SOPORTE DE LOCALIZACION RELATIVA.
Un procedimiento que comprende:
recibir al menos un conjunto de datos sobre señales satelitales desde al menos un primer receptor (22,
42, 62, 72) del sistema satelital de navegación global, estando cada conjunto recibido de datos asociado a un instante temporal específico;
estimar datos para al menos un conjunto adicional de datos asociado a un respectivo instante temporal adicional, sobre la base de dicho(s) conjunto(s) recibido(s) de datos; y
proporcionar datos de dicho(s) conjunto(s) adicional(es) de datos, además de los datos de dicho(s) conjunto(s) recibido(s) de datos, para una determinación de una posición de al menos un segundo receptor (12, 32, 62, 72, 212, 221, 232, 242, 252) del sistema satelital de navegación global, con respecto a una posición de dicho(s) primer(os) receptor(es) (22, 42, 62, 72) del sistema satelital de navegación global, caracterizado porque dicha estimación de datos para al menos un conjunto adicional de datos comprende al menos una entre:
extrapolar datos seleccionados de dicho(s) conjunto(s) recibido(s) de datos según una tasa de cambio de dichos datos seleccionados, estando esta tasa de cambio determinada a partir de un valor de dicho(s) conjunto(s) recibido(s) de datos; e
interpolar datos seleccionados de al menos dos conjuntos recibidos de datos según una tasa de cambio de dichos datos seleccionados, estando esta tasa de cambio determinada a partir de un valor de cada uno de dichos dos, o más, conjuntos recibidos de datos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2006/051714.
Solicitante: NOKIA CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KEILALAHDENTIE 4,02150 ESPOO.
Inventor/es: SYRJARINNE,JARI, WIROLA,LAURI.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Junio de 2010.
Clasificación Internacional de Patentes:
- G01S19/29 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › relacionado con la portadora.
- G01S19/43 G01S 19/00 […] › empleando medidas de fase de la portadora, p. ej. posicionamiento cinemático; empleando interferometría de línea base larga o corta.
- G01S5/14S1B1
Clasificación PCT:
- G01S1/00 G01S […] › Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Fragmento de la descripción:
Soporte de localización relativa.
Campo de la invención
La invención se refiere a un procedimiento que brinda soporte a la localización relativa de un montaje.
Antecedentes de la invención
La localización, basada en satélite, de un dispositivo dispone de soporte de diversos Sistemas Satelitales de Navegación Global (GNSS). Estos incluyen, por ejemplo, el Sistema Estadounidense de Localización Global (GPS), el Sistema Satelital Ruso de Navegación Global (GLONASS), el futuro sistema europeo Galileo, los Sistemas de Incremento de Base Espacial (SBAS), el Sistema Satelital Japonés Quasi-Cenit de incremento del GPS (QZSS), los Sistemas Locales de Incremento de Áreas (LAAS) y los sistemas híbridos.
La constelación en el GPS, por ejemplo, consiste en más de 20 satélites que orbitan la Tierra. Cada uno de los satélites transmite dos señales portadoras L1 y L2. Una de estas señales portadoras, L1, se emplea para llevar un mensaje de navegación y señales de código de un servicio de localización estándar (SPS). La fase portadora de L1 es modulada por cada satélite con un código distinto de C/A (Adquisición Gruesa). Así, se obtienen distintos canales para la transmisión por los distintos satélites. El código C/A es un código de ruido seudoaleatorio (PRN), que está esparciendo el espectro sobre un ancho de banda de 1 MHz. Se repite cada 1023 bits, siendo el periodo de referencia del código 1 mseg. La frecuencia portadora de la señal L1 se modula adicionalmente con información de navegación a una tasa de bits de 50 bits/seg. La información de navegación comprende, entre otros, efemérides y parámetros de almanaque. Los parámetros de efemérides describen secciones breves de la órbita del respectivo satélite. Sobre la base de estos parámetros de efemérides, un algoritmo puede estimar la posición del satélite en cualquier momento mientras el satélite esté en la respectiva sección descrita. Los parámetros de almanaque son parámetros de órbita similares, pero más bastos, que son válidos para un tiempo mayor que los parámetros de efemérides. La información de navegación comprende adicionalmente, por ejemplo, modelos de reloj que refieren la hora del satélite a la hora de sistema del GPS, y la hora del sistema a la Hora Universal Coordinada (UTC).
