MECANISMO DE AJUSTE DE LA FUERZA DE PRETENSIÓN EN SISTEMAS DE TRANSMISIÓN CORREA-POLEA.
Mecanismo simple y compacto que permite tensar las correas que transmiten la potencia un eje motriz a un eje seguidor.
Este mecanismo proporciona medios para variar y fijar la distancia entre el eje motriz y el eje seguidor manteniéndolos sustancialmente paralelos. El empleo del mecanismo propuesto no presenta pérdidas debidas al contacto con un elemento tensor adicional y se obtiene un par de tracción similar en los dos sentidos de giro que permite graduar la tensión deseada de forma precisa.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230483.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: JARDON HUETE,ALBERTO, BALAGUER BERNALDO DE QUIROS,CARLOS, PABÓN,Luis Alberto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H7/14 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 7/00 Transmisiones para transmitir un movimiento por órganos flexibles sin fin (particulares para transmitir un movimiento rotativo con relación de velocidad variable o para invertir un movimiento rotativo F16H 9/00). › de una polea motriz o de una polea propulsada.
Fragmento de la descripción:
Mecanismo de ajuste de la fuerza de pretensión en sistemas de transmisión correa-polea.
CAMPO TÉCNICO
La presente invención propone un mecanismo de ajuste para tensar las correas de los sistemas de transmisión correa-polea libre de pérdidas. El campo de aplicación comprende a los mecanismos que emplean el sistema correa-polea como método de transmisión de potencia, y particularmente a aquellos mecanismos de transmisión que se emplean en sistemas robóticos.
ESTADO DE LA TÉCNICA
Las trasmisiones por correa son muy empleadas en mecanismos accionados por motor, puesto que tienen múltiples ventajas cuando funcionan con propiedad. Estos mecanismos transmiten potencia entre ejes paralelos separados y permiten obtener pequeños valores de reducción de transmisión entre el eje motriz y el eje seguidor. A su vez actúan como separador físico entre la etapa de baja potencia y la etapa de alta potencia, tienen un funcionamiento suave y silencioso, y son usados como un fusible mecánico debido a que presentan una carga límite de transmisión que, al ser superada, produce el resbalamiento entre la correa y la polea.
Se ha de tener en cuenta la tensión de montaje de las correas, llamada fuerza de pretensión condiciona la vida de la correa, la carga sobre los ejes, el nivel de ruido y la transmisión efectiva de potencia, asegurando además un correcto engranaje de los dientes de la correa en la polea conducida. Un valor de la fuerza de pretensión que puede ser adecuado es aquel que produce las menores vibraciones en el ramal libre o menor tensionado. Este valor puede depender de la fuerza tangencial máxima, la longitud y rigidez de la correa, el número de dientes de la transmisión y/o la geometría del sistema de accionamiento.
Además, las correas son elementos flexibles que se alargan con el uso, y no se pueden tensar al extremo, puesto no transmitiría par de manera eficiente y se estaría sobrecargando radialmente a los ejes.
Junto con estas consideraciones previas, diversos efectos hacen necesario un ajuste de la fuerza de pretensión. Cuando la correa presenta una pretensión insuficiente y las poleas giran muy rápido y con baja carga, hay una tendencia de los dientes de la correa a montarse sobre los dientes de la polea (en el ramal flojo) , además de un desgaste de los flancos debido al rozamiento durante el engranado de los dientes. Si la correa gira muy lento pero con altas cargas, puede que el agarre entre los dientes no sea suficiente para transmitir el par necesario, y por tanto los dientes de la correa se desengranan de los dientes de la polea por el ramal de tracción. En cambio, si la fuerza de pretensión es excesiva, aumentará la carga sobre los ejes, reduciendo la potencia efectiva a transmitir y habrá un desgaste prematuro del diente de la correa, de tal manera que el motor se verá muy afectado.
En consecuencia, para que la transmisión por correas presente durante su funcionamiento las virtudes mencionadas anteriormente, un buen mecanismo de tensado debe contar con unas medidas muy precisas de las distancia entre los ejes y los diámetros de poleas, según el tamaño de la correa. Esto es algo difícil de lograr, debido a la acumulación de todas las tolerancias que acarrean y se acumulan durante la construcción de los sistemas mecánicos.
