Procedimiento para generar rutas de localizador que jalonan la puntería.
Procedimiento para generar rutas de localización que jalonan la puntería,
para varios objetivos que emiten ondassonoras, los cuales se localizan en una zona marítima, por varios sensores que presentan antenas receptoras hidroacústicas,en el que por cada sensor, para cada objetivo detectado, se suministra una ruta de sensor que se componede localizaciones sucesivas cronológicamente, y rutas de sensor de varios sensores que proceden de un objetivocomún, se fusionan en rutas de contactos que tan sólo contienen localizaciones del objetivo común, caracterizadoporque la fusión de las rutas de sensor se efectúa partiendo de rutas de sensor del sensor más preciso en una fusiónsecuencial ruta a ruta, se comprueban rutas de contacto desplazadas unas respecto a otras en el tiempo, encuanto a la probabilidad de su continuidad, y para ello a intervalos predeterminados de tiempo, todas las rutas decontacto existentes en un momento ta actual, se localizan como rutas (NT) nuevas de contacto, y todas las rutas decontacto cuyo final de ruta está situado antes del momento ta actual, como rutas (OT) viejas de contacto, y todas lasrutas nuevas y viejas de contacto se comprueban unas con otras por pares, mediante cálculo de costes, en cuanto apertenencia, de modo que con todas las j nuevas rutas de contacto encontradas en el momento ta actual, y las iviejas rutas de contacto, se establece una matriz de costes partida en dos, con una parte de asignación y una partede no asignación, en cuya parte de asignación se anotan los costes Ci, j de la asignación recíproca de las j nuevas yde las i viejas rutas de contacto, y en cuya parte de no asignación, los costes Cn de la no asignación de las i viejasrutas (OT) de contacto, y se determinan aquellos elementos de la matriz cuyos costes totalizados den como resultadoun mínimo; y porque las nuevas y viejas rutas de contacto de los apareamientos de rutas de contacto definidospor los elementos determinados de la matriz, se asignan unas a otras como rutas de contacto desplazadas en eltiempo, con alta probabilidad de una continuidad, y las rutas de contacto asignadas una a otras se identifican comorutas de objetivo sin interrupción.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/001887.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRÜCKER HEERSTRASSE 235 28309 BREMEN ALEMANIA.
Inventor/es: STEIMEL, ULRICH, MEYER, RALF, FRITSCH, RAINER, Hurka,Jörg, Dr, VOLKMER,FRANK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/802 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › Sistemas para determinar la dirección o la desviación respecto a una dirección predeterminada.
- G01S3/808 G01S 3/00 […] › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
PDF original: ES-2400400_T3.pdf
Fragmento de la descripción:
Procedimiento para generar rutas de localización que jalonan la puntería La invención se refiere a un procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondas sonoras, los cuales se localizan en una zona marítima, por varios sensores que presentan antenas receptoras hidroacústicas, según el preámbulo de la reivindicación 1.
