Sistemas y métodos para desambiguar posiciones de un tirador.
Un método para determinar una trayectoria del proyectil no ambigua utilizando una matriz de sensores acústicosseparados (22-28) cuando una onda de choque asociada con un proyectil es detectada mediante,
por lo menos,cinco de los sensores, pero un rebufo asociado con el proyectil es detectado mediante menos de cuatro de lossensores, que comprende:
obtener mediciones TDOA de onda de choque desde los sensores que detectan la onda de choque;
caracterizado por:
obtener (302) cuatro o más mediciones de TDOA de la onda de choque desde los sensores que detectan la onda dechoque, en donde las mediciones de TDOA de la onda de choque son insuficientes para calcular la trayectoria noambigua del proyectil;
obtener menos de tres mediciones TDOA del rebufo, desde los sensores que detectan el rebufo; ycalcular iterativamente (308) soluciones a un modelo balístico utilizando las mediciones de TDOA de la onda dechoque y las mediciones de TDOA del rebufo, para obtener la trayectoria no ambigua del proyectil.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10002862.
Solicitante: Raytheon BBN Technologies Corp.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 10 MOULTON STREET CAMBRIDGE, MA 02138 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MILLIGAN,STEPHEN,D, BARGER,JAMES, BRINN,SETH MARSHALL, MULLEN,RICHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41J5/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41J BLANCOS O DIANAS; CAMPOS DE TIRO; COLECTORES DE BALAS. › F41J 5/00 Sistemas indicadores para el tiro al blanco; Sistemas detectores de blancos acertados o indicadores de puntuación. › Sistemas acústicos indicadores de blancos acertados, es decir, que detectan las ondas de choque (F41J 5/056 tiene prioridad).
- G01S3/808 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
- G01S5/22 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/28 tiene prioridad).
PDF original: ES-2385191_T3.pdf
Fragmento de la descripción:
Sistemas y métodos para desambiguar posiciones de un tirador Campo de la invención La presente invención se refiera a con seguridad y tecnologías para la aplicación de la ley, y más en concreto a sistemas para determinar el origen y la dirección de desplazamiento de proyectiles supersónicos. Los métodos y sistemas son capaces de examinar y desambiguar posiciones de un tirador, incluso para grandes distancias entre el tirador y el sensor, y cuando no se recibe señal o solo se recibe una débil señal del sonido de la boca del cañón.
Antecedentes de la invención Se conocen sistemas y métodos que pueden determinar en general la dirección y la trayectoria de proyectiles supersónicos, tales como balas y proyectiles de artillería, mediante medir parámetros asociados con la onda de choque generada por un proyectil. Uno de tales sistemas, descrito en la Patente de EE.UU. Número 5 241 518, incluye al menos tres sensores separados espacialmente, incorporando cada sensor tres transductores acústicos dispuestos en un plano. Los sensores generan señales en respuesta a la onda de choque, que están relacionadas con el acimut y el ángulo de elevación respecto del origen de la onda de choque. Con medidas solo de ondas de choque, es imposible determinar la distancia entre el sensor o los sensores y el origen de la onda de choque. La información de distancia se obtiene típicamente a partir del fogonazo o del rebufo.
El acimut y el ángulo de elevación de un tirador en relación con la localización del sensor, se determinan típicamente midiendo información del Momento de Llegada (TOA, Time of Arrival) de la señal de la boca del cañón y de la señal de la onda de choque, en cada sensor. Cada uno de los sensores encuentra las señales en diferentes momentos, y genera una señal en respuesta a la presión de la boca del cañón y de la onda de choque. Se procesan las señales procedentes de diversos sensores, y puede determinarse una dirección (acimut y elevación) desde el sensor o los sensores al origen de la boca del cañón y la onda de choque, y por lo tanto la trayectoria del proyectil.
Los sistemas convencionales utilizan micrófonos, que pueden estar relativamente próximos (por ejemplo a 1 metro de separación) o ampliamente separados (por ejemplo montados sobre un vehículo, o portados por soldados en un campo de batalla) , y miden la presión de la boca del cañón y la onda de choque de forma omnidireccional en sus respectivas localizaciones. Sin embargo, salvo que los sensores tengan una separación relativamente grande y/o la trayectoria quede dentro de la antena, es muy alta la precisión de sincronización necesaria para obtener soluciones precisas solo con onda de choque, y se requieren técnicas especiales.
Una antena de gran tamaño puede ser una gran desventaja, por ejemplo en sistemas montados en vehículos. Además, los sistemas con una resolución temporal solo marginal pueden producir soluciones ambiguas, por cuanto que la información del momento de llegada de la onda de choque en un conjunto dado de sensores, es casi idéntica para dos posiciones de tirador en simetría especular.
Los algoritmos convencionales requieren al menos 4 detecciones de onda de choque y boca del cañón, de modo que pueda invertirse una matriz 4 x 4 para mapear una onda plana sobre el TOA de la onda de choque. Pequeños errores en la determinación del TOA de la onda de choque y de la boca del cañón, pueden producir errores sustanciales en el alcance de las estimaciones. Además, los algoritmos convencionales asumen una velocidad de la bala constante a lo largo de la trayectoria de la bala, lo que proporciona estimaciones de alcance imprecisas para disparos de largo alcance producidos desde una distancia de más de unos 300 m.
