Maquinaria terapéutica.
Maquinaria terapéutica objeto que utiliza un módulo generador común,
dotado de un freno electromagnético, de un motor opcional y de varios sensores, conectado mecánicamente, mediante cadenas de transmisión, a unos medios de movimiento del usuario, estando regulado desde un módulo electrónico de control dotado de pantalla táctil con una estructura común de soporte desmontable con forma de H, y con un asiento dotado de medios de regulación en altura y los medios de regulación en profundidad del asiento relacionados de forma continua permitiendo de esta forma la regulación simultánea de ambos parámetros.
Sus ventajas incluyen una perfecta adecuación y control de la actividad terapéutica, una adecuación más rápida y precisa a las necesidades y particularidades antropomórficas de cada usuario y una fabricación más económica, disminuyendo notablemente el coste económico de esta maquinaria.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331460.
Solicitante: INTERVAP EUROPA, S.L.U.
Nacionalidad solicitante: España.
Inventor/es: GÓMEZ DOMÍNGUEZ,José Ignacio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63B21/005 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 21/00 Aparatos gimnásticos para desarrollar o fortalecer los músculos o las articulaciones del cuerpo mediante el vencimiento de resistencias, con o sin dispositivos de medida (controles eléctricos o electrónicos correspondientes A63B 24/00). › utilizando dispositivos resistentes electromagnéticos o eléctricos.
- A63B23/035 A63B […] › A63B 23/00 Aparatos de ejercicio especialmente adaptados a partes determinadas del cuerpo (A63B 22/00 tiene prioridad; aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos de los mismos A63B 24/00; dispositivos para ejercitar o fortificar los dedos o los brazos para la enseñanza de la manipulación de teclados G09B, p. ej. G09B 15/06). › para los miembros, es decir superiores o inferiores, p. ej. al mismo tiempo.
Fragmento de la descripción:
Maquinaria terapéutica La presente memoria descriptiva se refiere, como su título indica, a una maquinaria terapéutica, del tipo de la utilizada para la rehabilitación y recuperación de lesiones y otros problemas musculares, neurológicas o de otro tipo, normalmente bajo supervisión de personal especializado, caracterizada por que utiliza un módulo generador común, dotado de un freno electromagnético, de un motor opcional y de varios sensores, conectado mecánicamente, mediante cadenas de transmisión, a unos medios de movimiento del usuario, estando regulado desde un módulo electrónico de control dotado de pantalla táctil con una estructura común de soporte desmontable con forma de H, y con un asiento dotado de medios de regulación en altura y los medios de regulación en profundidad del asiento relacionados de forma continua permitiendo de esta forma la regulación simultánea de ambos parámetros
Campo de la invención La invención se refiere al campo de la maquinaria terapéutica utilizada para la rehabilitación y recuperación de lesiones y otros problemas musculares, neurológicas o de otro tipo, normalmente bajo supervisión de personal especializado.
Estado actual de la técnica En la actualidad, y dentro del ámbito terapéutico y de rehabilitación, son conocidas y utilizadas gran número de maquinas de ejercicios. La mayor parte de ellas son máquinas de gimnasio o de fitness, como por ejemplo las descritas en las patentes JP2004016577 “Indoor exercise machine for fitness”, ES-2361628 “Máquina de gimnasia”, ES 1079198 U “Sofá automático de estiramientos de la extremidades inferiores” y WO2012168500
“Sistema de interpretación dinámica de datos en dos fases para aparatos de gimnasia y fitness”, y por ello presentan el inconveniente de que su operación está orientada al desarrollo muscular en un gimnasio, y no a una terapia de rehabilitación, con lo que su aplicación resulta problemática.
Existen algunos dispositivos más específicamente orientados a la rehabilitación, como por ejemplo los recogidos en las patentes ES-1070517 U “Dispositivo simulador de fuerzas resistentes aplicable a máquinas de musculación para realizar ejercicios físicos”, ES-1073895 “Máquina de entrenamiento personal”, ES-2180582 “Aparato de terapia de estiramiento para el cuidado de la forma física, la rehabilitación y el tratamiento médico” y WO9638206A1 “Aparato gimnástico y de rehabilitación”, pero presentan el problema de la dificultad y falta de control por parte del terapeuta, junto con la dificultad de preparación de programas personalizados para cada usuario, al ser maquinas fundamentalmente mecánicas.