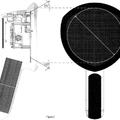
En la técnica del sonar, para el reconocimiento pasivo de objetivos de una zona marítima, se emplean habitualmente por un vehículo portador, por ejemplo, un submarino o un navío de superficie, sensores de diversos tipos que detectan los objetivos en el agua mediante su radiación acústica, y persiguen los objetivos detectados hasta la pérdida del objetivo, y suministran datos más o menos exactos del objetivo. (L. Kühle “Classification and Identification -CAIby Submarine Sonars”, Naval Forces, Nov. 1987, pág. 27 – 31) . Por un sensor se entiende aquí una antena receptora hidroacústica, llamada también antena submarina, como por ejemplo, una base cilíndrica (Cylindrical Array Sonar CAS) , una antena lateral (Flank Array Sonar FAS) una antena colgante (Towed Array Sonar TAS) , así como sus algoritmos montados a continuación para el procesamiento de las señales, como detección de banda ancha (Broadband Detection BDT) , Demon y Lofar. Sensores en el sentido aquí utilizado, son pues CAS BDT, FAS BDT, que suministran localizaciones para objetivos, CAS Demon, FAS Demon, TAS Demon, FAS Lofar y TAS Lofar que suministran líneas de respuesta de frecuencia, de los objetivos. De los sensores empleados, algunos sensores registran todos los objetivos, y algunos sensores solamente una parte de los objetivos, por ejemplo, a causa de la gama de frecuencias predeterminada por la configuración correspondiente de la antena receptora, y por las diferentes coberturas que la acompañan, o a causa de las diferentes condiciones de propagación del sonido en función de la profundidad. Las localizaciones suministradas por los sensores CAS BDT, FAS BDT, TAS BDT, se representan habitualmente en orden cronológico para cada objetivo y para cada sensor, y se ofrece al sirviente del sonar en una llamada representación en cascada, en la que el eje de tiempo al que están referidas las localizaciones, discurre vertical, y en el margen superior de la figura están indicadas siempre las localizaciones más recientes. En el caso de un procesamiento y representación semejantes de los datos de los sensores, como trazas de localización suministradas por cada sensor para cada objetivo localizado por él, a continuación llamadas rutas de sensor, el sirviente tiene que perseguir continuamente una multitud de rutas de sensor. En especial en caso de rutas de sensor que se cruzan, o de rutas de sensor interrumpidas temporalmente, para el sirviente es difícil, hasta casi imposible, decidir si la ruta de sensor que se continúa después de la interrupción o del cruzamiento, persigue el mismo objetivo, o el sensor se ha fijado en otro objetivo.
En un procedimiento conocido para generar rutas de localización que jalonan la puntería, de una multitud de objetivos que emiten ondas sonoras, localizados por varios sensores en una zona marítima (MCINTYRE C M ET AL: “Data association in passive acoustic tracking”, PROCEEDING OF THE SPIE - THE INTERNATIONAL SOCIETY FOR OPTICAL ENGINEERING USA, Tomo 1954, 1993, páginas 376-385, XP002486023, ISSN: 0277-786X) , por cada sensor, para cada objetivo detectado, se suministra una ruta de sensor que se compone de las localizaciones sucesivas cronológicamente. Rutas de sensor de varios sensores que proceden de uno y el mismo objetivo, se fusionan en rutas de contacto que tan sólo contienen localizaciones del objetivo común. Los rutas de contacto que se pueden presentar en distintos tiempos, se representan en una pantalla, y se proveen con un “Contact ícon” y con una “Numeric Designation”, para permitir al operador una asignación.
En un procedimiento conocido para la correlación y fusión de rutas de sensor, para la aplicación en sistemas de rastreo de puntería múltiple con varios sensores (BLACKMAN S S: “Chapter 13: The use of multiple sensors for multiple-target Tracking”, 1986, MULTIPLE-TARGET TRACKING WITH RADAR APPLICATIONS, DEDHAM, AR-TECH HOUSE INC. US, páginas 357-396, XP0022486025, figura 13-5) , partiendo del sensor más preciso como primer sensor, se fusionan en rutas de contacto, las rutas de sensor que son suministradas al mismo tiempo por los sensores, mediante una fusión sucesiva ruta a ruta. Aquí se inscriben todas las rutas de sensor de los sensores, una tras otra, en un fichero central de rutas, y cada una de las rutas de sensor inscritas a continuación, se comprueba en cuanto a pertenencia a un objetivo común, y en su caso se fusiona, con la ruta de sensor ya comprobada en cuanto a pertenencia. Aquí no está prevista una asignación de rutas de sensor que se presenten desplazadas en el tiempo.
En un procedimiento para la asociación de segmentos de rutas desplazados en el tiempo, en el caso de localización múltiple de objetivos con varios sensores (YEOM S-W. ET AL.: Improving track continuity using track segment association”, AEROSPACE CONFERENCE, 2003, PROCEEDINGS 2003 IEEE MARCH 8-15, 2003, PISCATAWAY, NJ, USA, IEEE, tomo 4, 8. Marzo 2003 (2003-03-08) , páginas 4_1925-4_1941, XP010660418, ISBN: 978-0-7803-76519) se comprueban rutas desplazadas unas respecto a otras en el tiempo, mediante función de costes, en cuanto a pertenencia, y se asignan unas tras otras, rutas con alta probabilidad de una pertenencia común.
