Procedimiento de geolocalización de múltiples emisores mediante tratamiento espacio-temporal.
Procedimiento de geolocalización de M emisores Em incidentes en una red de K estaciones Sk compuestas cadauna de Nk captadores elementales y de medios de tratamiento de la señal,
caracterizado porque comprende almenos:
a) una etapa durante la cual el vector de observación se amplía integrando el periodo Te de muestreo en elvector de observación de la manera siguiente: **Fórmula**
en la que Te y ρk,lm ≥ρk,me-j2ρf1(ρk(pm)-ρ1(pm)), es el período de muestreo que corresponde a la banda de losreceptores según el teorema de Shannon, x(t) ≥ [x1(t) ... xk(t)]T corresponde a la expresión de la señal recibidaen el conjunto de las K estaciones,
la señal en la estación k-ésima se escribe:**Fórmula**
• xk,n(t) es la t-ésima muestra de la señal en la salida del n-ésimo captador de la k-ésima estación,muestreada a la frecuencia Fe ≥ 1/Te
• sm(t) corresponde a la m-ésima señal temporal emitida por el origen en el instante t, considerando que lasseñales de los emisores son independientes entre sí,
• ρ k,m y θk,m son respectivamente la amplitud compleja y el vector parámetro de interés del m-ésimo origenen la k-ésima estación, el vector θk,m es la dirección de llegada en la estación k, visto como una función dela posición en el plano o el espacio,
• πk,m es el tiempo de trayecto entre el m-ésimo origen y la estación k,
• ak(θ) es la respuesta de la k-ésima red de captadores a un origen de banda estrecha de frecuencia f0 enla estación k que depende del parámetro θ. La portadora f0 corresponde a la frecuencia central de losreceptores,
• nk(t) es el ruido aditivo presente en la k-ésima estación en el instante t.
b) una etapa de estimación conjunta de los ángulos de llegada o de las posiciones de los emisores en cada unade dichas estaciones que aprovecha el modelo lineal siguiente:
con ρk,lm ≥ρk,m e-j2ρf1(ρk(pm)-ρ1(pm)), con el fin de una geolocalización o una etapa de geolocalización directamediante estimación conjunta de los coordenadas de los emisores en el plano o en el espacio,correspondiendo sm(fl, t) a la señal de un filtro de banda 1/LTe centrado alrededor de la frecuencia fl en la quem corresponde al m-ésimo origen,
c) una etapa de geolocalización de los orígenes a partir de las K tuplas de incidencia cuando se efectúa unaestimación conjunta de los ángulos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11179922.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: FERREOL,ANNE, BOSSE,JONATHAN, LAZARBAL,PASCAL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/74 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › Sistemas multicanal especialmente adaptados para la localización de la dirección, p. ej. que tienen un sistema de antenas único capaz de proporcionar indicaciones simultáneas de las direcciones de diferentes señales (sistemas en los que las direcciones de diferentes señales se determinan secuencialmente y se presentan en pantalla simultáneamente G01S 3/04, G01S 3/14).
- G01S5/08 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › La posición de un localizador de dirección único se establece mediante la determinación de la dirección respecto a una pluralidad de fuentes espaciadas de emplazamiento conocido.
PDF original: ES-2442515_T3.pdf
Fragmento de la descripción:
Procedimiento de geolocalización de múltiples emisores mediante tratamiento espacio-temporal
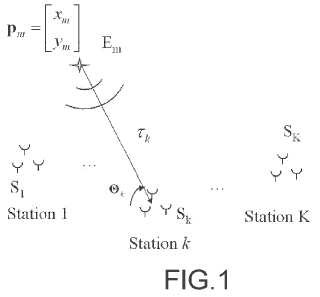
La presente invención se refiere a un procedimiento de geolocalización de múltiples emisores de la posición Ema partir de las señales recibidas en varias estaciones de recepción Sk remotas, que están compuestas de varios captadores (multi-captadores) .
Encuentra particularmente su aplicación en el campo técnico del tratamiento de antenas que tratan las señales de varios orígenes emisores a partir de las señales recibidas en varios captadores. Un conjunto de captadores en una estación se denomina, en lo que sigue, red de antenas o red de captadores y un conjunto de estaciones se denomina red de estaciones.
