Dispositivo de guiado y sujeción para cirugía de mínima incisión del pie o mano.
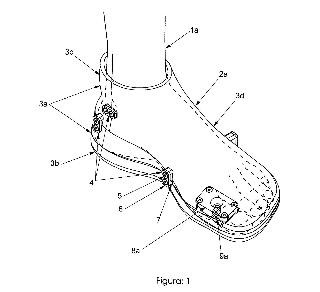
Dispositivo para cirugía de mínima incisión del pie o mano, con envolvente (2a) que sujeta el pie o mano en una posición y orientación concreta para su cirugía.
Que incluye guías (8) intercambiables para que el instrumental quirúrgico tenga limitada su zona de actuación (9a) predefinida. La envolvente puede ser estándar (2f) o a medida (2f) (2g) (2h), con drenaje (23), con piezas (34) que ayuden a la cirugía, con piezas (36) que ayuden al soldado de los huesos, con piezas de fijado (38) a la mesa, con suela (40) y con una interface de ajuste (44) en posición y orientación de la pieza guía. Para facilitar el acto quirúrgico, puede incluir sensores-emisores-marcadores y receptores, con los que se obtienen datos técnicos que son procesados por un ordenador (52a) (52b) ofreciendo información al cirujano en pantalla (53a) (53b) y simulaciones (54) de realidad virtual o aumentada.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201245.
Solicitante: FERRER TORREGROSA, Javier.
Nacionalidad solicitante: España.
Inventor/es: FERRER TORREGROSA,Javier, GARCÍA VICENTE,Sergio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/34 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Trócares; Agujas de punción.
- A61B19/00
- A61G13/12 A61 […] › A61G MEDIOS DE TRANSPORTE, MEDIOS DE TRANSPORTE PERSONALES O DISPOSICIONES ESPECIALMENTE ADAPTADAS PARA ENFERMOS O PARA INVALIDOS (aparatos para ayudar a caminar a enfermos o a inválidos A61H 3/00 ); SILLAS O MESAS DE OPERACIONES; SILLONES DE DENTISTA; DISPOSITIVOS DE INHUMACION (embalsamado cadáveres A01N 1/00). › A61G 13/00 Mesas de operaciones; Sus accesorios (iluminación de mesas de operaciones F21L, F21S o F21V). › Apoyos adaptados al efecto; Disposición de superficies para el soporte de los pacientes.
Fragmento de la descripción:
DISPOSITIVO DE GUIADO Y SUJECiÓN PARA CIRUGíA DE MíNIMA INCISiÓN DEL PIE O MANO
Objeto de la invención El objeto de la presente invención es dotar a los cirujanos especializados en podología y traumatología de pie o mano, de un dispositivo de guiado y sujeción que les facilite la correcta realización de las intervenciones quirúrgicas de mínima incisión, asegurando que la ejecución y el postoperatorio se desarrollen de acuerdo con la planificación.
Sector de la técnica La presente invención hace referencia a un dispositivo para la cirugía percutánea de mínima incisión del pie o mano.
Antecedentes de la invención La MIS (Cirugía de Mínima Incisión) o cirugía percutánea, es un método quirúrgico que permite realizar intervenciones a través de incisiones mínimas de entre 4 y 5 mm, reduciendo el trauma causado a los tejidos próximos. Estas incisiones pueden curarse sin sutura, aunque, para asegurar un correcto cicatrizado, se suele realizar una sutura de 1 a 3 puntos simples.
Esta técnica se utiliza para cirugía percutánea de partes blandas (tenotomía, alargamiento tendinoso, desbridamiento tendinoso o capsulotomía) o en partes óseas (exostosectomías o osteotomías) .
La práctica de estas técnicas de cirugía percutánea deben llevarse a cabo por podólogos o cirujanos con experiencia que conozcan exactamente las estructuras anatómicas implicadas en cada cirugía, con amplios conocimientos de la biomecánica para prever cómo quedará la función biomecánica tras la cirugía. El cirujano ha de realizar con gran precisión los gestos quirúrgicos, ya que pueden llegar a lesionar partes sanas o incluso llegar a realizar mutilaciones. De igual manera la elección de la osteotomía completa o incompleta, queda marcada por la experiencia y la destreza del profesional. Éste planificará, por ejemplo, una osteotomía incompleta y sólo quedará de esta forma si es lo suficientemente diestro para no romperla. Cada deformidad digital es diferente; el número y la orientación espacial de las osteotomías necesarias para su corrección vendrán determinados por la posición de cada falange, los reajustes de acomodación que sufren los elementos anatómicos tendinosos y capsulares y el grado de afectación articular. Las osteotomías se realizan mediante cuñas correctoras, cuya apertura se localiza en el lado opuesto a la deformidad dejando intacta la porción de cortical contraria a la misma, pero lo suficientemente debilitada para permitir su cierre, aportando un adecuado contacto de los fragmentos resultantes y evitando su desplazamiento, de esta forma, conseguiremos la corrección necesaria plantarflexionando, dorsiflexionando, aduciendo o abduciendo el segmento óseo que tratemos.