La misión de la invención se basa en facilitar un procedimiento para generar rutas de localización que jalonan la puntería, o trazas de localización que jalonan la puntería, el cual sólo genera tantas rutas de localización que jalonan la puntería, como objetivos son detectados por la totalidad de los sensores, y que asigna mutuamente en forma cronológicamente correcta, trozos de ruta que jalonan uno y el mismo objetivo.
La misión se resuelve según la invención, mediante las notas características de la reivindicación 1.
El procedimiento según la invención tiene la ventaja de que mediante la fusión de las rutas de sensor en rutas de contacto, se consigue una reducción de las trazas de localización o rutas de localización, tan sólo a aquellas rutas de localización, cada una de las cuales resulta de uno y el mismo objetivo detectado -con independencia de por qué sensores fue perseguido este objetivo. Puesto que con esto se reduce claramente el número de las trazas de localización, el sirviente del sonar se descarga muy Intensamente, durante el control del objetivo, persecución del objetivo y selección del objetivo. La pantalla observada por el sirviente, en la que se representan exclusivamente rutas de contacto, y rutas de objetivos, de preferencia, de diferente coloración, se hace para el sirviente más inteligible de una sola ojeada, y se pueden volver a encontrar con facilidad por el sirviente, objetivos individuales, incluso después de pausas más largas de observación, situadas en la gama de unos minutos.
Además, el procedimiento según la invención ofrece notables ventajas para la elaboración de la posición en una zona marítima, mediante la llamada función TMA (Target Motion Analysis) , en la que a partir de localizaciones determinadas pasivamente, se estiman como datos del objetivo, las posiciones de objetivos, así como su dirección de movimiento y la velocidad del movimiento. Puesto que el procedimiento según la invención efectúa una asignación eficaz de rutas de contacto que terminan y reaparecen temporalmente más tarde, y que representan las localizaciones de uno y el mismo objetivo, la función TMA se puede aplicar tanto en localizaciones de las rutas de contacto que terminan, como también en localizaciones de las rutas de contacto que reaparecen. En especial para la estimación de los datos del objetivo, se puede recurrir a localizaciones del mismo objetivo, que se tienen antes de una maniobra propia del vehículo portador, de manera que se dispone de localizaciones de dos recorridos atravesados por el vehículo portador. Gracias al recurso a localizaciones del mismo objetivo, procedentes de tiempos de medida situados también muy atrás en el pasado, se pueden obtener en un tiempo mucho más corto, estimaciones fiables de la posición del objetivo, de la velocidad del objetivo, y de la dirección de marcha, puesto que entonces la función TMA, junto con las localizaciones actuales, converge con mucha más rapidez. Para la función TMA, remítase a los documentos DE 101 29 726 A1 y DE 103 52 738 A1.
Mediante la asignación o reunión de rutas correspondientes de contacto, y la... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondas sonoras, los cuales se localizan en una zona marítima, por varios sensores que presentan antenas receptoras hidroacústicas, en el que por cada sensor, para cada objetivo detectado, se suministra una ruta de sensor que se compone de localizaciones sucesivas cronológicamente, y rutas de sensor de varios sensores que proceden de un objetivo común, se fusionan en rutas de contactos que tan sólo contienen localizaciones del objetivo común, caracterizado porque la fusión de las rutas de sensor se efectúa partiendo de rutas de sensor del sensor más preciso en una fusión secuencial ruta a ruta, se comprueban rutas de contacto desplazadas unas respecto a otras en el tiempo, en cuanto a la probabilidad de su continuidad, y para ello a intervalos predeterminados de tiempo, todas las rutas de contacto existentes en un momento ta actual, se localizan como rutas (NT) nuevas de contacto, y todas las rutas de contacto cuyo final de ruta está situado antes del momento ta actual, como rutas (OT) viejas de contacto, y todas las rutas nuevas y viejas de contacto se comprueban unas con otras por pares, mediante cálculo de costes, en cuanto a pertenencia, de modo que con todas las j nuevas rutas de contacto encontradas en el momento ta actual, y las i viejas rutas de contacto, se establece una matriz de costes partida en dos, con una parte de asignación y una parte de no asignación, en cuya parte de asignación se anotan los costes Ci, j de la asignación recíproca de las j nuevas y de las i viejas rutas de contacto, y en cuya parte de no asignación, los costes Cn de la no asignación de las i viejas rutas (OT) de contacto, y se determinan aquellos elementos de la matriz cuyos costes totalizados den como resultado un mínimo; y porque las nuevas y viejas rutas de contacto de los apareamientos de rutas de contacto definidos por los elementos determinados de la matriz, se asignan unas a otras como rutas de contacto desplazadas en el tiempo, con alta probabilidad de una continuidad, y las rutas de contacto asignadas una a otras se identifican como rutas de objetivo sin interrupción.
