Procedimiento de estimación del número de fuentes incidentes en una red de sensores mediante la estimación de la estadística del ruido.
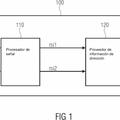
Procedimiento de determinación del número de fuentes incidentes en una red que comprende C sensores (4i) quereciben N observaciones y un receptor (3) adaptado caracterizado porque comprende al menos las siguientesetapas:
Etapa 1: Calcular la matriz B de dimensión NxN observada en N componentes y obtenida a partir de una señalo datos recibida(os) en C sensores de observación:
en la que rk vector de dimensión Nx1 es una transformación más o menos lineal de la observación xk recibidaen los C sensores.
Etapa 2: Calcular los valores propios {λ1, ..., λN} de la matriz B.
Etapa 3: Clasificar los valores propios de la matriz B de la señal para obtener λ1 ≥ ... ≥ λN e inicialización delnúmero de fuentes recibidas en M ≥ Mmax, se puede considerar Mmax igual a N/2 por ejemplo.
Etapa 4.0: Inicialización de i en i ≥ M+1.
Etapa 4.1: i ≥ i-1.
Etapa 4.2: Calcular la media y de la desviación estándar de los valores propios de ruido.
- Calcular la media de los N-i valores propios más pequeños de la matriz B:
- Calcular la desviación estándar de los N-i valores propios más pequeños de la matriz B:
Etapa 4.3: Si λi >λmed + ησ, entonces este valor propio pertenece al espacio señal y el número de fuentespresentes en la mezcla es igual a i, en la que η es un umbral que permite controlar la probabilidad de falsaalarma.
Etapa 4.4: Si λi< λmed + ησ, este valor propio pertenece al espacio ruido, volver a la etapa 4.1.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/070138.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: CHEVALIER, PASCAL, GERMONT,CÉCILE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/74 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › Sistemas multicanal especialmente adaptados para la localización de la dirección, p. ej. que tienen un sistema de antenas único capaz de proporcionar indicaciones simultáneas de las direcciones de diferentes señales (sistemas en los que las direcciones de diferentes señales se determinan secuencialmente y se presentan en pantalla simultáneamente G01S 3/04, G01S 3/14).
- G01S3/80 G01S 3/00 […] › que utilizan ondas ultrasonoras, sonoras o intrasonoras.
PDF original: ES-2441231_T3.pdf
Fragmento de la descripción:
Procedimiento de estimación del número de fuentes incidentes en una red de sensores mediante la estimación de la estadística del ruido La invención se refiere, en particular, a un procedimiento y a su sistema asociado que permite estimar el número de fuentes incidentes en una red que comprende C sensores o antenas en los que se utilizan N observaciones.
Para la descripción que viene a continuación, se va a utilizar la siguiente notación:
! C número de sensores de recepción;
! N número de observaciones no redundantes que se utilizan, por ejemplo, N = C si únicamente se consideran las estadísticas de orden 2 de la señal recibida, N = f (Cq) en la que f (.) es una función polinómica de N de orden Ent (q/2) si se consideran las estadísticas de orden q; ! K el número de muestras de señal para cada observación; ! M es el número de fuentes a estimar; ! x (t) es la señal recibida en la red de sensores, vector de tamaño C.
El problema de la estimación del número de fuentes presentes en una mezcla constituye una etapa crucial en los sistemas de escucha pasiva antes de la aplicación de tratamientos de localización de alta resolución, de técnicas de separación, o incluso de demodulación conjunta. Se trata de detectar (M) fuentes con M comprendido entre 0 y N-1 donde N es el número de observaciones no redundantes utilizadas en los C sensores de la antena de recepción.
En un contexto electromagnético, los sensores son unas antenas y las fuentes radioeléctricas se propagan siguiendo una polarización. En un contexto acústico los sensores son unos micrófonos y las fuentes son sonoras.
Los métodos clásicos de estimación del número de fuentes presentes en una mezcla se basan, por ejemplo, en unas pruebas estadísticas basadas en los valores propios (VP) de la matriz de covarianza de la señal recibida en los sensores de la antena de recepción. Estas pruebas se basan en el conocimiento de la ley de probabilidad de la fluctuación de los valores propios de ruido sabiendo que la matriz de covarianza de la señal se estima a partir de K muestras estadísticamente independientes y que el ruido se considera blanco y gaussiano.
Los valores propios más grandes de la matriz de covarianza corresponden a los valores propios de señal mientras que los valores más pequeños de la matriz corresponden en general al ruido. Asintóticamente (K tiende hacia el infinito) y en presencia de un ruido blanco los valores propios de ruido son todos idénticos. Para un número finito K de muestras, se observan unas fluctuaciones que vuelven la separación entre los valores propios de señal y los valores propios de ruido no inmediata. Para hacer frente a estas fluctuaciones estadísticas, las pruebas más tradicionales son las pruebas del chi cuadrado, AIC y MDL que se van a detallar a continuación y que utilizan la estadística considerada gaussiana del ruido blanco.
