Instrumento quirúrgico con mecanismo de articulación.
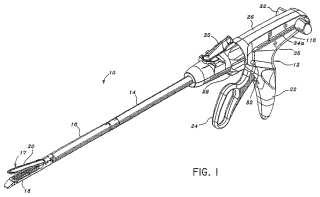
Un instrumento quirúrgico (10) que comprende:
(a) un montaje de 5 empuñadura (12),
(b) un cuerpo (14) que se extiende distalmente desde el montaje de empuñadura (12), definiendo el cuerpo (14) unprimer eje geométrico longitudinal,
(c) un montaje de herramienta (17) soportado de forma basculante sobre un extremo distal del cuerpo (14),definiendo el montaje de herramienta (17) un segundo eje geométrico longitudinal, siendo el montaje de herramienta(17) basculable desde una posición no articulada en la que el primer eje geométrico longitudinal está alineado con elsegundo eje geométrico longitudinal y al menos una posición articulada en la que el segundo eje geométricolongitudinal está en ángulo con respecto al primer eje geométrico longitudinal, y
(d) un mecanismo de articulación (420) que incluye:
un receptáculo (436) situado en posición adyacente al montaje de empuñadura (12),
un eje principal (432) que tiene una porción de base, estando el eje principal (432) soportado de forma rotatoriadentro del receptáculo (436),
un tirante de articulación (123) que tiene un extremo proximal conectado de forma operativa a la porción de base deleje principal (432) y un extremo distal conectado de forma operativa al montaje de herramienta (17);
en el que el eje principal (432) es rotatorio para desplazar el tirante de articulación (123) para efectuar eldesplazamiento del montaje de herramienta (17) entre la posición no articulada y la al menos una posiciónarticulada;
caracterizado porque el mecanismo de articulación incluye también:
un embrague inferior (430) situado de manera fija dentro del receptáculo (436), teniendo el embrague inferior (430)una porción dentada (444) y estando situado alrededor del eje principal (432), incluyendo la porción dentada (444)una serie de indentaciones poco profundas (448) y al menos una indentación profunda (450); y
un embrague superior (428) situado de manera deslizable alrededor del eje principal (432), estando el embraguesuperior (428) fijado de manera rotatoria al eje principal (432) de manera que la rotación del eje principal (432)determina la rotación del embrague superior (428), incluyendo el embrague superior (428) al menos una proyección(470) situada para aplicarse a y desaplicarse de las indentaciones (448, 450) del embrague inferior (430) pararetener de manera liberable el eje principal (432) en una posición fijada de forma rotatoria.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08252877.
Solicitante: Covidien LP .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 15 HAMPSHIRE STREET MANSFIELD, MA 02048 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MAFFEI, FRANK C., MARCZYK,STANISLAW, CAPPOLA,KENNETH M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/068 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Grapadoras quirúrgicas (para realizar anastomosis A61B 17/115).
PDF original: ES-2441547_T3.pdf
Fragmento de la descripción:
Instrumento quirúrgico con mecanismo de articulación
Antecedentes
1. Campo técnico
Esta solicitud se refiere a un aparato quirúrgico y, más concretamente, a un mecanismo articulado para su uso con un aparato quirúrgico endoscópico de grapado para la aplicación de forma secuencial de una pluralidad de medios de sujeción quirúrgicos en un tejido del cuerpo y para la incisión de manera opcional del tejido sujeto.
2. Antecedentes de la técnica relacionada
Se conocen sobradamente en la técnica dispositivos quirúrgicos en los que el tejido se agarra primeramente y se sujeta entre una estructura de mordazas opuestas y a continuación se une mediante unos medios de sujeción quirúrgicos. En algunos instrumentos se dispone un bisturí para cortar el tejido que se ha unido por los medios de sujeción. Los medios de sujeción consisten típicamente en unas grapas quirúrgicas pero también pueden utilizarse unos medios de sujeción poliméricos de dos piezas.
Los instrumentos con la finalidad indicada pueden incluir dos miembros alargados que se utilizan respectivamente para capturar o sujetar el tejido. Típicamente, uno de los miembros incorpora un cartucho de grapas que aloja una pluralidad de grapas dispuestas en al menos dos filas laterales mientras que el otro miembro incorpora un yunque que define una superficie para la formación de los pies de las grapas cuando las grapas son introducidas a partir del
cartucho de grapas. En general, la operación de grapado se efectúa mediante unas barras de leva que se desplazan longitudinalmente a través del cartucho de grapas, actuando las barras de leva sobre unos empujadores de las grapas para expulsar de forma secuencial las grapas del cartucho de grapas. Un bisturí puede desplazarse entre las filas de grapas para cortar longitudinalmente y/o abrir el tejido grapado entre las filas de grapas. Dichos instrumentos se divulgan, por ejemplo, en la patente de EE.UU. nº 3.079.606 y en la patente de EE.UU. nº 3.490.675.
