALL W & M GMBH: Sistema de armas con un arma , una instalación de dirección y una unidad de munición disparable con el arma, en donde a) el sistema de armas comprende como mínimo […]
Vehículo militar, del 15 de Abril de 2020, de NEXTER SYSTEMS: Vehículo militar que comprende un brazo articulado con respecto al vehículo por medio de una bisagra ubicada en un primer extremo del brazo , […]