Medición remota de distancias por medio de una señal de sondeo esencialmente repetitiva.
Un procedimiento para la medición remota de distancias de objetos que reflejan señales,
con relación a un transceptor(200) de señales, que comprende:
transmitir una señal (E) de sondeo, que está basada en una primera señal (x1) que es repetida con cierta regularidad,recibir una señal (e) portadora de información, que constituye una versión reflejada de la señal (E) de sondeo transmitida,
que ha sido reflejada desde al menos un objeto reflectante,
generar una señal primaria (P1(x1)) sobre la base de la primera señal (x1),
generar una señal secundaria (P2) sobre la base de la señal (e) portadora de información, y
procesar la señal primaria (P1(x1)) y la señal secundaria (P2(x1,x2)), por lo cual se determina al menos una entre unadistancia (Y(t)) y una velocidad relativa (V(t)) para el, al menos, un objeto reflectante, caracterizado por
añadir una señal (x2) de ruido a una entre la señal (E) de sondeo transmitida y la señal (e) portadora de información, demodo que la señal secundaria (P2(x1,x2)) incluya un componente de señal basado en la primera señal (x1), así como uncomponente de señal basado en la señal (x2) de ruido, donde el procesamiento de señales implica:
demodular por cuadratura la señal primaria (P1(x1)) para obtener componentes (R1, RQ) de señal demoduladaprimaria, y
demodular por cuadratura la señal secundaria (P2(x1, x2)) para obtener componentes (SI, SQ) de señal demoduladasecundaria,
digitalizar los componentes (RI, RQ) de señal demodulada primaria en componentes (D11, D1Q) de señal digital primaria, ydigitalizar los componentes (SI, SQ) de señal demodulada secundaria en componentes (D2I, D2Q) de señal digitalsecundaria,
correlacionar entre los componentes (D11, D1Q) de señal digital primaria y los componentes (D2I, D2Q) de señal digitalsecundaria, por lo cual se genera una señal (RC(TR,t)) de correlación, y
procesar la señal (RC(TR,t)) de correlación, por lo cual se genera la información Y(t) de distancia referida a al menos unobjeto reflectante, y
en donde la digitalización de los componentes de señal demodulada primaria y secundaria se realiza a una bajaresolución con respecto a la información de amplitud en la señal primaria (P1(x1)) y la señal secundaria (P2(x1, x2)),respectivamente.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2002/000578.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: AXELSSON,SUNE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan la transmisión de ondas continuas, tanto moduladas en amplitud, en frecuencia o en fase, como no moduladas.
- G01S13/58 G01S 13/00 […] › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G01S13/87 G01S 13/00 […] › Combinaciones de sistemas de radar, p. ej. radar primario y radar secundario.
PDF original: ES-2412131_T3.pdf
Fragmento de la descripción:
Medición remota de distancias por medio de una señal de sondeo esencialmente repetitiva Antecedentes de la invención y técnica anterior
La presente invención se refiere, en general, a la medición remota de distancias por medio de una señal recibida en un transceptor de señales. Específicamente, la invención se refiere a la medición remota de distancias de objetos que reflejan señales con relación a un transceptor de señales, por medio del procedimiento y al transceptor de señales, según los preámbulos de las reivindicaciones 1 y 19, respectivamente. La invención también se refiere a un sistema de antenas grupales digitales, según el preámbulo de la reivindicación 38.
Los transceptores de radar que utilizan una señal determinística de radar han sido conocidos por largo tiempo. La señal determinística de radar, por ejemplo, puede ser generada por medio de la modulación lineal de frecuencia (el llamado gorjeo) , la modulación continua de frecuencia (FMCW = Onda Continua de Modulación de Frecuencia) o un código seudo-aleatorio (p. ej., el código Barker) . Todos estos tipos de señal comparten la característica de ser predecibles, es decir, su estructura está repetida con cierta regularidad.
La Figura 1 muestra un diagrama de bloques sobre un transceptor 100 de radar modulado por ruido, conocido per se. La siguiente descripción de la medición remota de distancias, con referencia a la figura 1, corresponderá a una aplicación de radar, donde un pulso de sondeo transmitido está constituido por una señal de radar, que se propaga a la velocidad de la luz en el medio de transmisión en cuestión. El principio de medición remota de distancias, sin embargo, es aplicable también a otros tipos de señales de sondeo, tales como las ondas sonoras. Naturalmente, estas ondas tienen una velocidad de propagación que es considerablemente menor que la de las correspondientes ondas de radar en todos los medios de transmisión. No obstante, en otros aspectos las condiciones son, en principio, las mismas que en el caso del radar. Las ondas sonoras son ventajosas como señales de sondeo dentro de muchas áreas donde las señales de radar son menos adecuadas, por ejemplo, en aplicaciones de sonar / sodar militares y civiles (para el rastreo de pesca, dragaminas y exploración submarina) y en aplicaciones médicas.