2. Procedimiento según la reivindicación 1, caracterizado porque para el cálculo de costes, para todas las nuevas rutas (NT) de contacto encontradas, se retroceden localizaciones para los vacíos temporales entre el momento de su comienzo y el momento del final de las viejas rutas (OT) de contacto, y para todas las viejas rutas (OT) de contacto encontradas, se predicen localizaciones para los vacíos temporales entre el momento de su final y el momento del comienzo de las nuevas rutas (NT) de contacto, porque se calculan los costes de asignación para un momento tk, a partir de la diferencia entre las localizaciones Bprä, Bretro predichas y retrocedidas para este momento tk, y sus desviaciones estándar (Bprä, (Bretro de las rutas de contacto de un apareamiento de rutas de contacto, según
3. Procedimiento según la reivindicación 2, caracterizado porque se calculan los costes de asignación para un momento t1 que está determinado por el final temporal de la vieja ruta (OT) de contacto, para un momento tNprä que está determinado por el comienzo de la nueva ruta (NT) de contacto, y para un momento tNprä / 2 que está determinado por la mitad de la diferencia temporal entre el final de la vieja ruta de contacto, y el comienzo tNprä de la nueva, y porque para la anotación de los costes en la parte de asignación de la matriz de costes, se promedia la suma de los costes calculados de asignación.
4. Procedimiento según la reivindicación 1, caracterizado porque, para el cálculo de costes para todas las nuevas rutas (NT) encontradas de contacto, se retroceden para los vacíos temporales entre los momentos de su comienzo y el momento del final de las viejas rutas (OT) de contacto, valores de la relación señal – ruido (valores SNR) , y para todas las viejas rutas (OT) encontradas de contacto, se predicen para los vacíos temporales entre el momento de de su final y el momento del comienzo de las nuevas rutas (NT) de contacto, valores SNR, porque los costes Cki, j de asignación para un momento tk se calculan a partir de la diferencia entre los valores SNR (SNRprä y SNRretro) predichos y retrocedidos para este momento, y de sus desviaciones estándar (SNRprä, (SNRretro de las rutas de contacto de un apareamiento de rutas de contacto, según
5. Procedimiento según la reivindicación 2 ó 4, caracterizado porque los costes de asignación se calculan para una multitud de momentos tk de preferencia equidistantes, entre el final t1 de la vieja ruta (OT) de contacto, y el comienzo tNprä de la nueva ruta (NT) de contacto, y para la inscripción de costes en la parte de asignación de costes, se promedia la suma de los costes calculados de asignación, según
6. Procedimiento según la reivindicación 1, caracterizado porque, para el cálculo de costes para todas las nuevas rutas (NT) de contacto encontradas, para los vacíos temporales entre el momento de su comienzo y el momento del final de la vieja ruta (OT) de contacto, se retroceden cuotas de localización, y para todas las viejas rutas (OT) de
contacto encontradas, para los vacíos temporales entre el momento de su final y el momento del comienzo de la nueva ruta (NT) de contacto, se predicen cuotas de localización, porque se calculan los costes de asignación para un momento tk a partir de la diferencia entre las cuotas BRprä, BRretro de localización predichas y retrocedidas, y de sus desviaciones estándar (BRprä, (BRretro de las rutas de contacto de un apareamiento de rutas de contacto, según
7. Procedimiento según la reivindicación 4 ó 6, caracterizado porque se calculan los costes de asignación para un momento t1 que está determinado por el final temporal de la vieja ruta (OT) de contacto, y para un momento tNprä que está determinado por el comienzo de la nueva ruta (NT) de contacto, y para la anotación de costes en la parte de asignación de la matriz de costes, se promedia la suma de los costes calculados de asignación.