Una grapadora posterior divulgada en la patente de EE.UU. nº 3.499.591 aplica una doble fila de grapas a cada lado de la incisión. Esto se lleva a cabo disponiendo una unidad de carga desechable en la que un miembro de leva se desplaza a través de una trayectoria de guía alargada entre dos conjuntos de surcos que incorporan grapas al tresbolillo. Los miembros de accionamiento de las grapas están situados dentro de los surcos y se sitúan de tal
manera que entran en contacto con el miembro de leva de desplazamiento longitudinal para llevar a cabo la eyección de las grapas del cartucho de grapas de la unidad de carga desechable. Otros ejemplos de dichas grapadoras se divulgan en las patentes de EE.UU. nº 4.429.695 y nº 5.065.929.
Cada uno de los instrumentos descritos con anterioridad fue diseñado para su uso en intervenciones quirúrgicas convencionales en las que los cirujanos tienen acceso manual directo a la zona operativa. Sin embargo, en procedimientos quirúrgicos endoscópicos o laparoscópicos, la intervención quirúrgica se lleva a cabo mediante la práctica de una pequeña incisión o a través de una cánula estrecha insertada a través de unas pequeñas heridas de entrada en la piel. Con el fin de dar respuesta a las necesidades específicas de los procedimientos quirúrgicos endoscópicos y/o laparoscópicos, se han desarrollado unos dispositivos de grapado quirúrgicos endoscópìcos y se 45 divulgan en, por ejemplo, las patentes de EE.UU. nº 5.040.715 (Green y cols.) ; nº 5.307.976 (Olson y cols.) ; nº
5.312.023 (Green y cols.) ; nº 5.318.221 (Green y cols.) ; nº 5.326.013 (Green y cols.) ; y nº 5.332.142 (Robinson y cols.) . El documento US 5.865.361 divulga otro ejemplo de un dispositivo de grapado quirúrgico de aplicación especial para intervenciones quirúrgicas endoscópicas. El dispositivo puede utilizarse tanto con unidades de carga desechables tanto articuladas como no articuladas.
El documento EP 0807409 divulga un instrumento quirúrgico articulado de acuerdo con el preámbulo de la reivindicación 1 y con unos embragues inferior y superior dentados.
La “US Surgical” estadounidense ha fabricado y comercializado instrumentos de grapado endoscópicos, como por
ejemplo el instrumento Multifire ENDO GIA* 30, durante varios años. Estos instrumentos han proporcionado ventajas clínicas considerables. No obstante, existe la posibilidad de mejoras, por ejemplo, reduciendo el coste y la complejidad de fabricación.
Los actuales dispositivos de grapado lineales laparoscópicos están configurados para operar con unas unidades de carga desechables y/o unos cartuchos de grapas de un solo tamaño. Por ejemplo, las grapadoras lineales individuales en la actualidad se encuentran disponibles para aplicar unas filas paralelas de grapas que miden 30 mm, 45 mm y 60 mm de longitud. Así, en el desarrollo de una operación normal, un cirujano puede requerir la utilización de diversos instrumentos de grapado diferentes para llevar a cabo una única intervención quirúrgica laparoscópica. Dichas prácticas incrementan el tiempo, la complejidad y los costes globales asociados con las 65 intervenciones quirúrgicas laparoscópicas. Asimismo, los costes son mayores para diseñar y fabricar múltiples tamaños de grapadoras frente a lo que ocurre en la creación de una única grapadora multiusos.
Para efectuar mejoras o modificaciones en los instrumentos actuales, sería muy conveniente no prescindir de ninguna de las considerables ventajas del instrumento MULTIFIRE ENDO GIA* 30 en comparación con otros productos comercialmente disponibles. Es deseable que el efector terminal sea capaz de articularse con respecto al
eje alargado del instrumento.