Prueba del chi cuadrado Esta prueba consiste en estimar la razón de verosimilitud entre los valores propios de ruido y en probar de forma creciente diferentes hipótesis en el número N-M de valores propios de ruido en la que g (N-M) y a (N-M) representan las medias geométricas y aritméticas de los (N-M) valores propios más bajos de la matriz de covarianza B de la observación, siendo K el número de muestras observadas. La razón de verosimilitud sigue asintóticamente la ley del chi cuadrado de (N-M) 2-1 grados de libertad ya que el ruido se considera blanco y gaussiano, lo que permite fijar un umbral de detección cuando el número de muestras K es elevado (K > 30) .
Prueba AIC (criterio de información de Akaike) y MDL (Minimum Distance Length)
Este criterio lo desarrolló inicialmente H. Akaike para determinar el orden de un modelo [1]. Se basa en el cálculo de la razón de verosimilitud de los valores propios de ruido con la adición de un término correctivo que permite tener en cuenta las situaciones en las que el valor de K es bajo (por ejemplo K < 30) . El número de fuentes se determina entonces como el número entero que minimiza la siguiente cantidad:
en la que g (m) y a (m) representan las medias geométricas y aritméticas de los m= N-M valores propios más bajos de la matriz de covarianza B de una observación, siendo K el número de muestras observadas.
Se ha propuesto otra prueba para hacer frente al problema de consistencia de la prueba AIC, se trata del criterio de la longitud de distancia mínima o MDL que introduce un término correctivo modificado.
Se propone un método de la técnica anterior [2] para detectar el número de fuentes en presencia de ruido coloreado. Este método se basa en la hipótesis de una red lineal y de señales no correlacionadas.
Criterios empíricos de umbral
Los criterios estadísticos anteriores se basan en una estructura blanca de un ruido aditivo que es gaussiano. En la práctica, el ruido ni es blanco, ni gaussiano. En estas condiciones, cuando el número de observaciones K tiende hacia el infinito, los valores propios de ruido ya no son todos idénticos. Es por ello que se han propuesto unos criterios puramente empíricos que buscan clasificar los « pequeños » y los « grandes » valores propios. Estos métodos presentan en particular como inconveniente que hacen hipótesis fuertes o bien sobre la estructura de la matriz de covarianza o bien sobre la de la matriz de covarianza del ruido o bien sobre la de la matriz de covarianza de la señal sin ruido.
Decrecimiento del espectro de los valores propios Cuando unas señales incidentes presentan unas altas correlaciones o unas bajas desviaciones angulares, algunos valores propios del espacio señal se vuelven próximos a los del ruido, lo que conduce a una subestimación del número de fuentes. Se han desarrollado métodos para resolver este problema, postulando una ley de distribución empírica de los valores propios del espacio ruido. La modelización del decrecimiento puede ser lineal o exponencial. La estimación del número de fuentes se basa entonces en la búsqueda de un salto significativo en el decrecimiento de los valores propios. No obstante, es necesario regular un valor de umbral de detección que se basa en la hipótesis de un ruido aditivo y gaussiano circular.
Redes de neuronas Se han desarrollado otros métodos en torno a redes de neuronas para estimar un reducido número de fuentes presentes. Estos métodos exigen una estructura en la matriz de covarianza del ruido y presentan una complejidad de implementación bastante importante.
Filtrado de Wiener
Se han propuesto también unos métodos basados en el filtro multietapa de Wiener [3]. Estos permiten evitar la fase de cálculo de la matriz de covarianza de la señal así como la descomposición en valores propios. Se considera que el ruido aditivo es un ruido blanco y que las fuentes las genera un filtro de tres coeficientes y son incidentes a una red lineal equiespaciada. La prueba de detección del número de fuentes utiliza por tanto esta estructura. En la práctica, no se conoce la difusión temporal de las fuentes y el ruido no tiene necesariamente una estructura blanca. Otros métodos consideran que el ruido es gaussiano y está espacialmente correlacionado, dos hipótesis que no se verifican necesariamente en una situación real.
El método empírico descrito en [4] se basa en la modelización del decrecimiento exponencial de los valores propios de ruido, esto es en la que p es el número de valores propios de ruido, (∀1 #... #∀N) son los valores propios de la matriz de covarianza y K es el número de observaciones utilizadas para estimar la matriz de covarianza. La prueba de decisión ruido o señal es entonces la siguiente:
Este método, a pesar de su eficacia presenta el inconveniente de no funcionar cuando el número de observaciones utilizadas para estimar la matriz de covarianza tiende hacia el infinito. Supone una estructura blanca del ruido y solo funciona, por lo tanto, en presencia de ruido correlacionado y coloreado.