El presente procedimiento se refiere al campo de la goniometría, la estimación del ángulo de llegada (o de incidencia) de un emisor localizado en el punto Em a partir de las señales de una estación Sk de recepción con multicaptadores. Las coordenadas del punto Em son las componentes del vector pm.
Como se indica en la figura 1, la geolocalización tiene por objetivo estimar las coordenadas pm de los emisores Em en el plano o en el espacio, correspondiendo estas coordenadas a las de los puntos Em representados en la figura 1. La estimación de estas coordenadas se realiza o bien directamente o bien por medio de parámetros de localización tales como los ángulos de llegada de un emisor en cada una de las estaciones.
Una técnica conocida de geolocalización es la triangulación que consiste en estimar las coordenadas del emisor a partir del conocimiento de los ángulos de llegada (o de incidencia) de este emisor en cada una de las estaciones de recepción.
En un contexto electromagnético los captadores son unas antenas y las fuentes radioeléctricas se propagan siguiendo una polarización que depende de la antena de emisión. En un contexto acústico los captadores son, por ejemplo, unos micrófonos y las fuentes son sonoras.
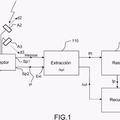
La figura 2 muestra un ejemplo del sistema 10 de tratamiento de antenas donde una red 11 de captadores Ci recibe las señales de varios orígenes o emisores Em de incidencia !m. Uno de los objetivos de las técnicas de tratamiento de antenas es separar o extraer unas informaciones (señal, parámetros, ...) de cada uno de los orígenes, aprovechando la diversidad espacial dependiente de la geometría de la red de antenas de una estación y de la incidencia !m de los orígenes.
Los captadores elementales de una red de una estación de recepción localizada en Sk reciben los orígenes con una fase y una amplitud que dependen en particular de las incidencias de los trayectos y de la posición de los captadores.
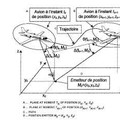
Según la figura 3, la incidencia de un trayecto se define por unos parámetros de dirección !m = {∀my #m} en la que ∀m es el azimut y #m el ángulo de elevación.
El problema técnico que se va a tratar en la presente solicitud de patente es el de la geolocalización de emisores a partir de las señales registradas en varias estaciones multi-captadores por medio de la estimación de los diferentes parámetros de localización, que pueden ser el ángulo de llegada en una estación (AOA: Angle Of Arrival) , el tiempo de llegada en una estación (TOA: Time Of Arrival) o la diferencia de tiempos de llegada entre dos estaciones (TDOA: Time Difference Of Arrival) .
El objetivo del procedimiento es, particularmente, geolocalizar varios emisores de bandas pasantes desconocidas a partir de las señales recibidas en cada una de las estaciones y por tanto resolver uno o varios de los problemas técnicos siguientes:
• geolocalizar de manera no ambigua varios emisores. Para ello el problema técnico consiste en asociar a un mismo emisor los AOA obtenidos en cada una de las estaciones mediante una aproximación del tratamiento de antenas. Esta asociación se realiza a ciegas sin conocimiento a priori de las señales emitidas (secuencia binaria o señal piloto, velocidad, forma de onda, etc...)
• la toma en consideración óptima de la banda pasante de las señales en los algoritmos de geolocalización que son del tipo MUSIC, algoritmo conocido por el experto en la materia:
• sin conocimiento a priori sobre la ocupación espectral de las señales emitidas.
• tratando de manera no ambigua las señales de banda ancha en el sentido de la red de estaciones;
• optimizar las funciones de coste de los algoritmos de geolocalización con un coste de cálculo lo más reducido posible El procedimiento se aplica, por ejemplo, a las técnicas de geolocalización a ciegas (o pasivas) , es decir que no está disponible ninguna información a priori sobre la señal emitida, contrariamente al caso de los sistemas de posicionamiento del tipo GPS, abreviación anglosajona de Global Positioning System, o GALILEO.
La mayor parte de los procedimientos de geolocalización se aplican en tres grandes etapas: una etapa de estimación de los parámetros de localización efectuada independientemente en cada una de las estaciones de recepción, después una etapa de asociación de los parámetros de un mismo emisor y finalmente una etapa de geolocalización que permite estimar la posición de cada emisor a partir de su conjunto de parámetros, que pueden ser los ángulos de llegada en cada una de las estaciones.
