Mecanismo mordaza de sujeción.
Dispositivo (10) quirúrgico que comprende:
un conjunto (13,
413) mango que incluye un eje (90, 490) de accionamiento, un mango (18) estacionario y unmango (20, 420) móvil, en el que el mango móvil está asociado operativamente con el eje de accionamiento demanera que el movimiento del mango móvil 5 efectúa un movimiento axial del eje de accionamiento;un miembro (14) alargado, que se extiende distalmente desde el conjunto mango, en el que el miembroalargado define un eje longitudinal;
un conjunto (27) herramienta, montado a un extremo distal del miembro alargado, en el que el conjuntoherramienta tiene un conjunto (26) cartucho que tiene una pluralidad de grapas soportadas en su interior y unconjunto (28) yunque, en el que al menos uno de entre el conjunto yunque y el conjunto cartucho es móvil enrelación con el otro entre las posiciones abierta y cerrada;
un mecanismo de selección de modo configurado para alternar el dispositivo quirúrgico entre un primer modode funcionamiento y un segundo modo de funcionamiento, en el que el mecanismo de selección de modoincluye un conmutador para seleccionar entre el primer modo de funcionamiento, en el que el conjunto cartuchoy el conjunto yunque pueden ser movidos hacia atrás y hacia delante entre las posiciones abierta y cerrada, y elsegundo modo de funcionamiento, en el que el conjunto cartucho y el conjunto yunque pinzan el tejido;caracterizado por que el dispositivo comprende además
un conjunto (107) leva asociado operativamente con un trinquete (120, 430) vertical, en el que el trinquetevertical puede ser movido desde una primera posición, acoplado con el eje de accionamiento para prevenir elmovimiento axial del eje de accionamiento, y la segunda posición, desacoplado del eje de accionamiento parapermitir el movimiento axial del eje de accionamiento; en el que el conjunto leva incluye una articulación (508)distal asociada operativamente con el trinquete vertical; y
un brazo (516) móvil entre una primera posición, acoplado con el eje de accionamiento, y una segundaposición, desacoplado del eje de accionamiento, en el que el conjunto leva está configurado para mover eltrinquete vertical a su segunda posición tras el movimiento del mango móvil cuando el brazo está en su primeraposición, y desde su segunda posición a su primera posición tras el movimiento del mango móvil cuando elbrazo está en su segunda posición, en el que la articulación distal es móvil desde una posición proximal a unaposición distal, para mover el trinquete vertical a su segunda posición tras el movimiento del mango móvilcuando el brazo está en su primera posición, y móvil a la posición proximal de manera que el trinquete verticalse mueve a su primera posición tras el movimiento del mango móvil cuando el brazo está en su segundaposición.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09250137.
Solicitante: Covidien LP .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 15 HAMPSHIRE STREET MANSFIELD, MA 02048 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SCIRICA, PAUL, A., BEARDSLEY,JOHN W.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/068 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Grapadoras quirúrgicas (para realizar anastomosis A61B 17/115).
PDF original: ES-2394139_T3.pdf
Fragmento de la descripción:
Mecanismo mordaza de sujeción.
Antecedentes
1. Campo técnico La presente divulgación se refiere a un dispositivo de grapado quirúrgico y, más particularmente, a un dispositivo de grapado quirúrgico endoscópico configurado para hacer funcionar un conjunto herramienta en un modo de sujeción independiente de un modo de pinzamiento y/o de disparo.
2. Antecedentes de la técnica relacionada Los dispositivos quirúrgicos en los que el tejido es sujetado o pinzado, en primer lugar, entre una estructura de mordazas opuestas y, a continuación, es unido mediante sujeciones quirúrgicas, son bien conocidos en la técnica. Típicamente, las sujeciones tienen forma de grapas quirúrgicas, pero pueden utilizarse también sujeciones poliméricas de dos partes.