Por tal motivo es común usar mecanismos tensores, que absorben estos errores de precisión tensando la correa. Sin embargo, los tensores más empleados hasta ahora, usan un mecanismo que tensa la correa mediante el contacto directo de un disco o una rueda con la correa. Este elemento es graduado generalmente mediante tornillos o muelles. Los mecanismos graduados mediante tornillos, son mecanismos complicados de graduar, y se desajustan muy fácilmente; los mecanismos que son graduados mediante muelles, con el uso pierden su presión, perdiendo su funcionalidad.
Otro inconveniente, y de gran problemática de cara a la robótica, es que los tensores de contacto hacen asimétrica la transmisión, es decir, bajo una misma carga el motor necesita diferente par para girar a la derecha que para girar a la izquierda, porque existe un elemento adicional en uno de los ramales de la transmisión, lo que hace difícil un control robusto en las articulaciones de cualquier sistema automatizado o robotizado. En general, para estos mecanismos de tensión, es común encontrar fallos después de un período de uso.
Además, estos mecanismos presentan elementos adicionales que pueden aumentar el peso del sistema de transmisión, por lo que presentan inconvenientes cuando se aplican al campo de la robótica, donde el peso de los sistemas de transmisión debe ser minimizado dentro de lo posible.
RESUMEN DE LA INVENCIÓN
Es objeto de la invención solucionar los problemas para ajustar la fuerza de pretensión que impiden aprovechar todas las ventajas de un sistema de transmisión por correa, así como minimizar las pérdidas en el sistema de transmisión debidas al uso de elementos externos y la distribución asimétrica de la transmisión. Estos y otros problemas son solucionados en la presente invención mediante un mecanismo para pretensar las correas de los sistemas de transmisión correa-polea según la reivindicación 1 independiente. En un segundo aspecto inventivo se reivindica un sistema de transmisión correa-polea capaz de ajustar la fuerza de pretensión según la reivindicación 13 independiente. En un tercer aspecto se proporciona un método según la reivindicación independiente 14. Además, otros aspectos de la invención y realizaciones particularmente ventajosas de la misma se encuentran descritos en las reivindicaciones dependientes.
En un primer aspecto, la presente invención proporciona un mecanismo de ajuste de la fuerza de pretensión en sistemas de transmisión correa-polea que permite regular la distancia entre el eje motriz y el eje seguidor. En este contexto se entiende regular la distancia como la acción que comprende variar la distancia entre el eje motriz y el eje seguidor y fijar esta distancia. Esta regulación de la distancia proporciona una variación precisa y fiable de la distancia entre las poleas asociadas a los ejes motriz y seguidor. La fuerza de pretensión resultante sobre la correa es simétrica respecto a los sentidos de giro y no presenta pérdidas en las correas de trasmisión de par, puesto que no existen elementos externos como los tensores, y se evitan las pérdidas de par del motor debidas al roce de elementos como los tensores sobre la correa.
Esta invención consigue pretensar de una forma controlada la correa de transmisión sin utilizar un mecanismo como un tensor externo para proporcionar una carga de pretensión sobre la correa, ya que se regula la distancia entre el eje motriz y el eje seguidor. Para regular la distancia entre estos dos ejes, la invención proporciona medios de constricción o guía de los movimientos de ambos ejes de forma que se varía la distancia entre los mismos mientras se mantienen dichos ejes paralelos.
El movimiento de un eje respecto a otro se constriñe mediante medios de guía que comprenden dos piezas: una primera pieza móvil que se desplaza sobre una segunda pieza fija y que está unida de forma solidaria a un primer eje, que puede ser el eje motriz o el eje seguidor Cuando ambas piezas se mueven cambia la distancia entre el primer eje y el segundo eje, de tal forma que se regula con precisión la distancia entre ambos ejes evitando una distribución asimétrica del par para girar de derecha a izquierda o de izquierda a derecha.
En una realización, el movimiento de la pieza móvil de dicho medio de guía viene determinado por la cooperación entre la pieza fija y la pieza móvil. Esta cooperación fuerza una trayectoria de la pieza móvil constreñida sobre al menos parte de una circunferencia, alrededor de cuyo eje (eje de giro) rota uno de los ejes dando lugar a un movimiento relativo de este primer eje rotante respecto al segundo eje. Mientras que el eje de giro de este primer eje no coincida con el segundo eje (sean excéntricos) , la distancia T entre el primer eje y el segundo eje cambia al variar la posición de la segunda pieza móvil en la circunferencia en función de:
- la distancia del primer eje rotante al eje de giro, R;
- la distancia del eje de giro al eje segundo eje, C; y
- el ángulo f subtendido entre las líneas que une el eje motriz con el eje de giro y el eje seguidor con el eje de giro.