Sumario La presente invención proporciona un instrumento quirúrgico (10) que comprende:
(a) un montaje de empuñadura (12) ,
(b) un cuerpo (14) que se extiende distalmente desde el montaje de empuñadura (12) , definiendo el cuerpo (14) un
primer eje geométrico longitudinal, 15
(c) un montaje de herramienta (17) soportado mediante pivote sobre un extremo distal del cuerpo (14) , definiendo el montaje de herramienta (17) un segundo eje geométrico longitudinal, siendo el montaje de herramienta (17) susceptible de basculación desde una posición no articulada en la que el primer eje geométrico longitudinal está alineado con el segundo eje geométrico longitudinal y al menos una posición articulada en la que el segundo eje geométrico longitudinal está en ángulo con respecto al primer eje geométrico longitudinal, y
(d) un mecanismo de articulación (420) que incluye:
- un receptáculo (436) situado en posición adyacente al montaje de empuñadura (12) , 25
- un eje principal (432) que presenta una porción de base, soportándose el eje principal (432) de forma rotatoria dentro del receptáculo (436) ,
- un tirante de articulación (123) que presenta un extremo proximal conectado de forma operativa con la porción de base del eje principal (432) y un extremo distal conectado de forma operativa con el montaje de herramienta (17) ;
en el que el eje principal (432) puede rotar para desplazar el tirante de articulación (123) para llevar a cabo el desplazamiento del montaje de herramienta (17) entre la posición no articulada y la al menos una posición articulada;
caracterizado porque el mecanismo de articulación incluye también:
un embrague inferior (430) situado de manera fija dentro del receptáculo (436) , presentando el embrague inferior
(430) una porción dentada (444) y que está situada alrededor del eje principal (432) , incluyendo la porción dentada (444) una serie de indentaciones de escasa profundidad (448) y al menos una indentación profunda (450) , y
un embrague superior (428) situado de manera deslizable alrededor del eje principal (432) , estando el embrague superior (428) fijado de forma rotatoria al eje principal (432) de manera que la rotación del eje principal (432) lleva a cabo la rotación del embrague superior (428) , incluyendo el embrague superior (428) al menos una proyección (470)
situada para enganchar y desenganchar las indentaciones (448, 450) del embrague inferior (430) para retener de manera liberable el eje principal (432) en una posición fija de forma rotatoria.
De acuerdo con la presente divulgación se proporciona un mecanismo de articulación, no de acuerdo con la presente invención, que incluye una carcasa que delimita un receptáculo. El receptáculo incluye un taladro pasante. Un eje principal se soporta de forma rotatoria dentro del receptáculo e incluye una porción de cuerpo cilíndrica. La porción de base presenta una superficie... [Seguir leyendo]
Reivindicaciones:
1. Un instrumento quirúrgico (10) que comprende:
(a) un montaje de empuñadura (12) ,
(b) un cuerpo (14) que se extiende distalmente desde el montaje de empuñadura (12) , definiendo el cuerpo (14) un primer eje geométrico longitudinal,
(c) un montaje de herramienta (17) soportado de forma basculante sobre un extremo distal del cuerpo (14) , definiendo el montaje de herramienta (17) un segundo eje geométrico longitudinal, siendo el montaje de herramienta (17) basculable desde una posición no articulada en la que el primer eje geométrico longitudinal está alineado con el segundo eje geométrico longitudinal y al menos una posición articulada en la que el segundo eje geométrico longitudinal está en ángulo con respecto al primer eje geométrico longitudinal, y
(d) un mecanismo de articulación (420) que incluye:
un receptáculo (436) situado en posición adyacente al montaje de empuñadura (12) ,
un eje principal (432) que tiene una porción de base, estando el eje principal (432) soportado de forma rotatoria dentro del receptáculo (436) ,
un tirante de articulación (123) que tiene un extremo proximal conectado de forma operativa a la porción de base del eje principal (432) y un extremo distal conectado de forma operativa al montaje de herramienta (17) ;
en el que el eje principal (432) es rotatorio para desplazar el tirante de articulación (123) para efectuar el desplazamiento del montaje de herramienta (17) entre la posición no articulada y la al menos una posición articulada;
caracterizado porque el mecanismo de articulación incluye también:
un embrague inferior (430) situado de manera fija dentro del receptáculo (436) , teniendo el embrague inferior (430) una porción dentada (444) y estando situado alrededor del eje principal (432) , incluyendo la porción dentada (444) una serie de indentaciones poco profundas (448) y al menos una indentación profunda (450) ; y
un embrague superior (428) situado de manera deslizable alrededor del eje principal (432) , estando el embrague superior (428) fijado de manera rotatoria al eje principal (432) de manera que la rotación del eje principal (432) determina la rotación del embrague superior (428) , incluyendo el embrague superior (428) al menos una proyección (470) situada para aplicarse a y desaplicarse de las indentaciones (448, 450) del embrague inferior (430) para 40 retener de manera liberable el eje principal (432) en una posición fijada de forma rotatoria.
2. El instrumento quirúrgico (10) de acuerdo con la reivindicación 1, en el que el mecanismo de articulación (420) incluye también un miembro de traslación (434) sustancialmente rígido que interconecta el eje principal (432) y el tirante de articulación (123) .
4.