Para realizar estas técnicas de cirugía de mínima incisión, se sigue el siguiente proceso:
Anamnesis; Exploración física; Exploraciones complementarias: ; Planificación: utilizando la información previa se define como solucionar la patología, se realizará la cirugía, la cual sigue estos pasos (punto de incisión, ángulo de abordaje, trayectoria de abordaje, gestos quirúrgicos percutáneos) ; Anestesia; Colocación del paciente; Cirugía de partes blandas u óseas; Control radiológico; Sutura, desinfección y fijación; Revisión.
El instrumental que se utiliza para la cirugía de mínima incisión para el pie o mano es:
Inyección anestésica; Bisturí y mango de bisturí; Limas (Lewis, Bell, Polokoff, MiniPolokoff) ; Fresas (Shannon-Isham, Shannon 44 corta, Shannon 44 mediana, Shannon 44 larga, Brophy, Wedge 3.1 y 4.1) ; Elevadores Freer, Curvo, Locke, Sebileau) ; Pinzas hemostáticas; Porta agujas, agujas curvas, rectas e hilo; Tijeras; Pinzas de disección; Instrumental motorizado: Micromotor y pieza de mano con reductora; Instrumental radiológico (fluoroscopio) ; y el material propio de cada cirugía.
En la realización de intervenciones quirúrgicas de mínima incisión, es frecuente no conseguir con precisión la corrección de la deformidad, ya que requiere de una curva de aprendizaje muy alta. Algunos de los errores que se producen en este tipo de intervenciones no tienen solución. La razón por la que se comenten la mayoría de estos errores es por una inadecuada ejecución del acto quirúrgico por parte del cirujano. La ejecución de la cirugía de MIS, tiene una gran dificultad ya que el cirujano no visualiza lo que hace guiándose únicamente con el control radiológico y la anatomía externa del paciente.
Errores que se comenten durante el acto quirúrgico en intervenciones de pie o mano de MIS:
Daños en vasos sanguíneos, nervios o tendones, al no aparecer en el control radiológico el cirujano se basa en su experiencia. La estandarización de las técnicas, sin tener en cuenta el grado de severidad debiendo ampliar más el ángulo de la osteotomía, se aumentará el número de fracasos. La excesiva agresividad quirúrgica sobre tejidos blandos y partes óseas, provocarán procesos inflamatorios postoperatorios de mayor duración. Cualquier osteotomía mal diseñada o mal ejecutada, podría producir un retraso de osificación o una no unión. Si la ejecución y consolidación de la osteotomía no es exacta, provocará un acortamiento del segmento óseo tratado aumentando, por ejemplo, el porcentaje de trasferencias de presión en el pie. Al planificar una osteotomía incompleta, ésta puede romperse y desplazarse provocando una mala alineación y cierre de las osteotomías posteriores. Rotura de osteotomías proximales provocando una hipercorrección o mala alineación En las intervenciones quirúrgicas de mínima incisión para pie o mano, se cometen errores que no cumplen las premisas de la Ley de presión de Wolf para una óptima consolidación ósea, tanto en la realización de la osteotomía, como en el vendaje postquirúrgico, pudiendo acabar el hueso en una posición inadecuada.
En el estado del arte se han encontrado múltiples patentes que definen dispositivos destinados al guiado del instrumental quirúrgico en una gran variedad de intervenciones como cadera, rodilla, craneo, etc. Se indican varias patentes que tiene relevancia en cuanto al guiado quirúrgico: La patente "Drill guide for angled trajectories" nº W02010/062634, propone un dispositivo para el guiado de la broca que perfora el hueso en los agujeros de una placa de unión de huesos. Este dispositivo de guiado no está destinado a cirugías de mínima incisión en pie o mano.