Además todas estas máquinas comparten el problema de su falta de modularidad constructiva, ya que cada máquina es diferente de otras, requiriendo de una fabricación unitaria, casi artesanal, que encarece notablemente los costes económicos de dicha maquinaria.
Descripción de la invención Para solventar la problemática existente en la actualidad en las máquinas para rehabilitación y recuperación de lesiones y otros problemas musculares, neurológicas o de otro tipo se ha ideado la maquinaria terapéutica objeto de la presente invención, la cual utiliza un módulo generador común, dotado de un freno electromagnético, de un motor opcional y de varios sensores, conectado mecánicamente, mediante cadenas de transmisión, a unos medios de movimiento del usuario.
Este módulo generador se regula mediante un interface de control desde un módulo electrónico de control dotado de pantalla táctil, altavoces, y un dispositivo microprocesador con un software específico adecuado a las distintas actividades a realizar.
La maquinaria esta soportada mediante una estructura común desmontable con forma de H, y está dotada en muchas de sus realizaciones de un asiento dotado de medios de regulación en altura, medios de regulación en profundidad, medios de regulación de ángulo de giro y medios de regulación de inclinación del respaldo, todos ellos con bloqueo de posición, así como de reposabrazos abatibles y arneses o cinturones de fijación del usuario al asiento. Los medios de regulación en altura y los medios de regulación en profundidad del asiento están preferentemente relacionados de forma continua permitiendo de esta forma la regulación simultánea de ambos parámetros.
ES 2 435 803 Al
Los medios de movimiento del usuario pueden adoptar diversas estructuras, dependiendo del tipo de tratamiento terapéutico que se desee realizar, dando lugar a diversas realizaciones de la invención.
Ventajas de la invención Esta maquinaria terapéutica que se presenta aporta múltiples ventajas sobre los dispositivos disponibles en la actualidad siendo la más importante que la utilización de un módulo generador combinado con un sistema microprocesador de control permite una perfecta adecuación y control de la actividad terapéutica.
Otra importante ventaja es que la utilización de módulos comunes en todas las máquinas, como el módulo generador, el módulo de control o la estructura de soporte, permite una fabricación más económica, disminuyendo notablemente el coste económico de esta maquinaria.
Otra ventaja de la presente invención es la inclusión de asientos con regulación combinada de la altura y profundidad, que permite una adecuación más rápida y precisa a las necesidades y particularidades antropomórficas de cada usuario.
Otra de las más importantes ventajas a destacar es que el módulo generador permite, además del control de la fuerza realizada por el usuario mediante el freno electromagnético, la adición de un motor que fuerza un poco el movimiento, proporcionando una ayuda asistida que facilita la recuperación en casos más graves.
Asimismo otra ventaja añadida es que esta invención permite disponer de una serie de máquinas terapéuticas perfectamente adaptadas a la rehabilitación y recuperación de lesiones y otros problemas musculares, neurológicas o de otro tipo, preferentemente bajo supervisión de personal especializado que ajuste y personalice los parámetros de control y de operación, adecuándolos perfectamente a las necesidades particulares de cada usuario, consiguiendo con ello mejorar y acelerar el proceso de rehabilitación.
Descripción de las figuras Para comprender mejor el objeto de la presente invención, en el plano anexo se han representado unas realizaciones prácticas de la maquinaria terapéutica. En dicho plano la figura –1- muestra un diagrama de bloques simplificado de sus elementos principales.
La figura –2- muestra dos vistas en perspectiva con diferente ángulo del módulo generador.
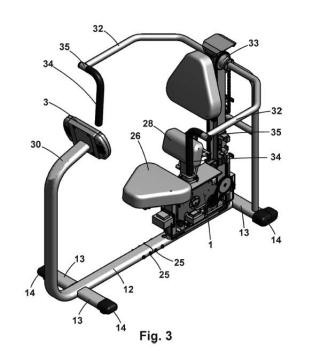
La figura -3- muestra una vista en perspectiva de la realización A, sin las envolventes que protegen al módulo generador, para poder apreciarlo.