Si además C y R tienen un valor constante, la mínima variación de la distancia T entre el primer eje y el segundo eje está dada por la diferencia entre el espaciamiento angular de ambas.
Aunque C y R sean constantes, no necesariamente C debe ser igual a R, pues sus valores dependerán...
Reivindicaciones:
1. Mecanismo de ajuste de la fuerza de pretensión para sistemas de transmisión de potencia entre poleas mediante correa, en donde el sistema de transmisión comprende:
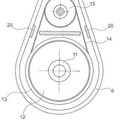
- una correa; -un eje motriz (11) que comprende una primera polea; y -un eje seguidor (12) que comprende una segunda polea;
en el que el eje motriz (11) y el eje seguidor (12) son sustancialmente paralelos estando caracterizado dicho mecanismo porque comprende medios de regulación de la distancia entre estos dos ejes.
2. Mecanismo según la reivindicación precedente en el que los medios de regulación de la distancia entre el
eje motriz (11) y el eje seguidor (12) comprenden: -medios de constricción o de guía de la posición de al menos uno de los ejes; y -medios de fijación que mantienen fija la distancia entre el eje motriz (11) y el eje seguidor (12) .
3. Mecanismo según la reivindicación precedente en el que los medios de guía comprenden una pieza fija (15, 15’) y una pieza móvil (16, 16’) unida solidariamente bien al eje seguidor (12) , bien al eje motriz (11) .
4. Mecanismo según la reivindicación precedente en el que la pieza móvil (16’) se desplaza a lo largo de un pieza fija (15’) dando lugar a una trayectoria curvada o recta.
5. Mecanismo según la reivindicación precedente en el que los medios de guía constriñen el movimiento de la pieza móvil (16, 16’) a una rotación alrededor de un tercer eje de giro (17, 17’) , paralelo al eje motriz (11) y al eje seguidor, en el que el eje de giro (17, 17’) no coincide con el eje motriz (11) o con el eje seguidor (12) .
6. Mecanismo según cualquiera de las reivindicaciones 3-5 en el que la pieza fija (15, 15’) comprende medios de fijación para fijar la pieza móvil (16, 16’) en al menos dos posiciones distintas.
7. Mecanismo según la reivindicación precedente en las que la distancia entre las posiciones para fijar la distancia entre la pieza móvil (16, 16’) y la pieza fija (15, 15’) es sustancialmente regular.
8. Mecanismo según la reivindicación 6 en el que la pieza fija (15’) es una canal sustancialmente circular cuyo centro se corresponde con el eje de giro y la pieza móvil (16’) se desplaza a lo largo de dicho canal.
9. Mecanismo según la reivindicación precedente en el que -la pieza fija (15’) comprende N agujeros situados en un arco de circunferencia centrada en el eje de giro espaciados una distancia sustancialmente uniforme x sobre dicho arco de circunferencia (18’) , y -la pieza móvil (16’) comprende n agujeros situados en un arco de circunferencia centrada en el eje de giro espaciados una distancia sustancialmente uniforme X sobre dicho arco de circunferencia, siendo la distancia entre agujeros de la pieza fija (15’) sustancialmente distinta a la distancia entre agujeros de la pieza móvil (16’) .
10. Mecanismo de regulación según la reivindicación 6 en el que -la pieza fija (15) comprende n agujeros (20) situados en una circunferencia centrada en el eje de giro con un espaciado angular sustancialmente uniforme, y -la pieza móvil (16) comprende N agujeros (21) situados en una circunferencia centrada en el eje
de giro con un espaciado angular sustancialmente uniforme, siendo el número de agujeros de la pieza fija (15) distinto del de la pieza móvil (16) .
11. Mecanismo de regulación según la reivindicación precedente en el que el número de agujeros de la pieza fija (15, 15’) y de la pieza móvil (16, 16’) difiere en una unidad.
12. Mecanismo de regulación según la reivindicación 6 en el que el medio de fijación es un pasador o un tornillo que se introduce a través del agujero coincidente (14, 14’) .