3. El instrumento quirúrgico (10) de acuerdo con la reivindicación 2, en el que la porción de base del eje principal
(432) incluye un miembro de leva (480) y el miembro de traslación (123) incluye una ranura de leva (498) configurada para recibir el miembro de leva (480) de manera que la rotación de la porción de base del eje principal
(432) determina el desplazamiento axial del miembro de traslación (434) .
5.
4. El instrumento quirúrgico (10) de acuerdo con las reivindicaciones 1, 2 o 3, en el que el mecanismo de articulación (420) incluye también un miembro (426) presionante situado para forzar el embrague superior (428) dentro del embrague inferior (430) .
5. El instrumento quirúrgico (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que el embrague superior (428) incluye una pluralidad de proyecciones (470) .
6. El instrumento quirúrgico (10) de acuerdo con la reivindicación 5, en el que cada una de la pluralidad de proyecciones (470) presenta una proyección transversal de forma triangular y cada una de la pluralidad de 60 indentaciones (448, 450) está definida por unas paredes anguladas.
7. El instrumento quirúrgico (10) de acuerdo con la reivindicación 6, en el que la pluralidad de proyecciones (470) están dimensionadas de tal manera que un vértice de cada proyección (470) está recibido dentro de las indentaciones poco profundas (448) y sustancialmente toda la proyección (470) está recibida dentro de las 65 indentaciones profundas (450) .
8. El instrumento quirúrgico (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que el mecanismo de articulación (420) incluye también una palanca de articulación (422) unida de manera fija al eje principal (432) y situada por fuera del receptáculo (436) .
9. El instrumento quirúrgico (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, que incluye también un miembro rotatorio (438) soportado de manera rotatoria en posición adyacente al montaje de empuñadura (12) , estando el extremo proximal del cuerpo (14) soportado por el miembro rotatorio (438) de manera que la rotación del miembro rotatorio (438) determina la rotación del cuerpo (14) alrededor del primer cuerpo geométrico longitudinal.
1.
10. El instrumento quirúrgico (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que el cuerpo (14) es alargado.
11. El instrumento quirúrgico (10) de acuerdo con la reivindicación 9, en el que el receptáculo (436) está 15 conformado en el miembro rotatorio (438) .
12. El instrumento quirúrgico (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que la al menos una proyección (470) está posicionada para estar recibida dentro de la al menos una indentación profunda (450) cuando el montaje de herramienta (17) está en la posición no articulada.
2.
13. El instrumento quirúrgico (10) de acuerdo con la reivindicación 12, en el que el embrague inferior (430) incluye tres indentaciones profundas (450) y el embrague superior incluye tres proyecciones (470) .
14. El instrumento quirúrgico (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que el 25 montaje de herramienta (17) incluye un montaje de yunque y un cartucho de grapas.
Patentes similares o relacionadas:
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Mecanismo de suministro y bloqueo de elemento de fijación quirúrgico, del 1 de Julio de 2020, de Via Surgical Ltd: Un dispositivo para suministrar una pluralidad de elementos de fijación quirúrgicos , uno a la vez, en el tejido de un paciente, comprendiendo el dispositivo: […]
Instrumentos quirúrgicos articulados, del 10 de Junio de 2020, de C.R. BARD, INC.: Un instrumento quirúrgico que comprende: un mango ; y un conjunto de eje alargado que se extiende distalmente desde el mango , […]
Grapadora circular y componente de grapa de la misma, del 3 de Junio de 2020, de Touchstone International Medical Science Co., Ltd: Un conjunto de cabezal de grapas que comprende: un cartucho anular de grapas que comprende una pluralidad de agujeros de grapas en una cara de extremo del […]
Dispositivo de grapado quirúrgico con deflexión controlada de la viga, del 15 de Abril de 2020, de Covidien LP (100.0%): Un dispositivo de grapado quirúrgico , que comprende: una sección media de yunque que define un eje longitudinal y una superficie de contacto con el tejido […]
Injerto de endoprótesis con elementos de fijación y sistema de introducción, del 1 de Abril de 2020, de JOTEC GMBH: Injerto de endoprótesis para la introducción en un vaso sanguíneo de un paciente, con un cuerpo cilíndrico hueco con un lado de […]
Procedimiento y sistema para proporcionar recomendaciones para la ejecución óptima de procedimientos quirúrgicos, del 25 de Marzo de 2020, de CHILDREN'S NATIONAL MEDICAL CENTER: Un procedimiento para proporcionar información para un procedimiento médico quirúrgico, comprendiendo el procedimiento: adquirir, usando circuitería, […]
Instrumento quirúrgico con unidad de carga reemplazable, del 11 de Diciembre de 2019, de Covidien LP (100.0%): Un instrumento quirúrgico , que comprende: un alojamiento alargado que tiene un extremo proximal y un extremo distal; una […]