La figura -4- muestra una vista en alzado de la realización A.
La figura -5- muestra una vista en planta de la realización A.
La figura -6- muestra una vista en perspectiva de la realización B, sin las envolventes que protegen al módulo
generador, para poder apreciarlo.
La figura -7- muestra una vista en alzado de la realización B.
La figura -8- muestra una vista en planta de la realización B.
La figura -9- muestra una vista en perspectiva de la realización C, sin las envolventes que protegen al módulo
generador, para poder apreciarlo.
La figura -10- muestra una vista en alzado de la realización C.
La figura -11- muestra una vista en planta de la realización C.
La figura -12- muestra una vista en perspectiva de la realización D, sin las envolventes que protegen al módulo
generador, para poder apreciarlo.
La figura -13- muestra una vista en alzado de la realización D.
La figura -14- muestra una vista en planta de la realización D.
ES 2 435 803 Al
La figura -15- muestra una vista en perspectiva de la realización E, sin las envolventes que protegen al módulo generador, para poder apreciarlo.
La figura -16- muestra una vista en alzado de la realización E.
La figura -17- muestra una vista en perfil de la realización E.
La figura -18- muestra una vista en planta de la realización E
La figura -19- muestra una vista en perspectiva de la realización F, sin las envolventes que protegen al módulo generador, para poder apreciarlo.
La figura -20- muestra una vista en alzado de la realización F.
La figura -21- muestra una vista en planta de la realización F.
La figura -22- muestra una vista en perspectiva de la realización G, sin las envolventes que protegen al módulo generador,...
Reivindicaciones:
– Maquinaria terapéutica, del tipo de la utilizada para la rehabilitación y recuperación de lesiones y otros problemas musculares, neurológicas o de otro tipo caracterizada por que comprende
- un módulo generador (1) comprendiendo un freno electromagnético y una pluralidad de sensores, conectado mecánicamente, mediante una cadena de transmisión, a unos medios de movimiento del usuario,
- un módulo electrónico de control (3) , comprendiendo una pantalla informativa (4) de tipo táctil, uno o varios altavoces (5) , un dispositivo microprocesador (6) dotado con un software específico (7) , uno o varios módulos de comunicaciones digitales (8) y uno o varios conectores (9) para unidades de memoria personal externa,
- una módulo de alimentación (10) a partir de la red eléctrica,
- un interface de control (11) para el módulo generador (1) ,
- una estructura de soporte adoptando una planta en H, conformada con al menos un larguero central
(12) hueco, horizontalmente dispuesto, terminado en cada uno de sus extremos por uno o dos travesaños (13) , perpendiculares al larguero central (12) , también horizontalmente dispuestos y de menor longitud que este, terminados en su extremo exterior por una terminación semielástica (14) de contacto con el suelo.
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que el módulo generador (1) comprende un freno electromagnético conformado por un disco metálico (15) dotado de giro entre al menos dos electroimanes (16) , y conectado mecánicamente mediante una correa de transmisión (17) , regulada mediante un tensor (18) , a una polea (19) , que a su vez es solidaria mediante un eje, con una polea dentada (20) que está conectada a su vez mediante una cadena de transmisión (21) , a los medios de movimiento del usuario, estando soportados estos elementos mediante dos chasis (22) , con un ala plegada inferior en sentido opuesto para cada chasis, relacionados entre sí mediante una pluralidad de separadores (23) periféricamente dispuestos y conteniendo el disco metálico (15) entre los dos chasis (22) , y estando cubierto todo el conjunto del módulo generador (1) mediante una o varias envolventes (24 )
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que el módulo generador (1) comprende un motor eléctrico (2) relacionado mecánicamente con la polea dentada (20) .
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que los sensores del módulo generador
(1) son elegidos del grupo formado por sensores de posición, sensores de velocidad, sensores de giro, sensores de fuerza y sensores de aceleración.