Un receptor del GPS, cuya posición ha de determinarse, recibe las señales transmitidas por los satélites actualmente disponibles, y detecta y rastrea los canales utilizados por los distintos satélites, sobre la base de los distintos códigos C/A comprendidos. Entonces, el receptor determina la hora de transmisión del código transmitido por cada satélite, habitualmente sobre la base de los datos en los mensajes de navegación descodificados y de contadores de periodos de referencia y de chips de los códigos C/A. La hora de transmisión y la hora de llegada de una señal, medida en el receptor, permiten la determinación de la seudodistancia entre el satélite y el receptor. El término seudodistancia indica la distancia geométrica entre el satélite y el receptor, distancia esta que está sesgada por desplazamientos desconocidos de satélite y de receptor con respecto a la hora de sistema del GPS.
En un posible esquema de solución, el desplazamiento entre los relojes del satélite y del sistema se supone conocido y el problema se reduce a resolver un conjunto no lineal de ecuaciones de cuatro incógnitas (3 coordenadas de posición del receptor y el desplazamiento entre los relojes del receptor y del sistema GPS). Por lo tanto, se requieren al menos 4 mediciones a fin de poder resolver el conjunto de ecuaciones. El resultado del proceso es la posición del receptor.
De manera similar, la idea general de localización del GNSS es recibir señales satelitales en un receptor que ha de ser localizado, medir el tiempo que tomaron las señales para propagarse desde el satélite al receptor, deducir de ellos la seudodistancia entre el receptor y el respectivo satélite y adelantar la posición actual del receptor, haciendo uso, además, de posiciones estimadas de los satélites. Usualmente, se evalúa una señal de PRN, que ha sido utilizada para modular una señal portadora, para la localización, según lo anteriormente descrito para el GPS.
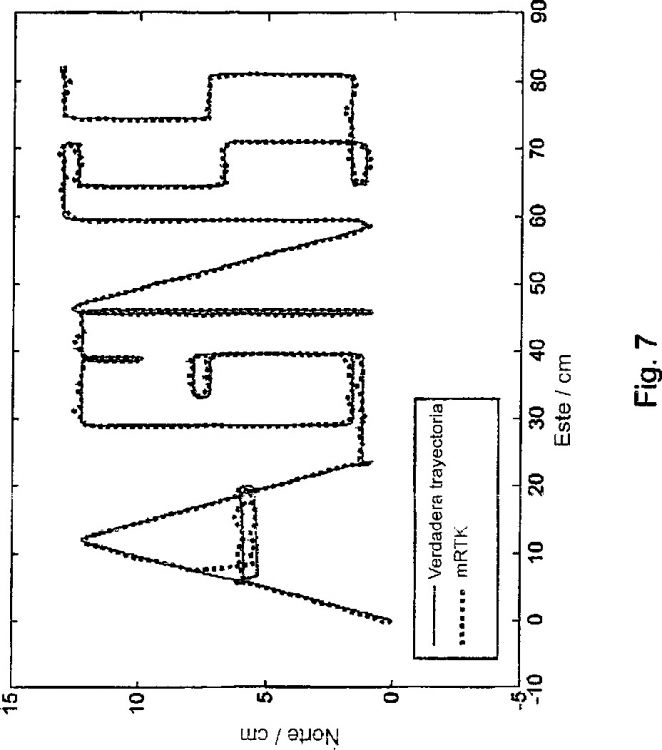
En un enfoque adicional conocido como Cinemática en Tiempo Real (RTK), las fases portadoras medidas en dos receptores del GNSS se evalúan para determinar la distancia y la actitud entre los dos receptores muy exactamente, habitualmente, con precisión en el nivel de los cm o incluso los mm. La combinación de la distancia y actitud entre dos receptores también se denomina una línea base. Las mediciones de fase portadora que se efectúan en los receptores del GNSS para una localización por RTK pueden intercambiarse en tiempo real o almacenarse para un intercambio posterior, conocido como posprocesamiento. Habitualmente, uno de los receptores del GNSS se dispone en una ubicación conocida y se llama receptor de referencia, mientras que el otro receptor ha de situarse con respecto al receptor de referencia, y ha de llamarse receptor de usuario o vagabundo. La posición relativa determinada puede convertirse posteriormente en una posición absoluta, si la ubicación de la posición de referencia se conoce exactamente. Sin embargo, los cálculos de RTK requieren efectivamente que las posiciones de ambos receptores se conozcan al menos aproximadamente. Estas posiciones pueden obtenerse a partir de determinadas seudodistancias.