8. Procedimiento según una de las reivindicaciones 2 a 7, caracterizado porque, antes del retroceso de las localizaciones o de las cuotas de localización o de los valores SNR, en los vacíos temporales, se alisan las nuevas rutas (NT) de contacto mediante un alisado dirigido hacia atrás, de preferencia según el método Rauch-Tung-Striebel.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado porque los costes de asignación para un apareamiento de rutas de contacto, de una ruta nueva de contacto y de una vieja, se agregan con un valor máximo arbitrariamente redeterminado, cuando la diferencia temporal entre el comienzo de la nueva ruta NTj de contacto, y el final de la vieja ruta (OT) de contacto, es mayor que un valor predeterminado, por ejemplo, 10 minutos.
10. Procedimiento según la reivindicación 1, caracterizado porque para el cálculo de costes de asignación para todas las rutas (NT) nuevas y viejas encontradas, se buscan sus líneas de respuesta de frecuencia asignadas como atributos, y porque los costes de asignación se calculan a partir de la diferencia de frecuencias de las líneas FLOT, FLNT de respuesta de frecuencia, y de su desviación estándar (FLOT, ( FLNT de las rutas de contacto de un apareamiento de rutas de contacto, según
11. Procedimiento según la reivindicación 10, caracterizado porque, en caso de un número igual de líneas de respuesta de frecuencia de las rutas de contacto de los apareamientos de rutas de contacto, para la anotación de costes en la parte de asignación de la matriz de costes, se divide la suma de los costes de asignación calculados para todas las k líneas de respuesta de frecuencia con k=1, 2, … NFL, por el número NFL de las líneas de respuesta de frecuencia asignadas a una ruta de contacto, según
12. Procedimiento según la reivindicación 11, caracterizado porque, en caso de un número desigual de líneas de respuesta de frecuencia de las rutas de contacto, se calculan los costes de asignación solamente para aquellos apareamientos de rutas de contacto de viejas y nuevas rutas de contacto, en los que se presentan pares de líneas de respuesta de frecuencia con una diferencia de frecuencias menor respecto a un valor predeterminado, y porque para la anotación de costes en la parte de asignación de la matriz de costes, se divide la suma de los costes de asignación calculados para todos los k pares 1, 2 … NPaare de líneas de respuesta de frecuencia, por el número NPaare elevado al cuadrado, de los pares de líneas de respuesta de frecuencia, según
y porque para apareamientos de rutas de contacto que no presenten tales pares de líneas de respuesta de frecuencia, la anotación de costes se pone en la parte de asignación de la matriz de costes, en un máximo arbitrario.
13. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado porque la anotación de costes en la parte de no asignación de la matriz de costes, se predetermina igual para todas las rutas de contacto.
14. Procedimiento según una de las reivindicaciones 1 a 13, caracterizado porque la fusión secuencial ruta a ruta se realiza de forma que todas las rutas de sensor del sensor más preciso, se inscriben en un fichero central de rutas como rutas centralizadas, porque las rutas de sensor de un segundo sensor se comprueban en momentos sucesivos, con las rutas centralizadas, en cuanto a su asignación a un objetivo común, y en caso de una probabilidad suficientemente elevada de la asignación, se asigna a la respectiva ruta centralizada, y se fusiona con esta, porque el fichero de rutas se actualiza sobrescribiendo con las rutas fusionadas e inscribiendo las rutas de sensor no asignadas del otro sensor, y porque las etapas precitadas del procedimiento, se repiten con las rutas centralizadas del
respectivo fichero actualizado de rutas y con las rutas de sensor de cada uno de los demás sensores, hasta que todas las rutas de sensor estén contenidas como rutas centralizadas en el fichero actualizado de rutas, y porque las rutas centralizadas existentes en el fichero de rutas finalmente actualizado, se emiten como rutas de contacto.