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que los módulos de comunicaciones digitales (8) pueden ser de tipo inalámbrico, cableado, o una combinación de ambos.
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que el larguero central (12) hueco de la estructura de soporte comprende varias partes unidas entre sí, de forma desmontable, mediante medios mecánicos de fijación (25) convencionales.
– Maquinaria terapéutica, según cualquiera de las reivindicaciones anteriores, caracterizada por que comprende un asiento (26) dotado de medios de regulación en altura, medios de regulación en profundidad, medios de regulación de ángulo de giro y medios de regulación de inclinación del respaldo (28) , todos ellos con bloqueo de posición, así como de reposabrazos abatibles (29) y medios de fijación del usuario al asiento (26) .
– Maquinaria terapéutica, según la reivindicación 7, caracterizada por que los medios de fijación del usuario al asiento (26) son elegidos del grupo formado por cinturón de dos puntos, cinturón de tres puntos y arnés.
– Maquinaria terapéutica, según cualquiera de las reivindicaciones 7 y 8, caracterizada por que los medios de regulación en altura y los medios de regulación en profundidad del asiento (26) están relacionados de forma continua mediante una pletina inclinada (27) sobre la que se desliza el asiento (26) , correspondiendo la posición de mayor altura con la de menor profundidad, y la de menor altura con la de mayor profundidad.
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que el módulo electrónico de control
(3) se encuentra ubicado en el extremo de una prolongación (30) del larguero central (12) hueco, que emerge
ES 2 435 803 Al
verticalmente mediante un tramo curvo, para terminar mediante otro tramo curvo en un extremo inclinado que soporta el módulo electrónico de control (3) .
– Maquinaria terapéutica, según la reivindicación 1, caracterizada por que los medios de movimiento del usuario se encuentran relacionados con la polea dentada (20) del módulo generador (1) por medio de una o varias poleas dentadas (31) y una o varias cadenas de transmisión (21) .
– Maquinaria terapéutica, según la reivindicación 11, caracterizada por que los medios de movimiento del usuario adoptan una estructura seleccionada del grupo:
- dos brazos (32) horizontalmente dispuestos, relacionados con el módulo generador (1) por un extremo a través de unos medios de giro (33) lateralmente dispuestos ubicados detrás del asiento (26) , y dotados en su otro extremo de unos posamanos (34) , dotados asimismo de medios de giro
(35) con respecto a los brazos (32) , siendo susceptibles de ser accionados estos brazos (32) con las extremidades superiores del usuario,
- dos brazos (36) ubicados en la parte delantera, de forma inclinada pero mayormente vertical, a ambos lados del módulo electrónico de control (3) , enfrente del asiento (26) , relacionados con el módulo generador (1) por un extremo a través de unos medios de giro (37) lateralmente dispuestos ubicados en la parte inferior delantera, y dotados en su parte inferior de reposapiés (38) , y en su parte superior de unos posamanos inclinados (39a) y otros posamanos horizontales (39b) , dispuestos ambos hacia el interior, siendo susceptibles de ser accionados estos brazos (36) con las extremidades superiores e inferiores del usuario,
- dos brazos (40) ubicados en la parte delantera, a ambos lados del módulo electrónico de control (3) , enfrente del asiento (26) y a media altura, relacionados con el módulo generador (1) por el extremo interior a través de unos medios de giro (41) lateralmente dispuestos y dotados en el extremo exterior de un posapies (42) emergente lateralmente, y de unas almohadillas de apoyo (43) también emergentes lateralmente pero situadas a un nivel inferior al del brazo (40) , siendo susceptibles de ser accionados estos brazos (40) con las extremidades inferiores del usuario,
- dos brazos (44) ubicados en la parte delantera, a ambos lados del módulo electrónico de control (3) , enfrente del asiento (26) y a media altura, relacionados con el módulo generador (1) por el extremo interior a través de unos medios de giro (45) lateralmente dispuestos y dotados en el extremo exterior de un pedal (46) emergente lateralmente, dotado de una brida (47) de sujeccion superior para el pié, siendo susceptibles de ser accionados estos brazos (44) con las extremidades inferiores del usuario, y
- dos brazos (48) conformados con un tramo inclinado y terminando con un tramo mayoritario vertical, ubicados en la parte delantera entre el módulo electrónico de control (3) y el asiento (26) , relacionados con el módulo generador (1) por el extremo inferior a través de unos medios de giro
(49) dispuestos ubicados en la parte inferior interior, y dotados en su parte inferior de reposapiés
(50) y en su parte superior de unas almohadillas de apoyo (51) verticalmente dispuestas, y de unas prolongaciones inclinadas (52) emergiendo lateralmente y dotadas asimismo de unas almohadillas de apoyo (53) , siendo susceptibles de ser accionados estos brazos (48) con las extremidades superiores del usuario.