Una señal satelital se distorsiona en su camino desde un satélite a un receptor, debido, por ejemplo, a la propagación multitrayectoria, y debido a influencias de la ionosfera y la troposfera. Además, la señal satelital tiene un sesgo debido al sesgo del reloj del satélite, y su fase portadora tiene una fase inicial desconocida. Cuando la señal satelital se mide en el receptor, se distorsiona adicionalmente. La medición de la señal contiene, además de los errores anteriores, errores debidos, por ejemplo, al ruido del receptor y al sesgo temporal del receptor. En la RTK tradicional, todos, o la mayoría de, estos errores se suponen correlacionados entre los receptores y los satélites, en cuyo caso los errores desaparecen en la doble diferenciación.
La localización relativa puede, de esta manera, basarse más específicamente en mediciones de señal en dos receptores del GNSS, que se emplean para formar observables por doble diferencia. Tales mediciones de señal pueden incluir, por ejemplo, mediciones de fase portadora y mediciones de código de PRN, etc. Un observable por doble diferencia referido a la fase portadora es la diferencia en la fase portadora de una señal satelital específica en ambos receptores, comparada con la diferencia en la fase portadora de otra señal satelital en ambos receptores. Un observable por doble diferencia referido al código de PRN se obtiene análogamente. Los observables por doble diferencia pueden emplearse luego para determinar la posición relativa de los receptores entre sí, con gran precisión.
Una localización relativa de los receptores del GNSS que hace uso de observables por doble diferencia ha sido descrita, por ejemplo, en la patente estadounidense 6.229.479 B1.
Con una localización estándar del GNSS, dos receptores del GNSS son capaces de determinar su ubicación y, por lo tanto, la línea base entre ellos, con una precisión de entre 5 y 20 metros. En comparación con tal localización estándar del GNSS, es una ventaja del enfoque RTK que permite determinar la línea base con una precisión mucho mayor, de entre 0,1 y 10 cm. Es digno de mención que esta precisión puede lograrse con receptores comerciales estándar del GNSS.
Originalmente, la RTK sólo ha estado disponible para la inspección geodésica y para otras aplicaciones que requieren una alta precisión. El equipo requerido para tales aplicaciones es caro y está concebido, por lo tanto, sólo para uso profesional. Sin embargo, también es posible obtener una línea base de alta precisión utilizando dos equipos de mano de bajo coste habilitados para el GNSS, por ejemplo, terminales con receptor del GNSS integrado, o terminales equipados con un receptor externo del GNSS con Bluetooth. Los datos entre los terminales pueden intercambiarse utilizando cualquier clase de tecnología de transferencia de datos, como el servicio general de radio en paquetes (GPRS), las redes inalámbricas de área local (WLAN) o BluetoothTM. Esto permite que la línea base se determine y se actualice en tiempo real, mientras que, en muchas soluciones convencionales, la línea base se determina fuera de línea. Este enfoque también se llama Cinemática...
Reivindicaciones:
1. Un procedimiento que comprende:
2. Un procedimiento según la reivindicación 1, en el cual dicha tasa de cambio está determinada a partir de un valor de dicho(s) conjunto(s) recibido(s) de datos, que está relacionado con una frecuencia Doppler.
3. Un procedimiento según una de las reivindicaciones 1 a 2, en el cual dichos datos seleccionados comprenden al menos uno entre un valor que está relacionado con una fase portadora de una señal satelital, un valor que está relacionado con una fase de código de una señal satelital, un valor que está relacionado con una seudodistancia y un valor que está relacionado con una fase secundaria de código extendido de una señal satelital.
4. Un procedimiento según una de las reivindicaciones precedentes, en el cual un montaje estacionario (20) comprende dicho(s) primer(os) receptor(es) (22) del sistema satelital de navegación global.
5. Un procedimiento según una de las reivindicaciones precedentes, en el cual un montaje (10, 30, 40, 60, 70, 210, 220, 230, 241, 251) comprende dicho(s) segundo(s) receptor(es) (12, 32, 42, 62, 72, 212, 221, 232, 242, 252) del sistema satelital de navegación global.
6. Un procedimiento según la reivindicación 5, en el cual dicho montaje (10, 60, 70, 210, 220, 230, 241) estima dichos datos para al menos un conjunto adicional de datos.
7. Un procedimiento según una de las reivindicaciones 5 y 6, en el cual dicho montaje (10, 30, 40, 60, 70, 210, 220, 230, 241, 251) determina conjuntos propios de datos sobre la base de señales satelitales recibidas por dicho(s) segundo(s) receptor(es) (12, 32, 42, 62, 72, 212, 221, 232, 242, 252) del sistema satelital de navegación global, a una tasa que corresponde a una tasa de conjuntos recibidos de datos en combinación con conjuntos adicionales de datos.