Los instrumentos para este propósito pueden incluir un conjunto herramienta con dos miembros alargados que se usan, respectivamente, para capturar o pinzar el tejido. Típicamente, uno de los miembros transporta un cartucho de grapas que alberga una pluralidad de grapas dispuestas, por ejemplo, en al menos dos filas laterales mientras que el otro miembro tiene un yunque que define una superficie para formar las patas de la grapa conforme las grapas son impulsadas desde el cartucho de grapas. En algunas grapadoras, la operación de grapado es efectuada por barras de leva que se desplazan longitudinalmente a través del cartucho de grapas, con las barras de leva que actuando sobre los elementos de empuje de grapas para expulsar secuencialmente las grapas desde el cartucho de grapas. Un cuchillo puede desplazarse entre las filas de grapas para cortar longitudinalmente el tejido grapado entre las filas de grapas. Dichas grapadoras se divulgan en las patentes US Nos. 6.250.532 y 6.241.139.
Un dispositivo según el preámbulo de la reivindicación 1 se divulga en el documento 2005/037329.
En los procedimientos endoscópicos o laparoscópicos, la cirugía es realizada a través de pequeñas incisiones o a través de cánulas de pequeño diámetro insertadas a través de pequeñas heridas de entrada en la piel. Debido al limitado grado de movimiento de un instrumento, cuando es posicionado a través de la piel, puede ser bastante difícil para un cirujano manipular el conjunto herramienta del instrumento alrededor del tejido corporal para acceder y/o pinzar el sitio del tejido. Se han desarrollado instrumentos que tienen partes cuerpo endoscópicas giratorias y conjuntos herramienta giratorios y/o articulables para superar este problema, y están disponibles comercialmente. Aunque estos instrumentos proporcionan mejoras considerables en la técnica de las herramientas endoscópicas, son deseables mejoras adicionales que puedan reducir el tiempo requerido por los procedimientos quirúrgicos y que permitan un acceso más fácil a los sitios de tejido.
Consiguientemente, existe una necesidad continua de un dispositivo quirúrgico endoscópico o laparoscópico que tenga un conjunto herramienta que pueda ser manipulado rápida y fácilmente entre diferentes modos de funcionamiento.
Resumen La invención se refiere a un dispositivo según la reivindicación 1.
Según la presente divulgación, se proporciona un dispositivo de grapado quirúrgico que incluye un conjunto mango que tiene un mango móvil, un miembro alargado, y una unidad de carga desechable ("UCD") . La UCD incluye un conjunto herramienta posicionado en un extremo distal que tiene un conjunto yunque y un conjunto cartucho. El miembro alargado está asegurado giratoriamente al conjunto mango. El conjunto herramienta es un dispositivo de grapado y el conjunto mango incluye un trinquete de sujeción que es móvil para acoplarse con un eje de accionamiento o miembro de accionamiento para permitir que el conjunto herramienta sea operado en un modo de sujeción. Más específicamente, el trinquete de sujeción es manipulado por un par de botones deslizantes posicionados, de manera deslizante, en lados opuestos del conjunto mango y es movible, de manera selectiva, para acoplarse con el eje de accionamiento para permitir que el eje de accionamiento se mueva una distancia que, tras la operación del mango móvil, realiza una aproximación de los conjuntos cartucho y yunque del conjunto herramienta, pero no afectará al disparo de las grapas.
En otro aspecto de la divulgación, un miembro de control de rotación está montado, de manera giratoria, al extremo delantero del conjunto mango para facilitar la rotación del miembro alargado con respecto al conjunto mango.
En otro aspecto de la presente divulgación, un dispositivo quirúrgico comprende un efector final, un eje endoscópico que define un eje longitudinal, y un conjunto mango. El conjunto mango comprende un miembro de accionamiento desplazable movible longitudinalmente y un mango pivotable que tiene un miembro de acoplamiento montado, de manera móvil, con respecto al mango pivotable y dispuesto para pivotar con el mango pivotable. El dispositivo incluye también un botón presionable dispuesto para acoplarse con el miembro de acoplamiento y para mover el miembro de acoplamiento entre una primera posición, en la que el miembro de acoplamiento mueve el miembro de accionamiento longitudinalmente, y una segunda posición, en la que el miembro de acoplamiento no mueve el miembro de accionamiento.