El documento US 5 930 202 da a conocer un método para determinar una trayectoria no ambigua de un proyectil utilizando una matriz de sensores acústicos separados, de acuerdo con la parte precaracterizadora de la reivindicación 1.
Resumen de la invención La invención se ocupa de las deficiencias del arte previo, proporcionando un método caracterizado de acuerdo con la reivindicación 1.
Preferentemente, el método incluye además ejecutar un algoritmo genético para un número predefinido de generaciones, con una población inicial que incluye un número predeterminado de individuos, estando cada individuo representado por una 4-tupla que incluye el acimut del tirador, la elevación del tirador, el acimut fallido y la elevación fallida, y calcular residuos para los individuos en cada generación, incluyendo en los residuos un ajuste por mínimos cuadrados de una combinación de señales de onda de choque TDOA y de rebufo. Si la relación entre la solución con el residuo mínimo y su solución alternativa ambigua es mayor que un valor predefinido, por ejemplo un valor de por lo menos 2, entonces la solución con el mínimo residuo calculado se designa como la trayectoria del proyectil desambiguada. Para impedir que se interpreten señales espurias, como formas de onda de la onda de choque, una trayectoria de proyectil puede ser eliminada como falsa si la energía acústica de la forma de onda de la onda de choque medida, tiene menos de un valor umbral sobre una banda de frecuencia predeterminada, por ejemplo frecuencias entre aproximadamente 700 Hz y 10 kHz. Alternativa o adicionalmente, puede eliminarse la trayectoria de un proyectil y ser considerada como falsa, si un intervalo estimado en el que una forma de onda de la onda de choque tiene un valor positivo, es menor que un tiempo mínimo o mayor que un tiempo máximo, por ejemplo menor de aproximadamente 70 μs o mayor de aproximadamente 300 μs.
En realizaciones ventajosas, puede determinarse la energía total mediante integrar la energía emitida sobre la ventana, preferentemente despreciando partes de la señal detectada, provocadas por ecos de la onda de choque. 10 Ventajosamente, el valor máximo de la señal puede determinarse en la ventana que produce la energía total máxima y, si el valor máximo de señal es mayor que la energía total medida en la ventana en un factor proporcional preferido, el valor máximo de señal puede identificarse como estando relacionado con la señal de la boca del cañón.
Realizaciones de la invención pueden incluir una o más de las siguientes características. La distribución de error de sincronización, de la antena y/o los sensores acústicos, puede relacionarse con variaciones de ganancia, variaciones de muestreo y variaciones de localización del sensor, de los sensores de antena. El nivel de confianza para la desambiguación depende del tamaño de la antena, de forma que las antenas menores requieren mayor precisión de medida. Si existen dos soluciones ambiguas, la trayectoria desambiguada del proyectil es seleccionada en función de una relación de los residuos para dos soluciones ambiguas.
En otras realizaciones ventajosas, las diferencias entre tiempos de llegada (TDOA) para pares de sensores pueden determinarse mediante designar como el sensor de referencia un sensor que encuentra primero la onda de choque, y activar un primer seguro de un circuito de sincronización cuando la amplitud, por ejemplo la parte inicial de la señal solo de onda de choque, en el sensor de referencia, cruza un valor umbral. El primer seguro activa contadores de inicio para cada uno de los otros sensores, funcionando el contador en cada uno de los otros sensores hasta que el sensor correspondiente encuentra la onda de choque. Cuando uno de los otros sensores encuentra, por ejemplo, la parte inicial de la señal solo de onda de choque, activa un segundo seguro para tal sensor, que detiene el contador inicial para tal sensor. Después se registra los valores TDOA para los otros sensores, en relación con el sensor de referencia.
Otras características y ventajas de la presente invención resultarán evidentes a partir de la siguiente descripción de las realizaciones preferidas, y a partir de las reivindicaciones.
Breve descripción de los dibujos Estas y otras características y ventajas de la invención, se comprenderán de forma más completa mediante la siguiente descripción ilustrativa, haciendo referencia a los dibujos anexos, en los que se etiqueta elementos con números de referencia, y que pueden no estar a escala.
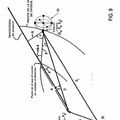
La figura 1 muestra esquemáticamente una vista en sección transversal, de un cono de Mach cruzando una antena;
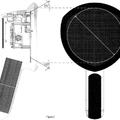
la figura 2 muestra esquemáticamente una matriz de sensores con 7 sensores acústicos omnidireccionales;
la figura 3 muestra esquemáticamente... [Seguir leyendo]
Reivindicaciones:
1. Un método para determinar una trayectoria del proyectil no ambigua utilizando una matriz de sensores acústicos separados (22-28) cuando una onda de choque asociada con un proyectil es detectada mediante, por lo menos, cinco de los sensores, pero un rebufo asociado con el proyectil es detectado mediante menos de cuatro de los sensores, que comprende:
obtener mediciones TDOA de onda de choque desde los sensores que detectan la onda de choque;
caracterizado por:
obtener (302) cuatro o más mediciones de TDOA de la onda de choque desde los sensores que detectan la onda de choque, en donde las mediciones de TDOA de la onda de choque son insuficientes para calcular la trayectoria no ambigua del proyectil;
obtener menos de tres mediciones TDOA del rebufo, desde los sensores que detectan el rebufo; y calcular iterativamente (308) soluciones a un modelo balístico utilizando las mediciones de TDOA de la onda de choque y las mediciones de TDOA del rebufo, para obtener la trayectoria no ambigua del proyectil.