8. Un procedimiento según una de las reivindicaciones 5 y 6, en el cual dicho montaje (10, 60, 70, 210, 220, 230, 241) determina conjuntos propios de datos sobre la base de señales satelitales recibidas por dicho(s) segundo(s) receptor(es) (12, 32, 62, 72, 212, 221, 232, 242, 252) del sistema satelital de navegación global, a una tasa que corresponde a una tasa a la cual se reciben conjuntos de datos desde dicho primer receptor (22, 42, 62, 72) del sistema satelital de navegación global, y en el cual dicho montaje (10, 60, 70, 210, 220, 230, 241) estima adicionalmente datos para al menos un conjunto adicional de datos sobre la base de dichos conjuntos propios de datos.
9. Aparato (10, 50, 60, 70, 210, 220, 230, 241, 255) que comprende un componente (13, 53, 61, 71, 213, 221, 234, 243, 253) de procesamiento,
estando dicho componente (13, 53, 61, 71, 213, 221, 234, 243, 253) de procesamiento dispuesto para recibir al menos un conjunto de datos sobre señales satelitales desde al menos un primer receptor (22, 42, 62, 72) del sistema satelital de navegación global, estando cada conjunto recibido de datos asociado a un instante temporal específico;
estando dicho componente (13, 53, 61, 71, 213, 221, 234, 243, 253) de procesamiento configurado para estimar datos para al menos un conjunto adicional de datos asociado a un respectivo instante temporal adicional, sobre la base de dicho(s) conjunto(s) recibido(s) de datos; y
estando dicho componente (13, 53, 61, 71, 213, 221, 234, 243, 253) de procesamiento configurado para proporcionar datos de dicho(s) conjunto(s) adicional(es) de datos, además de los datos de dicho(s) conjunto(s) recibido(s) de datos, para una determinación de una posición de al menos un segundo receptor (12, 32, 62, 72, 212, 221, 232, 242, 252) del sistema satelital de navegación global con respecto a una posición de dicho(s) primer(os) receptor(es) (22, 42, 62, 72) del sistema satelital de navegación global, en donde dicho componente (13, 53, 61, 71, 213, 221, 234, 243, 253) de procesamiento está adicionalmente configurado para estimar datos para al menos un conjunto adicional de datos, mediante al menos uno entre:
10. Un aparato (10, 50, 60, 70, 210, 220, 230, 241, 255) según la reivindicación 9, en el cual dicha tasa de cambio está determinada a partir de un valor de dicho(s) conjunto(s) recibido(s) de datos, que está relacionado con una frecuencia Doppler.
11. Un aparato (10, 50, 60, 70, 210, 220, 230, 241, 255) según una de las reivindicaciones 9 a 10, en el cual dichos datos seleccionados comprenden al menos uno entre un valor que está relacionado con una fase portadora de una señal satelital, un valor que está relacionado con una fase de código de una señal satelital, un valor que está relacionado con una seudodistancia y un valor que está relacionado con una fase secundaria de código extendido de una señal satelital.
12. Un aparato (10, 50, 210, 220, 230, 241, 255) según una de las reivindicaciones 9 a 11, en el cual un montaje estacionario (20) comprende dicho(s) primer(os) receptor(es) (22) del sistema satelital de navegación global.
13. Un aparato (10, 60, 70, 210, 220, 230, 241) según una de las reivindicaciones 9 a 12, comprendiendo el aparato dicho(s) segundo(s) receptor(es) (12, 62, 72, 212, 221, 232, 242) del sistema satelital de navegación global.
14. Un aparato (10, 60, 70, 210, 220, 230, 241) según la reivindicación 13, estando el aparato configurado para determinar conjuntos propios de datos sobre la base de señales satelitales recibidas por dicho(s) segundo(s) receptor(es) (12, 62, 72, 212, 221, 232, 242) del sistema satelital de navegación global, a una tasa que corresponde a una tasa de conjuntos recibidos de datos en combinación con conjuntos adicionales de datos.