Un generador 101 de ruido genera una señal determinística x (t) , que por una parte es suministrada a un elemento 103 de retardo en forma de una señal de filtración, y por otra parte es transmitida mediante una antena 102 transmisora hacia un objeto 104. El objeto 104 refleja una parte de la señal x (t) de radar hacia el transceptor 100 de radar, donde una señal x (t-T) de radar reflejada es recibida mediante una antena receptora 105. La señal x (t-T) de radar reflejada constituye una versión retardada de la señal x (t) de radar transmitida, donde el retardo es proporcional a la distancia R entre el transceptor 100 de radar y el objeto 104. Un mezclador 106 reúne la señal x (t-T) de radar reflejada y una señal x (t-Tf) de referencia, que ha atravesado el elemento 103 de retardo. El mezclador 106 entrega una señal resultante a un filtro 107 de paso bajo. Dado que el filtro 107 de paso bajo tiene una respuesta h (t) de impulso, la señal Y (t) de salida desde el filtro 107 puede ser descrita por la integral:
donde Tf indica el retardo de la señal x (t) de radar transmitida, que genera el elemento 103 de retardo. El retardo T de la señal x (t-T) de radar reflejada, con relación a la señal x (t) de radar transmitida, es T = 2R / c, donde R = la distancia entre el transceptor 100 de radar y el objeto 104 y c = la velocidad de propagación de la señal de radar, que es igual a la velocidad de la luz en el medio de transmisión en cuestión (por ejemplo, el vacío, el aire, el agua o una capa de suelo) .
Cuando el retardo T de la señal x (t-T) de radar reflejada corresponde al retardo Tf del elemento 103 de retardo, el mezclador 106 genera un potente pico de correlación, que puede ser usado para determinar la distancia R al objeto 104. Siempre que se establezca una denominada ranura de distancia, a una distancia R0 = cTf / 2 y que el objeto atraviese esta ranura R0 de distancia (debido al hecho de que al menos uno entre el objeto 104 y el transceptor 100 se mueve) , la señal de salida del mezclador 106 describe una alta resolución y, con relación al transceptor 100 de radar, una reproducción radial del objeto 104. La resolución !R de distancia para esta reproducción está dada por la relación !R = c / (2B) , donde B = el ancho de banda de señal de la onda de la señal x (t) de radar transmitida, y c representa la velocidad de propagación de la señal x (t) de radar en el medio de transmisión en cuestión.
Mediante la señal emitida desde el filtro 107 de paso bajo, luego es posible determinar el retardo T de la señal x (t-T) de radar reflejada, realizando una búsqueda por medio del retardo Tf del elemento 103 de retardo después del máximo valor de la señal Y (t) de salida. Cuando este valor del retardo Tf del elemento 103 de retardo ha sido determinado, la distancia R al objeto 104 también puede ser calculada según R = cT / 2.
Sin embargo, la búsqueda del máximo valor de la señal Y (t) de salida implica una operación que es relativamente intensa en términos de complejidad de cálculo, lo que produce un retardo comparativamente largo, o bien exige un hardware muy
potente. La solución se torna específicamente intensiva en términos de procesamiento si también la velocidad relativa del objeto 104 debiera determinarse con alta precisión.
Resumen de la invención El objeto de la presente invención es mitigar los problemas anteriores y presentar una solución eficaz de medición remota de distancias para determinar al menos una entre una distancia y una velocidad relativa, con respecto a al menos un objeto reflectante.
Según un aspecto de la invención, este objeto es logrado por el procedimiento inicialmente descrito para la medición remota de distancias de objetos que reflejan señales, que está caracterizado por añadir una señal de ruido a una entre una señal de sondeo transmitida y una señal portadora de información recibida. La señal secundaria incluirá por ello un componente de señal basado en la primera señal, así como un componente de señal basado en la señal de ruido. Esto, a su vez, da como resultado que el procesamiento de señal de la primera señal y de la señal secundaria puede ser realizado de una manera que sea ventajosa en cuanto a la señal, de modo que pueda obtenerse una alta linealidad, también por medio de una muy sencilla digitalización de las señales procesadas.