• Estimación de los parámetros de localización en una estación La bibliografía es muy abundante sobre el problema de la estimación de los parámetros de localización AOA o TOA. Estos procedimientos de estimación se aplican en una estación o 2 estaciones (para el TDOA) de recepción y no permiten volver a subir directamente a la posición de los emisores, porque el número de coordenadas a estimar es superior al número de parámetros de localización estimados (en el caso del AOA en una estación se estima un único parámetro de localización) . En consecuencia, para geolocalizar un emisor es necesario utilizar varias estaciones de recepción para estimar todas las coordenadas del emisor. Por ejemplo, es posible estimar la posición de un emisor en el plano a partir del los AOA obtenidos en al menos 2 estaciones separadas (triangulación) . Las técnicas tradicionales de geolocalización estiman los parámetros de geolocalización (AOA, TDOA, TOA) por separado en cada una de las estaciones de recepción. En presencia de varios emisores, esto precisa utilizar generalmente unas informaciones a priori sobre las señales emitidas para asociar los parámetros de localización de un mismo emisor.
• Localización de los emisores a partir de los parámetros de localización Generalmente, las técnicas de geolocalización se utilizan sobre todo para las comunicaciones digitales inalámbricas; el caso tratado es por lo tanto el de un origen (teléfono portátil) para el que se dispone de varias informaciones a priori, tal como una señal de referencia o una secuencia de escalonamiento, que permiten identificar un mismo emisor en unas estaciones de recepción remotas. En presencia de varios orígenes es necesario asociar los parámetros de cada uno de los emisores (misma señal de referencia, secuencia de escalonamiento, velocidad, ...) antes de efectuar la etapa de geolocalización a partir de los parámetros de localización estimados en varias estaciones.
• Estimación y asociación de los parámetros de localización La solicitud de patente WO2009/065943 del Solicitante trata de toda la cadena de tratamiento de geolocalización a ciegas (o pasiva) de orígenes en presencia de multi-trayecto a partir de una estimación vinculada a unos ángulos de llegada (AOA) y a unas diferencias de tiempo de llegada de los trayectos desde un mismo origen (TDOA) entre dos estaciones separadas. Sin embargo la estimación vinculada a los parámetros de localización (AOA-TDOA) no aprovecha simultáneamente la totalidad de las señales recibidas por las estaciones remotas. En particular el procedimiento no aprovecha los AOA de la segunda estación y el procedimiento se degrada (o incluso no funciona) en presencia de orígenes de banda estrecha.
• Estimación de la posición de los emisores directamente a partir del conjunto de las señales recibidas Pocos trabajos han propuesto unos algoritmos de geolocalización que efectúen una estimación conjunta de los parámetros de geolocalización directamente a partir de las señales recibidas en el conjunto de las estaciones y que proporcionen a la salida o bien directamente la posición de los emisores, o bien los parámetros de localización de los emisores estimados conjuntamente. Estos trabajos tienen el inconveniente de no aprovechar de manera óptima la banda de las señales. En efecto, estos procedimientos tienen como punto común implementar... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de geolocalización de M emisores Em incidentes en una red de K estaciones Sk compuestas cada una de Nk captadores elementales y de medios de tratamiento de la señal, caracterizado porque comprende al menos:
a) una etapa durante la cual el vector de observación se amplía integrando el periodo Te de muestreo en el vector de observación de la manera siguiente:
)
(Θ ) (t)
&
) &
ax
1, lm 1 1, m
∃∃∃∃∃%
) )
-j21f1 (/k (p) -/1 (p
en la que Te y 0k, lm =0k, memm) ) , es el período de muestreo que corresponde a la banda de los receptores según el teorema de Shannon, x (t) = [x1 (t) ... xk (t) ]T corresponde a la expresión de la señal recibida en el conjunto de las K estaciones, la señal en la estación k-ésima se escribe:
, ,
∃∃∃∃∃%
(Θ ) (
∗
Te )
ML
t
ax
2, lm 2 2, m
/
∗
z (fl )
( )
−
n (t)
f
y (t) =
++
ts
=
.