2. El método acorde con la reivindicación 1, en el que una o dos mediciones TDOA del rebufo se obtienen a partir de los sensores que detectan el rebufo.
3. El método acorde con la reivindicación 2, en el que la trayectoria no ambigua del proyectil se calcula utilizando un algoritmo genético (300) .
4. El método acorde con la reivindicación 3, en el que la ejecución del algoritmo genético comprende utilizar un número predefinido de generaciones con una población inicial que incluye un número predeterminado de individuos, en el que cada individuo está representado por una 4-tupla que incluye el acimut del tirador, la elevación del tirador, el acimut fallido y la elevación fallida.
5. El método acorde con la reivindicación 4, en el que se calculan (314) los residuos para los individuos en cada generación, incluyendo dichos residuos un ajuste por mínimos cuadrados de una combinación de las mediciones TDOA de la onda de choque y las mediciones TDOA del rebufo.
6. El método acorde con la reivindicación 5, en el que si la relación entre la solución con el residuo mínimo y su solución alternativa ambigua es mayor que un valor predefinido, la solución con el residuo calculado menor es designada (320) como la trayectoria no ambigua del proyectil.
7. El método acorde con la reivindicación 6, en el que la ejecución del algoritmo genético comprende aplicar (318) operadores de cruce y de mutación a la población inicial en una generación.
8. El método acorde con la reivindicación 7, en el que aplicar el operador de cruce incluye intercambiar por lo menos uno entre el acimut fallido y la elevación fallida, entre dos individuos de la población en una generación.
9. El método acorde con la reivindicación 7, en el que aplicar el operador de cruce incluye intercambiar por lo menos uno entre el acimut del tirador y el acimut de la trayectoria, entre dos individuos de la población en una generación.
10. El método acorde con la reivindicación 7, en el que el operador de mutación comprende mutación de campo, mutación incremental, mutación por alternancia y ausencia de mutación.
11. El método acorde con la reivindicación 10, en el que el operador de mutación de campo sustituye un valor de la 4-tupla con un valor seleccionado aleatoriamente.
12. El método acorde con la reivindicación 10, en el que el operador de mutación incremental induce una pequeña mutación en todos los campos de la 4-tupla.
13. El método acorde con la reivindicación 10, en el que el operador de mutación por alternancia cambia la solución de una generación por su solución alternativa ambigua en la generación.
14. El método acorde con la reivindicación 1, en el que calcular iterativamente soluciones para un modelo balístico se basa, por lo menos en parte, en un valor de un residuo para las mediciones TDOA obtenidas a partir de los sensores que detectan la onda de choque y a partir de los sensores que detectan el rebufo.
15. El método acorde la reivindicación 14, en el que el residuo es función de las diferencias entre las mediciones TDOA calculadas y medidas.
Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo, del 12 de Febrero de 2014, de ATLAS ELEKTRONIK GMBH: Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos de marcación medidos en diferentes momentos, que […]
Procedimiento para generar rutas de localizador que jalonan la puntería, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondassonoras, los cuales se localizan en una zona marítima, […]
 Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
MÉTODO PARA IDENTIFICAR UN REBUFO, del 2 de Marzo de 2012, de Raytheon BBN Technologies Corp: Un método para identificar una señal de rebufo dentro de una señal generada por una matriz de sensores acústicos que forman una antena, que comprende: definir […]
 SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR, del 9 de Febrero de 2011, de BBN TECHNOLOGIES CORP.: Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende: medir señales solamente […]
SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR, del 9 de Febrero de 2011, de BBN TECHNOLOGIES CORP.: Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende: medir señales solamente […]
PROCEDIMIENTO PARA LA LOCALIZACION PASIVA DE OBJETIVOS IRRADIADORES DE SONIDO., del 1 de Enero de 2006, de ATLAS ELEKTRONIK GMBH: Procedimiento para la localización pasiva de objetivos irradiadores de sonido mediante la determinación de un ángulo de marcación con respecto al objetivo y una distancia […]
PROCEDIMIENTO DE DETERMINACIÓN DE LA DIRECCIÓN PARA DETECTAR Y RASTREAR ÁNGULOS DE MARCACIÓN SUCESIVOS, del 30 de Enero de 2012, de ATLAS ELEKTRONIK GMBH: Procedimiento de determinación de la dirección para detectar y rastrear ángulos de marcación (Θ) sucesivos de objetivos emisores de sonido a través de todo el […]