PROCEDIMIENTO PARA DETERMINAR LA POSICIÓN MOMENTÁNEA DE UNA SECCIÓN ACÚSTICA DE UNA ANTENA REMOLCADA.
Procedimiento para la determinación de la posición momentánea de una sección (111) acústica remolcada a una profundidad (Δ
Z) de remolque elegida de una antena (11) remolcada en el agua con la longitud (L) extendida por un vehículo (10) remolcador, caracterizado porque la posición de la sección (111) acústica se determina en al menos un lugar elegido de la sección (111) acústica y porque la posición del lugar elegido es estimada después de un trayecto (19) definido recorrido por el vehículo (10) remolcador a lo largo de su trayectoria (17) por medio de un modelo basado en las posiciones ocupadas por el vehículo (10) remolcador y por el lugar elegido y en la posición del vehículo (10) remolcador al final del trayecto (19) teniendo en cuenta la longitud (L) extendida de la antena (11) remolcada y la profundidad (ΔZ) de remolque de la sección (111) acústica
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/001348.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRÜCKER HEERSTRASSE 235 28309 BREMEN ALEMANIA.
Inventor/es: STEINER, HANS-JOACHIM.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Febrero de 2007.
Clasificación Internacional de Patentes:
- G01V1/38C
Clasificación PCT:
- G01V1/38 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 1/00 Sismología; Prospección o detección sísmica o acústica. › especialmente adaptado a las zonas recubiertas de agua (G01V 1/28 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2358762_T3.pdf


Fragmento de la descripción:
El invento se refiere a un procedimiento para determinar la posición momentánea de una sección acústica remolcada a una profundidad de remolque elegida de una antena remolcada de longitud definida remolcada en el agua por un vehículo de remolcador.
Las antenas remolcadas con una sección acústica acústicamente sensitiva, que se compone de una pluralidad de convertidores electroacústicos dispuestos distanciados uno detrás de otro en el sentido longitudinal de la antena son utilizadas para la localización de objetos subacuáticos, que emiten sonido y que reflejan el sonido. La antena remolcada es remolcada por un vehículo remolcador. Durante el funcionamiento de recepción se retardan las señales eléctricas de salida de los convertidores en un sistema electrónico de procesamiento de señales instalado a bordo del vehículo remolcador y se suman sin desplazamiento de fase en señales de grupo de características direccionales. El eje principal de esta característica direccional indica la dirección de localización, es decir la dirección en la que se registra un objeto emisor de sonido o reflector de sonido. El ángulo entre el eje principal de la característica direccional y la normal de la sección acústica se Indica como ángulo de localización.
Para una determinación suficientemente exacta del ángulo de localización es necesario conocer la posición y la orientación de la sección acústica de la antena remolcada. Es posible calcular ambos parámetros, cuando en el instante de la localización se conocen, por ejemplo, las posiciones de los diferentes convertidores de la sección acústica.
En un procedimiento conocido para la determinación de la posición momentánea de los convertidores electroacústicos de la sección acústica de la antena remolcada con relación a la posición del vehículo remolcador (documento DE 196 50 164 A1) se emiten dos señales de transmisión de convertidores de transmisión dispuestos distanciados entre sí a bordo del remolcador, que son recibidas por los convertidores de la sección acústica. Las señales de transmisión son moduladas en frecuencia y se emiten desplazadas en un intervalo de tiempo. Las señales de recepción de los convertidores son desmoduladas. La frecuencia de modulación es comparada con un tono de localización, que se elige en función de la excursión de la frecuencia y de la duración de la señal de transmisión y del intervalo de tiempo. En el caso de igualdad, el convertidor correspondiente se halla sobre el eje longitudinal a la distancia de remolque, mientras de una desviación de la frecuencia es proporcional a la desviación del convertidor con relación al eje longitudinal de la antena remolcada.
El invento se basa en el problema de divulgar un procedimiento para la determinación de la posición momentánea de una sección acústica de una antena remolcada, que suministre datos de posición suficientemente exactos sin un Hardware adicional y con un trabajo de cálculo poco exigente.
El problema se soluciona según el invento con las características de la reivindicación 1.