También se conoce de la técnica anterior el documento de KRITCHMAN S. y otros: "Nonparametric detection of the number of signals and random matrix theor y ", SIGNALS, SYSTEMS AND COMPUTERS, 2008, 42, ND ASILOMAR CONFERENCE ON, IEEE, PISCATAWAY, NL, USA, 26 de octubre de 2008 () , páginas 1.680-1.683, XP031475587-ISBN 978-1-4244-2940-0. Y el de CHEN W. y otros: "Detection of the number of signals: a predicted eignethreshold approach", IEEE TRANSACTIONS ON SIGNAL PROCESSING, IEEE SERVICE CENTER, NEW YORK, NY, US LNDK-DOI: 10.1109/78.80959, vol. 39, n.° 5, 1 de mayo de 1991 () , páginas 1.088-1.098; XP002506761 ISSN 1053-587X.
Desde un punto de vista general el objetivo técnico es estimar el número M de componentes de la siguiente... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de determinación del número de fuentes incidentes en una red que comprende C sensores (4i) que reciben N observaciones y un receptor (3) adaptado caracterizado porque comprende al menos las siguientes etapas:
Etapa 1: Calcular la matriz B de dimensión NxN observada en N componentes y obtenida a partir de una señal
o datos recibida (os) en C sensores de observación:
en la que rk vector de dimensión Nx1 es una transformación más o menos lineal de la observación xk recibida en los C sensores. Etapa 2: Calcular los valores propios {∀1, …, ∀N} de la matriz B. Etapa 3: Clasificar los valores propios de la matriz B de la señal para obtener ∀1 #... #∀N e inicialización del número de fuentes recibidas en M = Mmax, se puede considerar Mmax igual a N/2 por ejemplo.
Etapa 4.0: Inicialización de i en i = M+1. Etapa 4.1: i = i-1. Etapa 4.2: Calcular la media y de la desviación estándar de los valores propios de ruido.
→ Calcular la media de los N-i valores propios más pequeños de la matriz B: 20
→ Calcular la desviación estándar de los N-i valores propios más pequeños de la matriz B:
Etapa 4.3: Si ∀i > ∀med + ησ, entonces este valor propio pertenece al espacio señal y el número de fuentes presentes en la mezcla es igual a i, en la que η es un umbral que permite controlar la probabilidad de falsa alarma.
Etapa 4.4: Si ∀i < ∀med + ησ, este valor propio pertenece al espacio ruido, volver a la etapa 4.1.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque se ordenan los valores propios de la matriz por orden decreciente.
3. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque la matriz B es el valor estimado de la matriz de covarianza de la observación:
x (t) es la señal recibida en la red de sensores, vector de tamaño C, y x (tk) es la señal recibida para el instante tk.
4. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque la matriz B es el valor estimado de la matriz de covarianza espacio-temporal de la observación:
rk = xf (tk) es un vector de observación que contiene L desviaciones temporales diferentes de la observación x (t) definida por la ecuación (3) :
en la que sm (t) y sm (fm, t) son las entrada/salida de un filtro de banda finita centrado en fm.
5. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque en el caso de que la matriz B no sea de rango pleno, el procedimiento considera los R valores propios no nulos de la matriz de covarianza.
6. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque la matriz B es una estimación de la matriz de los intercumulantes de orden 2q de las señales para K observaciones del vector x (tk) de dimensión Cx1 y porque el procedimiento comprende una etapa de estimación de la dimensión del espacio señal de la matriz de estadísticas considerada, la cual corresponde al número de fuentes cuando estas son independientes al utilizar el siguiente modelo señal:
en la que P es el número de fuentes presentes. Sabiendo que xn (t) es la n-ésima componente de x (t) , el intercumulante viene definido por:
para 1 ∃ iq ∃ C y en la que cum (.) designa el cumulante,
los intercumulantes estimados en K muestras se ordenan a continuación en la matriz B = xx de la siguiente manera:
en la que ĉx (i1, ..., i2q) es una estimada en K muestras de cumx (i1, ..., i2q) , xx se escribe:
en la que A = [a (θ1) ... a (θP) ] es la matriz de los vectores directores para los diferentes trayectos indizados por p y en la que % designa el producto de Kronecker y ss,
nn son respectivamente las matrices compuestas por los intercumulantes de orden 2q de la señal fuente s (t) y del ruido aditivo n (t) .
7. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque comprende al menos las siguientes etapas:
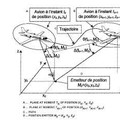
efectuar unas mediciones a lo largo del tiempo de un conjunto de parámetros característicos de los emisores, caracterizándose las mediciones por los vectores ζk para 1 ∃ k ∃K, estando compuestos los vectores ζk por el azimut θk y la relación entre señal y ruido SNRk de uno de los emisores en el instante tk:
ζk = [θk SNRk]T o por el vector director a (θk) de una de las fuentes siendo su relación entre señal y ruido: ζk = [a (θk) T SNRk]T;
a partir de construir una observación f ( ) ; a continuación, construir la siguiente observación:
que obedece a la ecuación (1) , con la signatura am = f (ζm) % f (ζm) estimar el número M de clústeres a partir de los valores propios de la siguiente matriz de covarianza:
8. Procedimiento de acuerdo con la reivindicación 7, caracterizado porque para un sistema de goniometría que
genera unos valores de azimuts θk a lo largo del tiempo, el procedimiento construye = [θkSNRk]T y efectúa la siguiente transformación no lineal:
9. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el valor de umbral está fijado entre 2 y 6.
10. Sistema para determinar el número de fuentes incidentes en una red que comprende C sensores (4i) que reciben
N observaciones, caracterizado porque comprende al menos un receptor (3) que comprende un procesador adaptado para ejecutar las etapas del procedimiento de acuerdo con una de las reivindicaciones 1 a 9.
Patentes similares o relacionadas:
 Estimación de dirección de llegada usando señales de audio con marca de agua y disposiciones ordenadas de micrófono, del 2 de Febrero de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: aparato para proveer información de dirección en base a una señal de audio (awm) reproducida con una marca de agua incrustada, que comprende:
un procesador […]
Estimación de dirección de llegada usando señales de audio con marca de agua y disposiciones ordenadas de micrófono, del 2 de Febrero de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: aparato para proveer información de dirección en base a una señal de audio (awm) reproducida con una marca de agua incrustada, que comprende:
un procesador […]
 Procedimiento de localización de uno o de varios emisores, del 9 de Abril de 2013, de THALES: Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento […]
Procedimiento de localización de uno o de varios emisores, del 9 de Abril de 2013, de THALES: Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento […]
 CINEMÓMETRO SONORO, del 12 de Marzo de 2012, de UNIVERSIDAD MIGUEL HERNANDEZ DE ELCHE: Cinemómetro sonoro.
La invención hace referencia a un cinemómetro sonoro para determinar velocidades en vehículos, que hace uso de una antena […]
CINEMÓMETRO SONORO, del 12 de Marzo de 2012, de UNIVERSIDAD MIGUEL HERNANDEZ DE ELCHE: Cinemómetro sonoro.
La invención hace referencia a un cinemómetro sonoro para determinar velocidades en vehículos, que hace uso de una antena […]
DISPOSITIVO SENSORIAL BASADO EN ULTRASONIDOS PARA MEDIR COORDENADAS DE OBJETOS, EN PARTICULAR, DE HALLAZGOS EN EXCAVACIONES PALEO-ARQUEOLOGICAS., del 1 de Julio de 2006, de CONSEJO SUP. DE INVEST. CIENTIFICAS UNIVERSIDAD ROVIRA I VIRGILI: Dispositivo sensorial basado en ultrasonidos para medir coordenadas de objetos, en particular, de hallazgos en excavaciones paleo-arqueológicas. Consiste en un sistema sensorial […]
SISTEMA AUTOMATIZADO DE SEGUIMIENTO DE UNIDADES DE PIEZAS DE MADERA., del 1 de Octubre de 2002, de AMAN, JAMES A. HALLER, WILLIAM R.: EN LA CARRETILLA ELEVADORA , LOS CONJUNTOS DE CELULAS DE CARGA (40A Y 40B) SE FIJAN A LOS BRAZOS DE LA HORQUILLA (32A Y 32B) Y SON CAPACES […]
SISTEMA DE LOCALIZACION DE CETACEOS POR SONAR PASIVO PARA EVITAR, del 1 de Abril de 2002, de ANDRE,MICHEL: WACS: Whale Anti-Collision System (Sistema de sonar pasivo para evitar colisiones con cetáceos) Consiste en un sistema permanente de localización pasiva […]
SONAR CILINDRICO DESPLEGABLE, del 1 de Marzo de 1992, de THOMSON-CSF: EL INVENTO TRATA DE UN SONAR QUE TIENE BRAZOS DESPLEGABLES PROVISTOS DE COLUMNAS REPARTIDAS SOBRE UNA SUPERFICIE CILINDRICA, CADA COLUMNA ES DOBLE ESTANDO […]
PROCEDIMIENTO DE DETERMINACIÓN DE LA DIRECCIÓN PARA DETECTAR Y RASTREAR ÁNGULOS DE MARCACIÓN SUCESIVOS, del 30 de Enero de 2012, de ATLAS ELEKTRONIK GMBH: Procedimiento de determinación de la dirección para detectar y rastrear ángulos de marcación (Θ) sucesivos de objetivos emisores de sonido a través de todo el […]