El miembro de acoplamiento, en ciertas realizaciones, tiene un brazo montado, de manera deslizante, en el mango pivotable y un trinquete montado, de manera pivotante, con respecto al brazo. El miembro de accionamiento tiene una pluralidad de dientes y el trinquete se desliza sobre los dientes cuando el miembro de acoplamiento está en la segunda posición. El trinquete se acopla con los dientes cuando el miembro de acoplamiento está en la primera posición.
El conjunto mango puede tener un trinquete de avance movible con el mango pivotable y desviado para acoplarse con el miembro de accionamiento. El trinquete de avance está dispuesto para acoplarse con los dientes del miembro de accionamiento y mueve longitudinalmente el miembro de accionamiento cuando el miembro de acoplamiento está en la segunda posición.
En ciertas realizaciones, el dispositivo quirúrgico tiene un miembro de bloqueo desplazado para acoplarse con el miembro de accionamiento, para prevenir el movimiento longitudinal del miembro de accionamiento. Un conjunto de desconexión, que tiene una parte escalonada en ángulo, está dispuesto para acoplarse al miembro de bloqueo y para mover el miembro de bloqueo lejos del miembro de accionamiento. El conjunto de desconexión incluye una primera articulación, que tiene la parte escalonada en ángulo, y una segunda articulación fijada, de manera pivotante, a la primera en un primer extremo y fijada, de manera pivotante, al mango pivotable en un segundo extremo de la segunda articulación. La primera articulación y la segunda articulación están dimensionadas de manera que la parte escalonada en ángulo no se acopla al miembro de bloqueo cuando el miembro de acoplamiento está en la primera posición.
En todavía otro aspecto de la divulgación, hay una palanca de articulación montada contigua al miembro de control de rotación para facilitar la articulación del conjunto herramienta.
Breve descripción de los dibujos Las realizaciones del dispositivo de grapado quirúrgico divulgado actualmente se divulgan en la presente memoria con referencia a los dibujos, en los que: La Fig. 1 es una vista lateral, en perspectiva, del dispositivo de grapado quirúrgico divulgado actualmente;
La Fig. 2 es una vista ampliada de la zona indicada del detalle mostrado en la Fig. 1; La Fig. 3 es una vista lateral, en perspectiva, del extremo proximal del dispositivo de grapado quirúrgico mostrado en la Fig. 1, con partes separadas;
La Fig. 4 es una vista posterior, en sección transversal, en perspectiva, tomada a lo largo la línea de sección 4-4 de la Fig. 1; La Fig. 5 es una vista ampliada de la zona indicada del detalle mostrado en la Fig. 3; La Fig. 6 es una vista en perspectiva del soporte de muelle de la Fig. 5; La Fig. 7 es una vista en perspectiva del trinquete vertical de la Fig. 5; La Fig. 8 es una vista en perspectiva de la leva de bloqueo de la Fig. 5; La Fig. 9 es una vista ampliada de la zona indicada del detalle mostrado en la Fig. 3;
La Fig. 10 es una vista inferior, en perspectiva, de la cremallera dentada de la Fig. 3; La Fig. 11 es una vista lateral, en perspectiva, del brazo del trinquete de sujeción girado 90º con respecto a la representación mostrada en la Fig. 9;
La Fig. 12 es una vista lateral del dispositivo de grapado quirúrgico mostrado en la Fig. 1; La Fig. 13 es una vista ampliada de la zona indicada del detalle mostrado en la Fig. 12; La Fig. 14 es una vista lateral,... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo (10) quirúrgico que comprende:
un conjunto (13, 413) mango que incluye un eje (90, 490) de accionamiento, un mango (18) estacionario y un mango (20, 420) móvil, en el que el mango móvil está asociado operativamente con el eje de accionamiento de manera que el movimiento del mango móvil efectúa un movimiento axial del eje de accionamiento;
un miembro (14) alargado, que se extiende distalmente desde el conjunto mango, en el que el miembro alargado define un eje longitudinal;
un conjunto (27) herramienta, montado a un extremo distal del miembro alargado, en el que el conjunto herramienta tiene un conjunto (26) cartucho que tiene una pluralidad de grapas soportadas en su interior y un conjunto (28) yunque, en el que al menos uno de entre el conjunto yunque y el conjunto cartucho es móvil en relación con el otro entre las posiciones abierta y cerrada;
un mecanismo de selección de modo configurado para alternar el dispositivo quirúrgico entre un primer modo de funcionamiento y un segundo modo de funcionamiento, en el que el mecanismo de selección de modo incluye un conmutador para seleccionar entre el primer modo de funcionamiento, en el que el conjunto cartucho y el conjunto yunque pueden ser movidos hacia atrás y hacia delante entre las posiciones abierta y cerrada, y el segundo modo de funcionamiento, en el que el conjunto cartucho y el conjunto yunque pinzan el tejido;
caracterizado por que el dispositivo comprende además un conjunto (107) leva asociado operativamente con un trinquete (120, 430) vertical, en el que el trinquete vertical puede ser movido desde una primera posición, acoplado con el eje de accionamiento para prevenir el movimiento axial del eje de accionamiento, y la segunda posición, desacoplado del eje de accionamiento para permitir el movimiento axial del eje de accionamiento; en el que el conjunto leva incluye una articulación (508) distal asociada operativamente con el trinquete vertical; y
un brazo (516) móvil entre una primera posición, acoplado con el eje de accionamiento, y una segunda posición, desacoplado del eje de accionamiento, en el que el conjunto leva está configurado para mover el trinquete vertical a su segunda posición tras el movimiento del mango móvil cuando el brazo está en su primera posición, y desde su segunda posición a su primera posición tras el movimiento del mango móvil cuando el brazo está en su segunda posición, en el que la articulación distal es móvil desde una posición proximal a una posición distal, para mover el trinquete vertical a su segunda posición tras el movimiento del mango móvil cuando el brazo está en su primera posición, y móvil a la posición proximal de manera que el trinquete vertical se mueve a su primera posición tras el movimiento del mango móvil cuando el brazo está en su segunda posición.
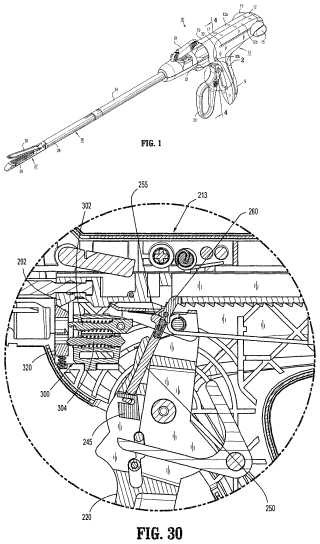
2. Dispositivo quirúrgico según la reivindicación 1, en el que el conjunto leva comprende un miembro (304) de desconexión y un gatillo (302) de trinquete, en el que el gatillo de trinquete está asociado operativamente con el trinquete vertical en el primer modo de funcionamiento, en el que el miembro de desconexión está asociado operativamente con el trinquete vertical en el segundo modo de funcionamiento, en el que el gatillo de trinquete está configurado para mover el trinquete vertical a su segunda posición tras el movimiento del mango móvil cuando el brazo está en su primera posición, en el que el miembro de desconexión está configurado para mover el trinquete vertical desde su segunda posición a su primera posición tras el movimiento del mango móvil cuando el brazo de trinquete está en su segunda posición.