13. Sistema de transmisión de potencia entre poleas mediante correa que comprende:
- una correa; -un eje motriz (11) que comprende una primera polea; -un eje seguidor (12) que comprende una segunda polea paralelo al eje motriz (11) ; y -un mecanismo de ajuste de la fuerza de pretensión según cualquiera de las reivindicaciones
precedentes.
14. Método para ajustar la fuerza de pretensión de un sistema de transmisión entre poleas mediante correa que comprende los pasos de:
-Proporcionar una correa entre las poleas del eje motriz (11) y eje seguidor (12) en un estado en el que no actúan fuerzas de pretensión.
-Variar la distancia entre el eje motriz (11) y el eje seguidor (12) hasta obtener una fuerza de pretensión deseada mediante un mecanismo de ajuste según cualquiera de las reivindicaciones 1
12. -Fijar la distancia entre el eje motriz (11) y el eje seguidor (12) .
15. Método para ajustar la fuerza de pretensión de un sistema de transmisión entre poleas según la reivindicación precedente en el que la variación de la distancia entre el eje motriz (11) y el eje seguidor (12) 10 está constreñida a un movimiento de rotación del eje motriz (11) alrededor de un tercer eje de giro (17, 17’) , paralelo al eje motriz (11) y al eje seguidor, en el que le eje de giro (17, 17’) no coincide con el eje motriz
(11) o con el eje seguidor (12) .
FIG.1
A C
B D
FIG.2
A B
C D
FIG.4
Patentes similares o relacionadas:
 Dirección asistida eléctrica con accionamiento por correa y tensión de correa sin contacto, del 6 de Noviembre de 2013, de THYSSENKRUPP PRESTA STEERTEC GMBH: Dirección asistida eléctrica para un automóvil con una cremallera montada desplazable axialmente en unacarcasa de dirección y que se puede accionar, […]
Dirección asistida eléctrica con accionamiento por correa y tensión de correa sin contacto, del 6 de Noviembre de 2013, de THYSSENKRUPP PRESTA STEERTEC GMBH: Dirección asistida eléctrica para un automóvil con una cremallera montada desplazable axialmente en unacarcasa de dirección y que se puede accionar, […]
SERVODIRECCION., del 1 de Junio de 2007, de ZF LENKSYSTEME GMBH: Servodirección, especialmente para vehículos automóviles, con una caja de dirección , un motor eléctrico y una biela para desviar ruedas del vehículo, en donde […]
SEGADORA., del 1 de Mayo de 2005, de KUHN S.A.: Dispositivo de tratamiento de forraje cortado que comprende: - un rotor de tratamiento susceptible de girar alrededor de un eje de rotación […]
COMPRESOR DE FLUIDOS IMPULSADOR POR CORREA, CON DISPOSITIVO AUTO-AJUSTABLE PARA TENSAR LA CORREA., del 16 de Noviembre de 2002, de INGERSOLL-RAND EUROPEAN SALES LIMITED: Un compresor de fluidos , que consta de: a) un generador de fuerza motriz que tiene un elemento de salida que suministra una fuerza motriz producida […]
DISPOSITIVO PARA EL TENSADO DE CORREAS MOTRICES EN MAQUINAS GRANULADORAS., del 16 de Junio de 1999, de MABRIK, S.A.: 1. DISPOSITIVO PARA EL TENSADO DE CORREAS MOTRICES EN MAQUINAS GRANULADORAS; SIENDO ACCIONADAS DICHAS POR UN ELEMENTO MOTOR FIJADO SOBRE UNA PLACA DE SOPORTE ASOCIADA […]
DISPOSITIVO PARA EL AJUSTE DE LA TENSION DE UNA CORREA DE ARRASTRE, del 16 de Marzo de 1998, de RENAULT: DISPOSITIVO PARA EL AJUSTE DE LA POSICION DE UN ORGANO , TAL COMO UN ALTERNADOR, QUE ESTA MONTADO ARTICULADO EN UN PUNTO (X-X) SOBRE LA ESTRUCTURA DE UN MOTOR […]
UNIDAD DE ACCIONAMIENTO., del 16 de Enero de 1996, de SCHRODER, KARLHEINZ: EN UNA UNIDAD DE ACCIONAMIENTO, COMPUESTA DE UN EJE DE ACCIONAMIENTO EN EL LADO MOTOR Y ACCIONAMIENTO POR CORREA CON EJE DE TRANSMISION DEBEN SER […]