El procedimiento según el invento tiene la ventaja de que suministra con un trabajo de cálculo reducido y con ello de manera bastante rápida una determinación utilizable en la práctica de la posición momentánea y de la orientación de la sección acústica de la antena remolcada. Para la estimación de la correspondiente posición nueva de la sección acústica después de recorrer una distancia de remolque por el vehículo remolcador sólo es necesario medir la nueva posición ocupada por el vehículo remolcador, que de por sí se registra de manera continua en el vehículo remolcador por razones de navegación, así como tener en cuenta la longitud de la antena remolcada extendida durante el remolque, que se determinó al comienzo del remolque y la profundidad de remolque de la sección acústica. Estas magnitudes, es decir la posición del vehículo, la longitud extendida de la antena remolcada y la profundidad de remolque de la sección acústica, forman los datos de partida del modelo según el invento, que es muy estable frente a oscilaciones cualesquiera de las magnitudes de partida, es decir numéricamente. Las posiciones estimadas con el modelo según el invento y la posición resultante de la sección acústica se orientan en la trayectoria conocida recorrida por el vehículo remolcador y después de una maniobra del rumbo del vehículo remolcador siempre vuelven al rumbo del vehículo remolcador, de manera, que no se puede formar un Offset permanente.
Las formas de ejecución convenientes del procedimiento según el invento con los perfeccionamientos y las configuraciones ventajosas del invento se desprenden de las restantes reivindicaciones.
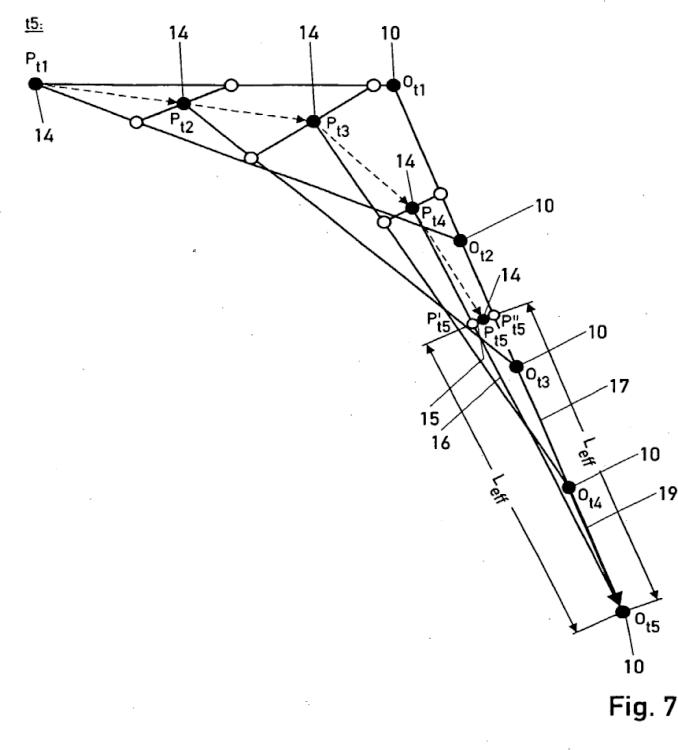
El modelo utilizado según una ejecución preferida del invento para la estimación de la posición local siguiente del lugar elegido a partir de la posición local precedente parte del supuesto de que la nueva posición local ocupada por el lugar elegido de la sección acústica después de una distancia recorrida por el vehículo remolcador, se halla sobre una recta, que une entre sí una primera posición local ficticia y una segunda posición local ficticia, hallándose la primera posición local ficticia sobre la recta de unión de la posición local antigua, ocupada anteriormente por el lugar elegido, y la nueva posición del vehículo y que la segunda posición local ficticia se halla sobre la trayectoria recorrida por el vehículo. La distancia de las dos posiciones locales ficticias a la nueva posición del vehículo equivale entonces a una longitud efectiva de la antena remolcada tendida a lo largo de la recta de unión, respectivamente la trayectoria del vehículo. La longitud efectiva de la antena remolcada se determina a su vez a partir de la longitud de antena remolcada extendida, de la separación del lugar elegido del extremo de la antena y de la profundidad de remolque de la sección acústica.
**(Ver fórmula)**
La situación exacta de la nueva posición local sobre la recta, que une entre sí las dos posiciones locales ficticias es definida ventajosamente por la separación entre la nueva posición local y una de las posiciones locales ficticias. Esta separación es proporcional a la longitud multiplicada con un factor fijo de la recta, que une entre sí las dos posiciones locales ficticias. Este factor es determinado de manera empírica y no varía durante el trayecto de remolque.
El procedimiento según el invento se describe en lo que sigue con detalle por medio de un ejemplo de ejecución representado en el dibujo. En él muestran en representación esquemática:
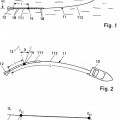
La figura 1, en una vista lateral un vehículo remolcador con una antena remolcada extendida en el agua.