– Maquinaria terapéutica, según la reivindicación 12, caracterizada por que los dos brazos (32, 36, 40, 44, 48) comprendidos en los medios de movimiento del usuario, están dotados de movimiento independiente entre sí, transmitido al módulo generador (1) mediante la combinación de poleas dentadas (31) y cadenas de transmisión (21) .
– Maquinaria terapéutica, según la reivindicación 12, caracterizada por que los dos brazos (32, 36, 40, 44, 48) comprendidos en los medios de movimiento del usuario, están dotados de movimiento opuesto e interrelacionado entre sí, transmitiéndose la fuerza realizada en cada uno de los brazos al otro en forma de movimiento de sentido opuesto, mediante la combinación de poleas dentadas (31) y cadenas de transmisión (21) que los relacionan mecánicamente con la polea dentada (20) del módulo generador (1) .
– Maquinaria terapéutica, según la reivindicación 11, caracterizada por que los medios de movimiento del usuario adoptan una estructura seleccionada del grupo:
- un asiento formado por una base horizontal (54) fija, y un respaldo (55) con capacidad de giro, dotado de almohadilla de apoyo lumbar (56) , unos apoyabrazos (57) lateralmente dispuestos y unos posamanos (58) , relacionado con el módulo generador (1) a través de unos medios de giro (59) lateralmente dispuestos en su parte inferior, siendo complementado por un reposapiés fijo (60) ,
ES 2 435 803 Al
siendo susceptible de ser accionado este respaldo (55) con acción combinada de las extremidades inferiores y el tronco del usuario,
- un único brazo (61) de forma vertical terminado en un tramo de posamanos (62) horizontalmente dispuesto, ubicado en la parte delantera en el lateral del módulo electrónico de control (3) , enfrente del asiento (26) , relacionados con el módulo generador (1) por el extremo inferior a través de un medio de giro (63) , siendo susceptible de ser accionado este brazo (61) con las extremidades superiores del usuario de forma simultánea, y
- un asiento formado por una base horizontal (64) solidaria con un respaldo (65) , unos refuerzos laterales (66) y unos posamanos (67) en los laterales por su parte exterior, relacionado con el módulo generador (1) ubicado debajo a través de uno medio de giro pivotante multieje (68) dispuestos en su parte inferior, siendo complementado por una estructura de apoyo conformada por un almohadillado frontal (69) , unos almohadillados laterales (70) , y uno doble apoyamanos (71) con forma de U, siendo susceptible de ser accionado este asiento con la acción combinada de las extremidades inferiores y el tronco del usuario.
– Procedimiento de operación de una maquinaria terapéutica como la descrita en las anteriores reivindicaciones, caracterizado por que comprende una fase de selección de parámetros de tratamiento, una fase de control de la actividad, una fase de indicación de actividad, y una fase de almacenamiento de resultados.
– Procedimiento de operación según la reivindicación 16, caracterizado por que la fase de selección de parámetros de tratamiento comprende la introducción de los distintos parámetros personalizados del tratamiento del usuario, tales como procedimiento, fuerza, tiempo a utilizar, número de repeticiones, ritmo, etc… bien mediante la pantalla táctil de la pantalla informativa (4) , bien mediante una unidad de memoria personal externa a través del conector (9) , o bien mediante un módulo de comunicaciones digitales (8) desde un servidor informático externo.