Según otro aspecto de la invención, este objeto es logrado por el transceptor de señales inicialmente descrito, que está caracterizado en cuanto a que incluye un medio de suma, para sumar una señal de ruido a una entre una señal de sondeo transmitida y una señal portadora de información recibida. Mediante el medio de suma se garantiza que la señal secundaria incluya un componente de señal basado en la primera señal, así como un componente de señal basado en el componente de ruido. El siguiente procesamiento de señales puede ser realizado, por tanto, con una alta linealidad, a la vez que un equipo sencillo puede ser utilizado para digitalizar las señales procesadas.
Según otro aspecto más de la invención, este objeto es logrado por el sistema de antenas grupales digitales inicialmente descrito, que está caracterizado en cuanto a que la abertura de antena incluye al menos dos unidades de antena que están conectadas con un respectivo transceptor de señales propuesto. Preferiblemente, las unidades de antena están distribuidas uniformemente por la abertura de antena. El sistema de antenas grupales también incluye un procesador lobular para recibir una señal de distancia y una señal de velocidad, respectivamente, desde cada uno de los transceptores de señales. En base a estas señales, el procesador lobular genera trozos combinados de información de velocidad y de información de distancia, más información angular referida a objetos que reflejan señales dentro del alcance del sistema.
La invención da como resultado que puede lograrse una eficaz medición remota de distancias, con alta precisión, en aplicaciones de radar, así como en aplicaciones donde se utilizan señales de sondeo acústico, sin requerir ningún componente extremo para digitalizar las señales recibidas. Por el contrario, pueden usarse convertidores de Analógico a Digital (A / D) muy sencillos y robustos. Naturalmente, esto es deseable, dado que el coste de fabricación para el equipo de distancias remotas puede, por tanto, mantenerse o reducirse, a... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para la medición remota de distancias de objetos que reflejan señales, con relación a un transceptor
(200) de señales, que comprende: transmitir una señal (E) de sondeo, que está basada en una primera señal (x1) que es repetida con cierta regularidad, recibir una señal (e) portadora de información, que constituye una versión reflejada de la señal (E) de sondeo transmitida,
que ha sido reflejada desde al menos un objeto reflectante, generar una señal primaria (P1 (x1) ) sobre la base de la primera señal (x1) , generar una señal secundaria (P2) sobre la base de la señal (e) portadora de información, y procesar la señal primaria (P1 (x1) ) y la señal secundaria (P2 (x1, x2) ) , por lo cual se determina al menos una entre una
distancia (Y (t) ) y una velocidad relativa (V (t) ) para el, al menos, un objeto reflectante, caracterizado por añadir una señal (x2) de ruido a una entre la señal (E) de sondeo transmitida y la señal (e) portadora de información, de modo que la señal secundaria (P2 (x1, x2) ) incluya un componente de señal basado en la primera señal (x1) , así como un componente de señal basado en la señal (x2) de ruido, donde el procesamiento de señales implica:
demodular por cuadratura la señal primaria (P1 (x1) ) para obtener componentes (R1, RQ) de señal demodulada primaria, y demodular por cuadratura la señal secundaria (P2 (x1, x2) ) para obtener componentes (SI, SQ) de señal demodulada secundaria, digitalizar los componentes (RI, RQ) de señal demodulada primaria en componentes (D11, D1Q) de señal digital primaria, y
digitalizar los componentes (SI, SQ) de señal demodulada secundaria en componentes (D2I, D2Q) de señal digital secundaria,
correlacionar entre los componentes (D11, D1Q) de señal digital primaria y los componentes (D2I, D2Q) de señal digital secundaria, por lo cual se genera una señal (RC (TR, t) ) de correlación, y
procesar la señal (RC (TR, t) ) de correlación, por lo cual se genera la información Y (t) de distancia referida a al menos un objeto reflectante, y
en donde la digitalización de los componentes de señal demodulada primaria y secundaria se realiza a una baja resolución con respecto a la información de amplitud en la señal primaria (P1 (x1) ) y la señal secundaria (P2 (x1, x2) ) , respectivamente.
2. Un procedimiento según la reivindicación 1, caracterizado por implicar el procesamiento de señales el procesamiento Doppler de la señal de correlación (RC (TR, t) ) , por lo cual se genera la información V (t) de velocidad referida a el al menos un objeto reflectante.
3. Un procedimiento según la reivindicación 2, caracterizado por implicar el procesamiento Doppler la transformación rápida de Fourier.