,
l
1, m
m
##
lm
(Θ (
∗
LTt
ax
∋∋∋∋∋ (∋∋∋∋∋ (
K, lm K K, me xk, 1 (t)
) &∃∃∃∃∃%
(t) =
+,
M m 1
k, lm
a
k
x
k, 2
t
/
∗
k, m
)
−
n (t) xk (t) = (Θ , ) s (
km m
#
xk, Nk (t)
∋∋∋∋∋ (
xk, n (t) es la t-ésima muestra de la señal en la salida del n-ésimo captador de la k-ésima estación, muestreada a la frecuencia Fe = 1/Te 2 sm (t) corresponde a la m-ésima señal temporal emitida por el origen en el instante t, considerando que las señales de los emisores son independientes entre sí, 20k, m y !k, m son respectivamente la amplitud compleja y el vector parámetro de interés del m-ésimo origen en la k-ésima estación, el vector !k, m es la dirección de llegada en la estación k, visto como una función de la posición en el plano o el espacio,
2/k, m es el tiempo de trayecto entre el m-ésimo origen y la estación k, 2 ak (!) es la respuesta de la k-ésima red de captadores a un origen de banda estrecha de frecuencia f0 en la estación k que depende del parámetro !. La portadora f0 corresponde a la frecuencia central de los receptores, 2 nk (t) es el ruido aditivo presente en la k-ésima estación en el instante t.
b) una etapa de estimación conjunta de los ángulos de llegada o de las posiciones de los emisores en cada una de dichas estaciones que aprovecha el modelo lineal siguiente:
)
(Θ ) (t)
&
) &
ax
1, lm 1 1, m
∃∃∃∃∃%
+,
,
,
∃∃∃∃∃%
) )
-j21f1 (/k (p) -/1 (p
con 0k, lm =0k, m emm) ) , con el fin de una geolocalización o una etapa de geolocalización directa mediante estimación conjunta de los coordenadas de los emisores en el plano o en el espacio,
correspondiendo sm (fl, t) a la señal de un filtro de banda 1/LTe centrado alrededor de la frecuencia fl en la que m corresponde al m-ésimo origen, c) una etapa de geolocalización de los orígenes a partir de las K tuplas de incidencia cuando se efectúa una estimación conjunta de los ángulos.
2. Procedimiento de geolocalización según la reivindicación 1, caracterizado porque comprende en el orden 2 las 35 etapas suplementarias siguientes:
una etapa de estimación de la matriz de covarianza de las observaciones a partir de las señales x (t) en la que t pertenece al intervalo {1, T}
T
(Θ ) (
∗
Te )
ML
t
ax
2, lm 2 2, m
/
∗
(fl ) ( )
−
n (t)
f
y (t) =
++
t
z
s
=
.
,
l
1, m
m
##
lm
(Θ (
∗
LTt
ax
∋∋∋∋∋ (∋∋∋∋∋ (
K, lm K K, me ˆ
R
=
y (
i
:
T
e )
y
H
(i
:
T
e )
yy
T
i 1
en la que (.) H designa la transpuesta conjugada, las señales sm (t) se aproximan mediante una suma finita de 15
Qm 6 L orígenes (o componentes) de banda estrecha para el conjunto de la red,
una etapa de estimación de la dimensión D del espacio de señales de la matriz de covarianza Rˆ yy utilizando un procedimiento de detección del número de orígenes mediante un procedimiento conocido por el experto en la materia a partir de los valores propios de esta matriz de covarianza, una etapa del tipo MUSIC de estimación de la matriz lt;b del proyector de ruido obtenida a partir de los elementos propios de Ryy,
b = INL – ESESH
en la que ES = [u1 u2 ... uD] es el espacio de la señal tal que ud es el vector propio asociado al d-ésimo valor ˆ
más grande propio de la estimación Ryy de la matriz de covarianza de la observación y (t) dado que el intervalo de Rˆ yy – Rˆ vale D, correspondiendo el entero D entonces a un número de componentes de banda estrecha
nn de respuesta ) 01, lma1 (Θ1, m ) & ∋∃ ∋02, lma2 (Θ2, m ) ∃
b (fl, 0m, 9m) = z (fl) . u (0lm, 9 m) con u (0lm, 9m) =
∋ # ∃ ∋∃ ∋0K, lmaK (ΘK, m ) ∃
(%
observadas por el vector y (t) .