– Procedimiento de operación según la reivindicación 16, caracterizado por que la fase de control de la actividad comprende el seguimiento por parte del módulo electrónico de control (3) de los distintos parámetros de la actividad, incluyendo el control en tiempo real de los sensores del módulo generador (1) , monitorizando el ritmo, frecuencia y fuerza aplicada en los medios de movimiento del usuario, y regulando la fuerza aplicada al
freno electromagnético a través del interface de control (11) .
– Procedimiento de operación según la reivindicación 16, caracterizado por que la fase de control de la actividad comprende el seguimiento por parte del módulo electrónico de control (3) de los distintos parámetros de la actividad, incluyendo el control en tiempo real de los sensores del módulo generador (1) , monitorizando el ritmo, frecuencia y fuerza aplicada en los medios de movimiento del usuario, y regulando la fuerza aplicada al freno electromagnético y el movimiento de apoyo generada por el motor eléctrico (2) , a través del interface de control (11) .
– Procedimiento de operación según la reivindicación 16, caracterizado por que la fase de indicación de actividad comprende la presentación visual en la pantalla informativa (4) , de forma acústica a través de los altavoces (5) , o ambas a la vez, de los resultados de la actividad, indicando en tiempo real si los parámetros de la actividad se ajustan a lo establecido, y transmitiendo estos resultados simultáneamente mediante un módulo de comunicaciones digitales (8) hacia un servidor informático externo.
– Procedimiento de operación según la reivindicación 16, caracterizado por que la fase de almacenamiento de resultados comprende la salvaguarda de los resultados de la sesión de actividad, en forma de parámetros realizados bien en la unidad de memoria personal externa a través del conector (9) , bien mediante el módulo de comunicaciones digitales (8) en un servidor informático externo, o bien en ambas ubicaciones.
Patentes similares o relacionadas:
Máquina de ejercicios físicos, del 12 de Junio de 2020, de FRACAROLI JUAREZ, Gabriel Orlando: 1. Máquina de ejercicios físicos, en particular previsto para ejercitar el movimiento de brazos y piernas de un usuario, caracterizada por […]
Dispositivo de ejercicio de remo y método de usarlo, del 18 de Marzo de 2020, de Total Gym Global Corp: Un dispositivo de ejercicio de remo , incluyendo: una estructura de soporte ; un soporte móvil de usuario asociado de forma […]
MÁQUINA DE EJERCICIOS FÍSICOS, del 12 de Marzo de 2020, de FRACAROLI JUAREZ, Gabriel Orlando: La presente invención proporciona una máquina de ejercicios físicos, prevista para ejercitar el movimiento de brazos y piernas de un usuario, que se caracteriza por el hecho […]
Máquina de ejercicios físicos, del 3 de Marzo de 2020, de FRACAROLI JUAREZ, Gabriel Orlando: La presente invención proporciona una máquina de ejercicios físicos, prevista para ejercitar el movimiento de brazos y piernas de un usuario, que se caracteriza por […]
Banco convertible y soporte estabilizador vertical, del 19 de Febrero de 2020, de Hoist Fitness Systems, Inc: Una máquina de ejercicio para realizar rutinas de ejercicio en diferentes posiciones, que comprende: un conjunto de brazo ; y una estación de […]
Dispositivo terapéutico para rodilla postoperatoria, del 8 de Enero de 2020, de Ewing, Paul: Un dispositivo de ejercicio para ejercitar una articulación y una extremidad que comprende: un miembro de accionamiento giratorio alrededor de un […]
Aparato portátil de uso deportivo para el desarrollo muscular, del 13 de Diciembre de 2019, de SIMES MENDEZ, Elias: 1. Aparato portátil de uso deportivo para el desarrollo muscular que comprende un dispositivo portátil de materiales rígidos o semirrígidos, […]
Máquina de ejercicios de flexión de piernas que incluye un soporte móvil para realizar ejercicios de flexión de piernas boca abajo, del 27 de Noviembre de 2019, de Hoist Fitness Systems, Inc: Una máquina de ejercicios para realizar ejercicios de flexión de piernas boca abajo, que comprende: un armazón principal estacionario; […]