4. Un procedimiento según la reivindicación 2, caracterizado por implicar el procesamiento Doppler la transformación binaria de Hadamard.
5. Un procedimiento según la reivindicación 1, caracterizado por implicar la digitalización la conversión binaria de analógico a digital (A/D) .
6. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por incluir la señal (E) de sondeo transmitida un barrido lineal de frecuencia.
7. Un procedimiento según una cualquiera de las reivindicaciones 1, 2 o 5, caracterizado por incluir la señal (E) de sondeo transmitida una señal continuamente modulada en frecuencia.
8. Un procedimiento según una cualquiera de las reivindicaciones 1, 2 o 5, caracterizado por incluir la señal (E) de sondeo transmitida una frecuencia por pasos.
9. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por estar modelada por pulsos la señal (E) de sondeo transmitida.
10. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por generar la información (Y (t) ) de distancia
desplazando sistemáticamente los componentes (D2I, D2Q) de señal digital secundaria, con relación a los componentes (D1I, D1Q) de señal digital primaria, y
calculando un valor de correlación para cada desplazamiento respectivo.
11. Un procedimiento según la reivindicación 10, caracterizado por realizarse el desplazamiento de los componentes (D2I, D2Q) de señal digital secundaria en ciertas etapas, donde cada etapa corresponde a una ranura de distancia.
12. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por ser la señal (E) de sondeo una señal de radar.
13. Un procedimiento según una cualquiera de las reivindicaciones 1 a 11, caracterizado por ser la señal (E) de sondeo una señal de sonar.
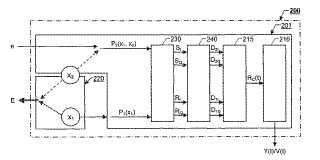
14. Un transceptor (200) de señales para la medición remota de distancias de objetos reflectantes de señales, que comprende un transmisor (220) para transmitir una señal (E) de sondeo basada en una primera señal (x1) , que se repite con cierta regularidad, y un receptor (201) para recibir una señal (e) portadora de información, que ha sido transmitida desde el transmisor (220) y ha sido reflejada por al menos un objeto reflectante, comprendiendo el receptor (201) , a su vez:
un primer medio (202, 203; 207) de generación de señales para recibir la primera señal (x1) y, en base a la misma, generar una señal primaria (P1 (x1) ) ,
un segundo medio (202, 206, 209, 210a, 210b) de generación de señales para recibir la señal (e) portadora de 20 información y, en base a la misma, generar una señal secundaria (P2 (x1, x2) ) , y
un medio (230, 240, 215; 216) de procesamiento de señales para recibir la señal primaria (P1 (x1) ) y la señal secundaria (P2 (x1, x2) ) y, en base a las mismas, generar al menos una entre la información de distancia (Y (t) ) y la información de velocidad relativa (V (t) ) , correspondiente a el al menos un objeto reflectante, caracterizado porque
-el transceptor (200) de señales comprende un medio (209, 210a, 210b) de adición para sumar una señal (x2) de ruido a
una entre la señal (E) de sondeo transmitida y la señal (e) portadora de información, de modo que la señal secundaria (P2 (x1, x2) ) incluya un componente de señal basado en la primera señal (x1) , así como un componente de señal basado en la señal (x2) de ruido,
-el receptor (201) comprende
al menos un demodulador (230; 211, 212) para recibir la señal primaria (P1 (x1) ) y la señal secundaria (P2 (x1, x2) ) 30 y, en base a las mismas, generar al menos un primer componente (RI, RQ) de señal demodulada primaria y al menos un componente (SI, SQ) de señal demodulada secundaria, respectivamente, y
al menos una unidad digitalizadora (240; 213, 214) para recibir el al menos un componente (RI, RQ) de señal demodulada primaria y al menos un componente (SI, SQ) de señal demodulada secundaria y, en base a los mismos, generar al menos un componente (D1I, D1Q) de señal digital primaria y al menos un componente (D2I,
D2Q) de señal digital secundaria, respectivamente, y
un correlacionador (215) para recibir el al menos un componente (D1I, D1Q) de señal digital primaria y el al menos un componente (D2I, D2Q) de señal digital secundaria, y generar una señal (RC (TR, t) ) de correlación sobre la base de el al menso un componente (D1I, D1Q) de señal digital primaria y de el al menos un componente (D2I, D2Q) de señal digital secundaria,
en el que la al menos una unidad digitalizadora (240; 213, 214) tiene una baja resolución con respecto a la información de amplitud en la señal primaria (P1 (x1) ) y la señal secundaria (P2 (x1, x2) ) , respectivamente.