3. Dispositivo quirúrgico según la reivindicación 1, en el que el movimiento del mango móvil cuando el brazo está en su primera posición efectúa el movimiento del conjunto herramienta entre las posiciones abierta y cerrada, y en el que el movimiento del mango móvil alejándose del mango estacionario cuando el brazo está en su segunda posición mantiene el conjunto herramienta en la posición cerrada y al menos un movimiento posterior del mango móvil hacia el mango estacionario cuando el brazo está en su segunda posición dispara grapas desde el conjunto herramienta.
4. Dispositivo quirúrgico según la reivindicación 1, en el que el conmutador comprende al menos un botón (514) de accionamiento soportado, de manera deslizante, en el mango móvil, en el que el botón de accionamiento está asociado operativamente con el brazo y está configurado para moverse linealmente entre una posición centrada, para mover el brazo a su primera posición, y una posición descentrada para mover el brazo a su segunda posición.
5. Dispositivo quirúrgico según la reivindicación 1, en el que la primera posición del brazo está asociada con un primer modo de funcionamiento del dispositivo y la segunda posición del brazo está asociada con un segundo modo de funcionamiento del dispositivo.
6. Dispositivo quirúrgico según la reivindicación 1, en el que cuando el brazo está en su segunda posición, un
mecanismo de avance del eje de accionamiento avanza el eje de accionamiento en una dirección distal tras el movimiento del mango móvil para mover el conjunto herramienta a la posición cerrada, y en el que tras el movimiento subsiguiente del mango móvil el mecanismo de avance del eje de accionamiento se acopla al eje de accionamiento para disparar grapas desde el conjunto herramienta.
7. Dispositivo quirúrgico según la reivindicación 1, en el que el movimiento del mango móvil durante el primer modo de funcionamiento efectúa el movimiento del conjunto herramienta entre las posiciones abierta y cerrada, y en el que el movimiento del mango móvil alejándose del mango estacionario durante el segundo modo de funcionamiento mantiene el conjunto herramienta en la posición cerrada y al menos un movimiento subsiguiente del mango móvil hacia el mango estacionario durante el segundo modo de funcionamiento dispara grapas desde el conjunto herramienta.
Patentes similares o relacionadas:
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Mecanismo de suministro y bloqueo de elemento de fijación quirúrgico, del 1 de Julio de 2020, de Via Surgical Ltd: Un dispositivo para suministrar una pluralidad de elementos de fijación quirúrgicos , uno a la vez, en el tejido de un paciente, comprendiendo el dispositivo: […]
Instrumentos quirúrgicos articulados, del 10 de Junio de 2020, de C.R. BARD, INC.: Un instrumento quirúrgico que comprende: un mango ; y un conjunto de eje alargado que se extiende distalmente desde el mango , […]
Grapadora circular y componente de grapa de la misma, del 3 de Junio de 2020, de Touchstone International Medical Science Co., Ltd: Un conjunto de cabezal de grapas que comprende: un cartucho anular de grapas que comprende una pluralidad de agujeros de grapas en una cara de extremo del […]
Dispositivo de grapado quirúrgico con deflexión controlada de la viga, del 15 de Abril de 2020, de Covidien LP (100.0%): Un dispositivo de grapado quirúrgico , que comprende: una sección media de yunque que define un eje longitudinal y una superficie de contacto con el tejido […]
Injerto de endoprótesis con elementos de fijación y sistema de introducción, del 1 de Abril de 2020, de JOTEC GMBH: Injerto de endoprótesis para la introducción en un vaso sanguíneo de un paciente, con un cuerpo cilíndrico hueco con un lado de […]
Procedimiento y sistema para proporcionar recomendaciones para la ejecución óptima de procedimientos quirúrgicos, del 25 de Marzo de 2020, de CHILDREN'S NATIONAL MEDICAL CENTER: Un procedimiento para proporcionar información para un procedimiento médico quirúrgico, comprendiendo el procedimiento: adquirir, usando circuitería, […]
Instrumento quirúrgico con unidad de carga reemplazable, del 11 de Diciembre de 2019, de Covidien LP (100.0%): Un instrumento quirúrgico , que comprende: un alojamiento alargado que tiene un extremo proximal y un extremo distal; una […]