15. Un aparato (10, 60, 70, 210, 220, 230, 241) según la reivindicación 13, estando el aparato configurado para determinar conjuntos propios de datos sobre la base de señales satelitales recibidas por dicho(s) segundo(s) receptor(es) (12, 62, 72, 212, 221, 232, 242) del sistema satelital de navegación global, a una tasa que corresponde a una tasa a la cual se reciben conjuntos de datos desde dicho primer receptor (22, 62, 72) del sistema satelital de navegación global, en donde dicho componente (13, 61, 71, 213, 221, 234, 243) de procesamiento está configurado para estimar datos para al menos un conjunto adicional de datos sobre la base de dichos conjuntos propios de datos.
16. Un dispositivo (10, 60, 70, 210, 220, 230, 241) del sistema satelital de navegación global, que comprende
17. Un dispositivo (10, 50, 60, 70, 210, 220, 230, 255) de comunicación inalámbrica que comprende
18. Un montaje (10, 60, 70, 210, 220, 230) que comprende
19. Un servidor (50) que comprende un aparato según una de las reivindicaciones 9 a 15, y un componente (51) de comunicación inalámbrica, configurado para recibir resultados de mediciones sobre señales satelitales desde dicho(s) primer(os) receptor(es) (42) del sistema satelital de navegación global y desde dicho(s) segundo(s) receptor(es) (32) del sistema satelital de navegación global.
20. Un código de programa de software, realizando dicho código de programa de software el procedimiento de una de las reivindicaciones 1 a 8 cuando es ejecutado por un procesador.
Patentes similares o relacionadas:
 METODO Y APARATO PARA UN SISTEMA DE NAVEGACION CON SUSCEPTIBILIDAD REDUCIDA A INTERFERENCIAS Y PERTURBACIONES, del 20 de Noviembre de 2009, de THE BOEING COMPANY: Un sistema de navegación que comprende: un receptor de referencia ; un receptor de usuario ; un satélite del sistema de posicionamiento […]
METODO Y APARATO PARA UN SISTEMA DE NAVEGACION CON SUSCEPTIBILIDAD REDUCIDA A INTERFERENCIAS Y PERTURBACIONES, del 20 de Noviembre de 2009, de THE BOEING COMPANY: Un sistema de navegación que comprende: un receptor de referencia ; un receptor de usuario ; un satélite del sistema de posicionamiento […]
Procedimiento y sistema de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras emitidas por satélites y de correcciones ionosféricas, del 8 de Febrero de 2017, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Procedimiento de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras de primera, segunda y tercera frecuencias distintas, de valores […]
Método y dispositivo para seguimiento de señales con al menos una subportadora, del 10 de Agosto de 2016, de Airbus DS GmbH: Un sistema configurado para determinar una estimación τ ^ de retardo de un retardo de transmisión sufrido por una señal de navegación recibida en el sistema […]
 Dispositivo de seguimiento de señales de radionavegación, del 11 de Noviembre de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110'), que comprende una primera etapa de seguimiento de una primera señal de radionavegación […]
Dispositivo de seguimiento de señales de radionavegación, del 11 de Noviembre de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110'), que comprende una primera etapa de seguimiento de una primera señal de radionavegación […]
 Método para auto-calibración de las desviaciones de frecuencias, del 16 de Octubre de 2013, de ASTRIUM GMBH: Un método para auto-calibración de desviaciones de frecuencias de señales procedentes de un satélite GNSS enun equipo de medida de un sistema de control […]
Método para auto-calibración de las desviaciones de frecuencias, del 16 de Octubre de 2013, de ASTRIUM GMBH: Un método para auto-calibración de desviaciones de frecuencias de señales procedentes de un satélite GNSS enun equipo de medida de un sistema de control […]
 Procedimiento de estimación de un parámetro de un máximo o mínimo local de una función de correlación derivada de una señal recibida, del 17 de Mayo de 2012, de QUALCOMM INCORPORATED: Un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada a partir de una señal recibida, realizado en un […]
Procedimiento de estimación de un parámetro de un máximo o mínimo local de una función de correlación derivada de una señal recibida, del 17 de Mayo de 2012, de QUALCOMM INCORPORATED: Un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada a partir de una señal recibida, realizado en un […]
Método PPP-RTK y sistema para la determinación de posición a base de señal de GNSS, del 17 de Agosto de 2016, de Fugro N.V: Método para el cálculo de correcciones de GNSS para la transmisión a un móvil , utilizando un sistema de corrección de señales de GNS que comprende una estación […]
Coherencia de frecuencia en una red de localización, del 22 de Abril de 2015, de QX CORPORATION PTY LTD: Un método para el seguimiento de la frecuencia de bucle abierto del componente portador de una señal de posicionamiento de referencia recibida en […]