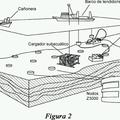
La figura 2, una vista en planta del vehículo remolcador y de la antena remolcada durante una maniobra del rumbo del vehículo remolcador.
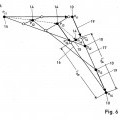
Cada una de las figuras 3 a 7, las posiciones del vehículo remolcador y del centro de gravedad acústico de una sección acústica de la antena remolcada en instantes t1, t2…t5 sucesivos del trayecto de remolque, cuando el vehículo realiza una maniobra del rumbo, con el fin de ilustrar gráficamente el procedimiento.
Para la detección y la localización de objetos subacuáticos emisores de sonidos o reflectores de sonidos se extiende desde un vehículo 10 remolcador, que puede ser un vehículo de superficie o un vehículo submarino y que en la figura 1 se representa como embarcación de superficie, una antena 11 remolcada, que es remolcada por el vehículo 10 remolcador. La construcción y el funcionamiento de las antenas 11 remolcadas son suficientemente conocidos. Su posible construcción se describe por ejemplo en los documentos DE 198 11 335 A1 o DE 195 18 461 A1 o DE 199 09 205 A1. La antena 11 remolcada posee de manera en sí conocida una sección 111 acústica acústicamente sensitiva en la que se alinea uno detrás de otro distanciados en el sentido longitudinal una pluralidad de convertidores 18 electroacústicos y un cable 112 de remolque, que establece una unión mecánica y eléctrica entre la sección 111 acústica y el vehículo 10 remolcador. Los convertidor 18 se simbolizan en la figura 1 medio de puntos dibujados en la sección 111 acústica. En el interior del cable 112 de arrastre, que se construye resistente a tracción, se hallan los cables de alimentación y de señales, no representados aquí, de los convertidores 18 electroacústicos de la sección 111 acústica. En el extremo libre de la antena 11 remolcada se dispone un freno 12 de remolque, que contribuye a... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación de la posición momentánea de una sección (111) acústica remolcada a una profundidad (ΔZ) de remolque elegida de una antena (11) remolcada en el agua con la longitud (L) extendida por un vehículo (10) remolcador, caracterizado porque la posición de la sección (111) acústica se determina en al menos un lugar elegido de la sección (111) acústica y porque la posición del lugar elegido es estimada después de un trayecto (19) definido recorrido por el vehículo (10) remolcador a lo largo de su trayectoria (17) por medio de un modelo basado en las posiciones ocupadas por el vehículo (10) remolcador y por el lugar elegido y en la posición del vehículo (10) remolcador al final del trayecto (19) teniendo en cuenta la longitud (L) extendida de la antena (11) remolcada y la profundidad (ΔZ) de remolque de la sección (111) acústica.
2. Procedimiento según la reivindicación 1, caracterizado porque a partir de las posiciones del lugar elegido al comienzo y al final del trayecto (19) recorrido por el vehículo (10) remolcador se determina la orientación de la sección (111) acústica y se asigna a la posición del lugar elegido al final del trayecto (19).
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque en el modelo se supone, que la nueva posición local ocupada por el lugar elegido de la sección (111) acústica al final del trayecto (19) definido del vehículo (10) remolcador se halla sobre una recta (15), que une entre sí una primera posición (P') local ficticia y una segunda posición (P”) local ficticia, porque la primera posición (P') local ficticia se halla sobre una recta (16) entre la antigua posición (P) local ocupada por el lugar elegido al comienzo del trayecto (19) y la nueva posición (O) del vehículo ocupada al final del trayecto (19) y la segunda posición (P”) local ficticia se halla sobre la trayectoria (17) y que las distancias entre las dos posiciones (P', P”) locales ficticias y la nueva posición (O) del vehículo son siempre iguales a una longitud (Leff) efectiva de la antena (11) remolcada, que a su vez se mide, por un lado, a lo largo de la recta (16) de unión y, por otro, a lo largo de la trayectoria (17).
4. Procedimiento según la reivindicación 3, caracterizado porque la longitud (Leff) efectiva de la antena (11) remolcada se determina a partir de la longitud (L) de la antena (11) remolcada extendida y reducida en la distancia (l) del lugar elegido en la sección (111) acústica al extremo libre de la antena (11) remolcada y de la diferencia de profundidades entre el vehículo (10) remolcador y la profundidad (ΔZ) de remolque prefijada de la sección (111) acústica y la sección (111) acústica.