15. Procedimiento según la reivindicación 14, caracterizado porque para la comprobación de la probabilidad de asignación, y para la asignación, de rutas centralizadas y de rutas de sensor de un sensor, se utiliza el Global-NearestNeighbor-Methode, GNN-Methode.
16. Procedimiento según la reivindicación 15, caracterizado porque con las i rutas centralizadas del fichero central actualizado de rutas, y las j rutas de sensor de un sensor cualquiera, se establece una matriz de costes partida en dos, con una parte de asignación y una parte de no asignación, en cuya parte de asignación se anotan los costes de la asignación recíproca de las i rutas centralizadas y de las j rutas de sensor, y en la parte de no asignación, los costes de la no asignación de las i rutas centralizadas, porque se determinan aquellos elementos de la matriz, cuyos costes totalizados den por resultado un mínimo, y porque se asignan una a otras, las rutas centralizadas y rutas de sensor de los apareamientos de rutas definidos por los elementos determinados de la matriz.
17. Procedimiento según la reivindicación 16, caracterizado porque los costes Ci, j de asignación se calculan para el momento tk, como suma de los cuadrados de las distancias estadísticas normalizadas de las localizaciones y, de preferencia adicionalmente, de las cuotas de localización, según
estando A para el fichero central de rutas, y B para un sensor cualquiera, designando 0,
la localización y la cuota de localización, y ( las correspondientes desviaciones estándar, a se selecciona con cero o “1”, y la adición se efectúa a lo largo de una ventana flotante de tiempo de longitud b1.
18. Procedimiento según la reivindicación 16 ó 17, caracterizado porque los costes para la no asignación de las i rutas centralizadas del fichero central actualizado de rutas se predeterminan iguales para todas las i rutas centralizadas.
19. Procedimiento según una de las reivindicaciones 16 a 18, caracterizado porque la fusión de una ruta de sensor con una ruta centralizada asignada, se realiza por adición convexa.
20. Procedimiento según una de las reivindicaciones 1 a 19, caracterizado porque el coste mínimo se determina mediante el algoritmo de subasta, o según el método JVC (Jonker Vogelnant Castañon) .
21. Procedimiento según una de las reivindicaciones 1 a 20, caracterizado porque se visualizan todas las rutas de contacto y rutas de objetivo.
22. Procedimiento según la reivindicación 21, caracterizado porque en la visualización de las rutas de objetivo, se rellenan los vacíos temporales entre las rutas de contacto pertenecientes a una ruta de objetivo, mediante una línea que une una con otra las rutas de contacto.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO., del 16 de Marzo de 2007, de STN ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo por recepción selectiva en dirección de ondas acústicas que son irradiadas o emitidas […]
PROCEDIMIENTO PARA DETERMINAR LA POSICION DE UN BLANCO QUE IRRADIA SONIDO., del 16 de Junio de 2005, de STN ATLAS ELEKTRONIK GMBH: Procedimiento para determinar la posición de un blanco que irradia sonido hacia el agua evaluando el sonido irradiado por el blanco, el cual es recibido […]
 PROCEDIMIENTO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO, del 1 de Mayo de 2008, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo por recepción selectiva en dirección de ondas sonoras que son irradiadas o emitidas […]
PROCEDIMIENTO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO, del 1 de Mayo de 2008, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo por recepción selectiva en dirección de ondas sonoras que son irradiadas o emitidas […]
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo, del 12 de Febrero de 2014, de ATLAS ELEKTRONIK GMBH: Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos de marcación medidos en diferentes momentos, que […]
 Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Sistemas y métodos para desambiguar posiciones de un tirador, del 23 de Mayo de 2012, de Raytheon BBN Technologies Corp: Un método para determinar una trayectoria del proyectil no ambigua utilizando una matriz de sensores acústicosseparados cuando una […]
MÉTODO PARA IDENTIFICAR UN REBUFO, del 2 de Marzo de 2012, de Raytheon BBN Technologies Corp: Un método para identificar una señal de rebufo dentro de una señal generada por una matriz de sensores acústicos que forman una antena, que comprende: definir […]