La patente "5urgical jig" nº W2005/041785, propone un dispositivo de guiado para realizar una osteotomía en el primer metatarsiano del pie. La cirugía que se realiza con este dispositivo no es de mínima incisión, se ha de realizar un corte de entre 4 y 10 cm y raspar la superficie del hueso para fijar el dispositivo todo ello unido a los problemas que pueden generarse por una cirugía abierta, en la que se cortan múltiples tejidos y vasos sanguíneos. Existen técnicas MI5, para realizar osteotomías diafisarias equivalentes. Con este dispositivo no se puede realizar una osteotomía de mínima incisión.
La patente "5urgical instrument for facilitating accurate ostetomy cuts in bone and method for utilizing same" nº U5005112334, propone un dispositivo de guiado para realizar una osteotomía en un ángulo determinado. Para fijar este dispositivo al hueso se ha de realizar una incisión de 2 a 4 cm y raspar la superficie del hueso. Con este dispositivo no se puede realizar una osteotomía de mínima incisión.
Descripción de la invención La presente invención define un dispositivo de guiado y sujeción destinado a diferentes intervenciones de cirugía de mínima incisión del pie o mano, que soluciona varios de los problemas que se producen durante el acto quirúrgico y el postoperatorio.
El dispositivo descrito en la presente invención, reduce las posibilidades de error al realizar una cirugía de mínima incisión, según lo planificado previamente al acto quirúrgico, reduciendo los factores de error dependientes de la habilidad y destreza del cirujano.
Este dispositivo ayuda a reducir la utilización del control radiológico, minimizando la radiación que recibe el paciente, el equipo médico que interviene en la cirugía.
La fijación de dispositivos de guiado en las estructura óseas son incompatibles con las intervenciones MIS, por lo que el dispositivo descrito en la presente invención realiza el guiado en cirugías de mínima incisión MIS, sin necesidad de fijar la pieza de guiado en contacto con una estructura ósea. Este dispositivo se utiliza en pies o manos, por contar estas extremidades con muy pocas zonas blandas que rodeen los huesos, por esta razón, la envolvente queda ajustada e inmoviliza la zona que recubre el pie o mano....
Reivindicaciones:
1. Dispositivo de guiado y sujeción para cirugía de mínima incisión del pie o la mano caracterizado por disponer al menos de una pieza guía (8a) , con la que se limita la zona de actuación (9a) del instrumental quirúrgico convencional como bisturís, raspas y fresas motorizadas, que se utiliza para las intervenciones quirúrgicas de mínima incisión en pie o mano. La pieza guía (8b) tiene al menos un agujero pasante de guiado puntual (l1a) o que forma un recorrido (12a) en el plano de los ejes xv (lOa) , este agujero es pasante en la dirección del eje Z (lOa) . El agujero pasante (l1b) - (12b) de la pieza guía (8c) , tiene al menos una pared superior (15) con un ángulo "a" (13a) que limita la inclinación en la que se puede posicionar el instrumental quirúrgico (18a) , este ángulo "a" puede variar a lo largo de las paredes en diferentes valores de ángulo "a'" (13b) . La pared superior (15) es recta, cóncava, convexa o varia a lo largo de la pared, dependiendo de la zona de actuación (9b) del instrumental quirúrgico. El agujero pasante (l1b) - (12b) , tiene un tope (16) que limita la profundidad a la que se puede introducir el instrumental quirúrgico. El agujero pasante (l1b) - (12b) , tiene al menos una pared inferior con una forma ovalada (17a) o en ángulo "b" (17b) , que no produzca una limitación al instrumental quirúrgico mayor que las paredes superiores (15) . La superficie del tope (16) es recta, cóncava o convexa, o varia a lo largo del tope. Dispone de una envolvente (2a) sujeta y fijada al pie o la mano en el que se va a realizar la cirugía. La envolvente está formada por al menos dos piezas (3a) que aprisionan el pie o la mano, las piezas tienen medios convencionales para unirse y separarse (4) entre ellas como tornillos, ajuste sin juego, conectores rápidos, mecanismo de cierre, flejes, pestañas, pernos, imanes, velcro, cremallera o pinzas. La envolvente (2b) tiene al menos un agujero pasante (14) , en el que encajar la pieza guía (8c) en la posición y orientación correcta. La envolvente y la pieza guía disponen de medios convencionales de unión (19a) que permiten su montaje y/o desmontaje como tornillos, ajuste sin juego, conectores rápidos, conectores electromecánicos, mecanismo de cierre, pernos o flejes. La unión (19a) entre la pieza guía (8c) y la envolvente (2b) puede ser permanente con medios convencionales como soldadura, adhesivos, encaje por presión o que la pieza guía esté constituida en la misma envolvente. La pieza guía, la envolvente y los elementos de unión son preferentemente de material transparente o translúcido a la radiación electromagnética visible y/o a la radiación convencional utilizada para pruebas radiológicas.
2. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1, caracterizado por disponer la pieza guía (8d) de al menos un agujero pasante de instrumental quirúrgico (21) , en la dirección del eje Z (10b) , mayor que la parte del instrumental quirúrgico que ejecuta la cirugía. El agujero pasante de guiado (12c) y el agujero pasante de instrumental (21) , están unidos o conectados por un camino (20) que permite pasar el instrumental de un agujero al otro.
3. Dispositivo de guiado quirúrgico de acuerdo a la definición de la reivindicación 1, caracterizado por disponer en la pieza guía (8e) o en la envolvente (2c) al menos de un agujero pasante (22) para introducir en la posición y orientación correcta el equipamiento/instrumental quirúrgico convencional como cámara endoscópica, tornillos y agujas para la fijación de fragmentos óseos. Los agujeros pasantes (22) han de tener un diámetro mayor que la parte del equipamiento/instrumental quirúrgico que se introduce.
4. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1, caracterizado por disponer al menos de un drenaje de fluidos. La pieza guía (8f) o la envolvente (2d) tienen al menos un canal de drenaje (23) en la zona en contacto con la piel y conectados al menos a un agujero pasante al exterior (24) de la envolvente. Los canales permiten disponer al menos de una zona de absorción (25) , donde colocar material absorbente convencional como gasas, tejidos, compresas, sales o algodón. En las zonas de absorción se pueden colocar también medios de cultivo para analizar la esterilización del acto quirúrgico.
5. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1, caracterizado por que la envolvente (2e) es de un material (26) convencional como alginato, escayola, epoxi o polímero, que se aplica sobre el pie o mano (lb) y se solidifica en menos de 30 minutos, adaptándose a la forma exacta del pie o la mano. Las piezas guía (8g) se colocan en la posición y orientación correcta, con medios convencionales como de un brazo articulado multi-eje (27) , antes de solidificarse el material de la envolvente. Aplicando de nuevo más material (26) tras su solidificación, se obtiene más de una pieza para la envolvente que se pueden ensamblar y desensamblar.
6. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 y/ó 5, caracterizado por que la envolvente (2f) es un exoesqueleto o estructura estandarizada para diferentes tamaños de pies o manos, con posibilidad de regulación. Dispone de al menos de una pieza de sujeción (30) la cual cuenta con al menos una zona de sujeción
(28) que se acopla al pie o la mano restringiendo su movilidad con respecto a la pieza guía (8h) . La pieza de sujeción se une y regula en posición al menos a una fijación para piezas guía (29) , con al menos una unión (32) y regulación (31) convencional como carril con unión por tornillos, tubos telescópicos con unión por pinzas. La fijación para piezas guía (29) , tiene al menos una unión (19b) donde acoplar la pieza guía (8h) en una posición y orientación predeterminada.
7. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 y/ó Sy/ó 6, caracterizado por que la envolvente es un exoesqueleto o estructura personalizada (2g) al pie o mano y a las técnicas quirúrgicas de mínima incisión a realizar. Con los datos de la estructura tridimensional, composición interna tridimensional del pie o mano y la planificación de la cirugía se construye una envolvente personalizada con técnicas CAM (fabricación asistida por computadora) convencional como impresión 3D, mecanizado, estereolitografía laser o sinterizado laser.
8. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 y/ó 5 y/ó 6 Y 7, caracterizado por que la envolvente (2h) es un calcetín o guante semirrígido, que dispone en su superficie de al menos una marca (33) como tinta, resaltes o rebajes, que indica donde se colocan las piezas guía. A la envolvente (2h) tipo calcetín o guante, se le pueden añadir suplementos parciales de envolventes adaptables (2e) , exoesqueletos estándar (2f) o exoesqueletos personalizados (2g) .
9. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 ó 5 ó 6 ó 7 ó 8, caracterizado por disponer en la envolvente (2i) al menos de un elemento auxiliar de acople (34) con una forma específica según las necesidades de la intervención, como cuñas, láminas o gasas. El elemento auxiliar se une a la envolvente con medios convencionales de unión (35) que permiten su montaje y/o desmontaje como, tornillos, ajuste sin juego, conectores rápidos, conectores electromecánicos, mecanismo de cierre, pernos, flejes o velcro.
10. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 ó 5 ó 6 ó 7 ó 8, caracterizado por disponer en la envolvente (2j) al menos de un elemento auxiliar de acople (36) con el que se colocan los dedos en la posición correcta tras la cirugía. El elemento auxiliar de acople se une a la envolvente con medios convencionales (37) que permiten su montaje y/o desmontaje, como tornillos, ajuste sin juego, conectores rápidos, conectores electromecánicos, mecanismo de cierre, pernos, flejes.
11. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 ó 5 ó 6 ó 7 ó 8, caracterizado por disponer al menos de una pieza (38) para fijar y colocar la envolvente (2k) en una posición y orientación determinada con respecto al banco-silla de operaciones (39) . La pieza (38) es un brazo articulado, cuña o escuadra. La pieza de
fijación y colocación (38) está unida a la envolvente (2k) y al banco-silla de operaciones (39) , con medios convencionales como tornillos, ajuste sin juego, conectores rápidos, mecanismo de cierre, flejes, pestañas, pernos, imanes, velero, ventosa, cremallera o pinzas.
12. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 ó 5 ó 6 ó 7 ó 8, caracterizado por disponer al menos de una suela (40) , fijada a la envolvente (21) por medios convencionales como tornillos, ajuste sin juego, conectores rápidos, mecanismo de cierre, flejes, pestañas, pernos, imanes, velcro, cremallera o pinzas. Esta suela es sólo para la cirugía del pie.
13. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1, caracterizado por disponer de una interface de posicionamiento y rotación (44) entre la pieza guía y la envolvente, con la que realizar ajustes de posición y rotación de la pieza guía con respecto a la envolvente. La interface de posicionamiento (44) dispone de una unión (48) a la envolvente y otra unión (46) a la pieza guía con los mismos medios convencionales empleados entre la unión envolvente y la pieza guía. La interface de posicionamiento tiene medios convencionales para desplazarse (45) en al menos uno de los ejes X, Y Y Z (lOe) , como tornillos sin fin, poleas, engranajes, motores lineales o pistones hidráulicos. La interface de posicionamiento (44) tiene medios convencionales para rotar (47) en al menos uno de los ejes X, Y Y Z (lOe) , como tornillos, volantes con engranaje, tornillos sin fin, poleas, engranajes, motores lineales o motores rotativos.
14. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 1 ó 13, caracterizado por disponer de al menos un sensor-emisor-marcador (49a) en una posición conocida y al menos un receptor (51a) . Con el sensor-emisor-marcador y receptor se determina la posición y orientación de la pieza guía (8j) , del instrumental quirúrgico o la interface de posicionamiento, con respecto a la envolvente (2m) del pie o la mano. El sensor-emisor-marcador y el receptor son convencionales como: sensores en CI de compás, sensores en CI giroscópico, triangulación por emisor-receptor laser, escaneado laser por emisor-receptor laser, escaneado por luz estructurada con receptor óptico, triangulación por emisor-receptor ultrasonidos, marcadores de posición-orientación opacos a los rayos X, fluoroscopía o marcadores de posición-orientación para receptor de visión artificial. La información de los sensores-emisores-marcadores y/o receptor, se transfiere a un equipo de control electrónico específico (52a) u ordenador convencional (52a) , donde se procesan los datos, obteniendo la visualización en al menos una pantalla (53a) de los datos de la posición y orientación del pie o mano, la pieza guía, el
instrumental quirúrgico, la interface de posicionamiento y la envolvente. El instrumental quirúrgico mediante la incorporación de sensores (50a) convencionales como tacómetros, acelerómetros, sensores de presión, galga extenso métrica, sensor de fuerza triaxial, sensores de temperatura, encoder, sensores de proximidad, sensores inerciales o sensores de radiación electromagnética, obtiene datos técnicos adicionales del acto quirúrgico.
15. Dispositivo de guiado y sujeción de acuerdo a la definición de la reivindicación 14, caracterizado por disponer de la visualización virtual en tiempo real durante la ejecución de la cirugía del pie o mano con técnicas convencionales de realidad virtual o aumentada (54) . Esta visualización se realiza con un equipo de control electrónico específico (52b) u ordenador convencional (52b) , que recibe los datos de la estructura tridimensional del pie o mano (56) , obtenidos de las pruebas radiológicas convencionales como TAC (Tomografía axial computarizada) , TC (Tomografía computarizada) o RM (Resonancia magnética) . El ordenador (52b) procesa la información recibida de los sensores-emisor-marcador (49b) y
receptores (51b) , los sensores del instrumental (50b) , los datos de las pruebas radiológicas (56) y los datos de planificación de la cirugía (57) . Con estos datos se genera una representación virtual en al menos una pantalla (53b) de lo que ocurre en el interior del pie o la mano durante el acto quirúrgico.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]