5. Procedimiento según la reivindicación 3 ó 4, caracterizado porque la separación medida a lo largo de la recta (15) entre la primera y la segunda posición (P', P”) local ficticia y la nueva posición (P) local de la primera o segunda posición (P', P”) local ficticia se determina por medio de la longitud de la recta (15) multiplicada con un factor.
6. Procedimiento según la reivindicación 5, caracterizado porque el factor es una magnitud fija.
7. Procedimiento según la reivindicación 5 ó 6, caracterizado porque el factor es determinado empíricamente.
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado porque como al menos un lugar elegido se recurre al lugar del centro (14) de gravedad acústico de la sección (111) acústica.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado porque la sección (111) acústica posee una pluralidad de convertidores (18) electroacústicos dispuestos distanciados uno detrás de otro en el sentido de remolque y porque como el al menos un lugar elegido de la sección (111) acústica se recurre al lugar de un convertidor (18).
10. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado porque la sección (111) acústica posee una pluralidad de convertidores (18) electroacústicos dispuestos distanciados uno detrás de otro y porque los lugares elegidos son los lugares de todos convertidores (18) de la sección (111) acústica.
Patentes similares o relacionadas:
 PROCEDIMIENTO PARA LA ESTIMACIÓN DE LA GEOMETRÍA DE ANTENA DE UNA ANTENA LINEAL ACÚSTICA, del 26 de Enero de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para la estimación de la geometría de antena de una antena lineal submarina acústica que presenta una pluralidad de hidrófonos alineados uno tras otro a […]
PROCEDIMIENTO PARA LA ESTIMACIÓN DE LA GEOMETRÍA DE ANTENA DE UNA ANTENA LINEAL ACÚSTICA, del 26 de Enero de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para la estimación de la geometría de antena de una antena lineal submarina acústica que presenta una pluralidad de hidrófonos alineados uno tras otro a […]
 METODO Y SISTEMA PARA EL CONTROL DE POSICION DE CABLES EXPLORADORES SISMICOS MARINOS REMOLCADOS, del 10 de Noviembre de 2009, de KONGSBERG SEATEX AS: Un método para controlar la disposición y posición de cables exploradores sísmicos marinos remolcados y su dispersión; dicho método consiste en los pasos […]
METODO Y SISTEMA PARA EL CONTROL DE POSICION DE CABLES EXPLORADORES SISMICOS MARINOS REMOLCADOS, del 10 de Noviembre de 2009, de KONGSBERG SEATEX AS: Un método para controlar la disposición y posición de cables exploradores sísmicos marinos remolcados y su dispersión; dicho método consiste en los pasos […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Sistema de observación in situ multipunto a largo plazo con base en el fondo marino, del 4 de Marzo de 2020, de SHANDONG UNIVERSITY: Un sistema de observación in situ multipunto a largo plazo con base en el fondo marino caracterizado por comprender un marco de plataforma , un material flotante , […]
Dispositivo para controlar la posición de un cable de instrumentado remolcado en agua, del 24 de Julio de 2019, de KONGSBERG SEATEX AS: Un dispositivo de control para controlar la posición de un cable instrumentado remolcado en el agua, como un cable marino sísmico, y/o una batería de cables […]
 Método y aparato para sincronización de relojes subacuáticos usando luz y sonido, del 25 de Junio de 2019, de TrackServer, Inc: Un método para sincronizar dispositivos de reloj esclavos sumergidos a partir de un dispositivo de reloj maestro de modo inalámbrico, que comprende:
transmitir […]
Método y aparato para sincronización de relojes subacuáticos usando luz y sonido, del 25 de Junio de 2019, de TrackServer, Inc: Un método para sincronizar dispositivos de reloj esclavos sumergidos a partir de un dispositivo de reloj maestro de modo inalámbrico, que comprende:
transmitir […]
Bloque de amarres para un deflector, del 6 de Junio de 2019, de Mørenot Offshore AS: Un bloque de amarres para un deflector , incluyendo el bloque de amarres un vástago y un brazo basculante fijados de forma pivotante entre […]
Hidrófonos y sismómetros de fondo de mar, del 20 de Marzo de 2019, de INSTITUT FRANCAIS DE RECHERCHE POUR L'EXPLOITATION DE LA MER (IFREMER): Estación de fondo de mar destinada a efectuar unas mediciones in situ que comprende una estructura portadora de flotabilidad positiva a la […]