15. Un transceptor (200) de señales según la reivindicación 14, caracterizado porque el receptor (201) comprende un procesador (216) de Doppler para recibir la señal de correlación (RC (TR, t) ) y, mediante el procesamiento de la misma, generar información de velocidad (V (t) ) referida a el al menos un objeto reflectante.
16. Un transceptor (200) de señales según la reivindicación 15, caracterizado porque el procesador (216) de Doppler está adaptado para realizar la transformación rápida de Fourier.
17. Un transceptor (200) de señales según la reivindicación 15, caracterizado porque el procesador (216) de Doppler está adaptado para realizar la transformación binaria de Hadamard.
18. Un transceptor (200) de señales según la reivindicación 15, caracterizado porque el correlacionador (215) está adaptado para generar la señal de correlación (RC (TR, t) ) , correlacionando el al menos un componente (D1I, D1Q) de señal digital primaria con el al menos un componente (D2I, D2Q) de señal digital secundaria.
19. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14, 15 o 18, caracterizado porque la señal (E) de sondeo transmitida incluye un barrido lineal de frecuencia.
20. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14, 15 o 18, caracterizado porque la señal (E) de sondeo transmitida incluye una señal continuamente modulada en frecuencia.
21. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14 a 16, caracterizado porque la señal
(E) de sondeo transmitida incluye una frecuencia por pasos.
22. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14 a 16, caracterizado porque la señal
(E) de sondeo transmitida está modelada por pulsos.
23. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14 a 22, caracterizado porque está incluido en un sistema buscador de objetivos.
24. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14 a 23, caracterizado porque la señal
(E) de sondeo es una señal de sonar.
25. Un transceptor (200) de señales según una cualquiera de las reivindicaciones 14 a 23, caracterizado porque la señal
(E) de sondeo es una señal de radar.
26. Un transceptor (200) de señales según la reivindicación 25, caracterizado porque está incluido en un sistema de radar de reconocimiento.
27. Un transceptor (200) de señales según la reivindicación 25, caracterizado porque está incluido en un sistema de radar de control de incendios.
28. Un transceptor (200) de señales según la reivindicación 14, caracterizado porque la al menos una unidad digitalizadora (240; 213, 214) comprende al menos un convertidor binario de analógico a digital.
29. Un sistema (1400) de antenas grupales digitales que comprende una abertura (1405) de antena, caracterizado porque
la abertura (1405) de antena comprende al menos dos unidades (205a a 205f) de antena que están conectadas con un respectivo transceptor (200a a 200f) de señales, según una cualquiera de las reivindicaciones 14 a 28, y porque las al menos dos unidades (205a a 205f) de antena están distribuidas sobre la abertura (1405) de antena, y
el sistema (1400) de antenas grupales comprende un procesador lobular (1416) para recibir datos (Da a Df) desde cada uno de los transceptores (200a a 200f) de señales y, mediante el procesamiento de los datos (Da a Df) , generar información (Y (t) ) de distancia, información (V (t) ) de velocidad e información angular (+n (t) , +m (t) ) referida a objetos reflectantes de señales.
30. Un sistema de antenas grupales digitales según la reivindicación 29, caracterizado porque las al menos dos unidades (205a a 205f) de antena están colocadas en la abertura (1405) de antena según un patrón de comprobación y a distancias equidistantes (dm, dn) entre sí.
Patentes similares o relacionadas:
Codificador de señal de localización para un dispositivo de señal de localización y procedimiento asociado, del 6 de Mayo de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Codificador de señal de localización para un dispositivo de localización , que funciona en base a una señal de localización con una […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
Disposición de antena para un sistema de radar, del 16 de Octubre de 2019, de SAAB AB: Una disposición de antena para un sistema de radar dispuesto para cubrir un área de vigilancia y que comprende elementos de antena , estando […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento y dispositivo para el procesamiento de señales a base de un mezclador de transmisión, multiplicación de frecuencia y mezcla subarmónica, del 17 de Abril de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para el procesamiento de señales, - en que una señal de entrada (fLO), que existe en un primer componente, es conducida por este primer […]
Dispositivo y procedimiento de mejora de vídeo, del 13 de Marzo de 2019, de THALES NEDERLAND B.V.: Un procedimiento para mejorar la visualización de vídeo de un sistema de vigilancia de vídeo, en el que dicho procedimiento comprende: a. recibir una primera imagen […]