3. Procedimiento según la reivindicación 1, caracterizado porque comprende, para la estimación conjunta de los ángulos de llegada de los emisores en cada una de las estaciones, con el propósito de una geolocalización, las etapas siguientes:
un aprovechamiento del conjunto de las señales recibidas por las estaciones de manera simultánea, considerando que el ángulo de llegada !k, m del m-ésimo origen en la k-ésima estación, que comprende el azimut ∀k, m para un problema en 2D o cuando el azimut y la elevación {∀k, m # k, m} en 3D !k, m = (∀k, m # k, m) T es una función de la posición pm del origen y posteriormente una etapa de determinación de = = (91 ... 9M) T ,
T]T
conjunto de las direcciones de llegada en la que 9m = [!1, mT ... !K, m los valores {9m, 16m6M} son estimaciones mediante la búsqueda de los M mínimos locales del criterio conducido en un espacio de dimensión K para un problema en el plano y de 2K para un problema en el espacio, la respuesta de la k-ésima red de captadores ak (!) se obtiene o bien por calibración, o bien con ayuda del modelo analítico siguiente:
T
) j 21 f k (Θ) r1, K &
∋ ec ∃ ∋∃
ak (!) = #
∋ f ∃
j 21 0 kT (Θ) rNK K
,
∋ec ∃ ∋∃
(%
en la que rn, K es el vector de posición del n-ésimo captador de la estación k en la referencia de la estación k y en la que c es la velocidad de la onda. k (!) es el vector de onda asociado a la dirección ! de modo que:
) cos (∀ ) cos (#) ∋∃
k (!) = sen (∀ ) cos (#)
∋∃ ∋ sen (#) ∃
(%
ˆT ˆT
una vez obtenidas las estimaciones 9ˆ =
Patentes similares o relacionadas:
Interferómetros, del 24 de Junio de 2020, de LEONARDO MW LTD: Un método para determinar las posiciones relativas de al menos tres antenas de una formación de antenas utilizada en una disposición de interferómetro, la […]
Procedimiento de asociación univalente y unívoca entre emisores y receptores de transmisión a partir del canal de propagación, del 25 de Marzo de 2020, de THALES: Procedimiento de asociación univalente y unívoca, antes del establecimiento de un protocolo de comunicación, a partir del canal (AU_CP) de propagación […]
Procedimiento y sistema de localización distribuida PHDOA, PWDOA, de fuentes emisoras, del 22 de Enero de 2020, de THALES: Procedimiento de localización de al menos una fuente S electromagnética en el seno de una red de comunicación que comprende al menos dos sensores […]
Dispositivo de medición y método de medición para la búsqueda de direcciones y para la determinación de la incertidumbre de dirección, del 29 de Noviembre de 2017, de ROHDE & SCHWARZ GMBH & CO. KG: Dispositivo de medicion para la busqueda de la direccion de una senal electromagnetica, que comprende: - un elemento de antena con […]
 Dispositivo y procedimiento de recuento de emisores electromagnéticos, del 24 de Febrero de 2016, de THALES: Dispositivo radioeléctrico de recuento de emisores (V1, V2, V3, V4, V5, V6) electromagnéticos que incluye:
- al menos dos antenas de […]
Dispositivo y procedimiento de recuento de emisores electromagnéticos, del 24 de Febrero de 2016, de THALES: Dispositivo radioeléctrico de recuento de emisores (V1, V2, V3, V4, V5, V6) electromagnéticos que incluye:
- al menos dos antenas de […]
Procedimiento de estimación del número de fuentes incidentes en una red de sensores mediante la estimación de la estadística del ruido, del 2 de Octubre de 2013, de THALES: Procedimiento de determinación del número de fuentes incidentes en una red que comprende C sensores (4i) quereciben N observaciones y un receptor adaptado […]
 Procedimiento de localización de uno o de varios emisores, del 9 de Abril de 2013, de THALES: Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento […]
Procedimiento de localización de uno o de varios emisores, del 9 de Abril de 2013, de THALES: Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento […]
PROCEDIMIENTO Y SISTEMA PARA ESTIMAR DIRECCIONES DE LLEGADA EN ESCENARIOS DE BAJA POTENCIA O DIMENSIÓN DE MUESTRA REDUCIDA, del 23 de Enero de 2012, de FUNDACIO PRIVADA CENTRE TECNOLOGIC DE TELECOMUNICACIONS DE CATALUNYA: Procedimiento para determinar la dirección de llegada de al menos una forma de onda (wa) de radio, que comprende las etapas de: - recibir al menos una forma de onda […]