Dispositivo portátil para la rehabilitación del miembro superior.
El dispositivo (10) portátil para rehabilitar a un usuario afectado por una discapacidad con dificultades para ejecutar funcionesde extensión y de elevación simultáneas comprende un soporte (12)para el brazo al que puede sujetarse el antebrazo del usuario ymedios (16) para permitir el movimiento del soporte para el brazosobre una superficie.
Además comprende medios (18) para monitorizar el movimiento del soporte para el brazo y medios (13) para detectar una fuerza ejercida por el brazo del usuario en una dirección ortogonal a la superficie. El dispositivo permite al usuariorealizar movimientos de extensión en un área amplia de trabajo teniendo el antebrazo soportado y sujeto. El hecho de que el antebrazo esté soportado y sujeto al dispositivo permite un mejor control de los movimientos de entrenamiento del hombro, evitando trayectorias descontroladas a nivel del codo que son posibles en casode agarrar sólo un asidero.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2008/000365.
Solicitante: FUNDACION TECNALIA RESEARCH & INNOVATION.
Nacionalidad solicitante: España.
Inventor/es: KELLER,Thierry, CAVALLARO,ETTORE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61H1/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 1/00 Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados . › Aparatos para ejercicios de extensión o flexión.
- A63B22/20 A […] › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 22/00 Aparatos de ejercicio especialmente adaptados al entrenamiento del sistema cardiovascular, para ejercitar la agilidad o la coordinación de los movimientos (aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos correspondientes A63B 24/00). › utilizando ruedas, rodillos, ruedecitas o similares desplazados sobre el suelo o sobre cualquier otra superficie durante el ejercicio.
PDF original: ES-2431056_T3.pdf
Fragmento de la descripción:
Dispositivo portátil para la rehabilitación del miembro superior
Campo técnico
La presente invención se refiere a un dispositivo portátil para rehabilitar a un usuario afectado por una discapacidad con dificultades para ejecutar funciones de extensión y de elevación simultáneas. El dispositivo es adecuado en particular para su uso en programas de fisioterapia y/o rehabilitación para el tratamiento de lesiones o enfermedades neurovasculares o musculoesqueléticas del miembro superior.
Descripción de la técnica relacionada Cientos de miles de personas se ven incapacitadas cada año debido a alteraciones motoras del miembro superior. La alteración se puede deber a enfermedades neurológicas tales como ictus (véase por ejemplo las estadísticas de 2007 de ataques y enfermedades del corazón publicadas por la American Heart association y la American stroke association) , o se puede deber a lesiones musculoesqueléticas. En ambos casos la enfermedad puede dar como resultado un rango de movimiento disminuido, debilidad muscular, pérdida de velocidad y/o coordinación reducida del miembro afectado.
Se sabe que la fisioterapia es eficaz para reducir el grado de discapacidad (Nancy Byl et al., Neurorehabilitation and Neural Repair, vol. 17, n.º 3, 176-191 (2003) ; Darlene Hertling, publicado por Lippincott Williams y Wilkins, 2005) . El trabajo de investigación publicado recientemente (Liesbet De Wit et al., Stroke. 2007; 38; 2101) confirma que se obtienen mejores resultados en la rehabilitación en aquellos centros sanitarios en los que los pacientes reciben más tratamiento al día durante periodos de tiempo prolongados. Actualmente, la fisioterapia sólo se administra en hospitales o centros sanitarios especializados. Un fisioterapeuta hace que el paciente realice una serie de ejercicios repetitivos durante sesiones de entrenamiento que generalmente tienen un número y duración limitados debido a la disponibilidad de terapeutas y al coste. Además, generalmente es difícil valorar el grado de alteración al inicio del tratamiento y cuantificar los beneficios de los tratamientos debido a la falta de técnicas de medición objetivas.
Los dispositivos robotizados tienen la posibilidad de mejorar esta situación. Un robot inteligente, acoplado mecánicamente con el brazo del paciente, se puede usar para ayudar al paciente a llevar a cabo los ejercicios durante el periodo de rehabilitación, aumentando así el tiempo invertido en el entrenamiento de rehabilitación. Además, los sensores del robot se pueden usar para valorar el grado de la alteración al inicio del ciclo terapéutico y monitorizar los progresos.
De hecho, se han desarrollado una serie de dispositivos robotizados en los últimos años tanto con fines académicos como comerciales. Por ejemplo, en la University of Washington, Seattle, EE.UU. se ha desarrollado un exoesqueleto de miembro superior accionado con 7 grados de libertad como un dispositivo de rehabilitación/asistencia para tratar las disfunciones que implican una pérdida de fuerza en el miembro superior. Investigadores en la Scuola Superiore Sant’Anna, Pisa, Italia desarrollaron el sistema MEMOS, un robot cartesiano con dos grados de libertad de bajo coste para la recuperación motriz del miembro superior tras un ictus. El sistema ACT 3D se ha desarrollado en la North-western University, EE.UU., para crear un mundo virtual para el entrenamiento del movimiento del brazo durante las funciones de prensión y liberación.
La investigación en entornos académicos ha generado también una pequeña cantidad de dispositivos comerciales. Por ejemplo, el MIT-Manus desarrollado en el marco de la investigación académica en MIT, Boston, EE.UU. y patentado posteriormente (patente estadounidense n.º 5.466.213 (1995) ) se comercializa ahora por Interactive Motion Technology, EE.UU., como los dispositivos InMotion 1, 2, 3 para su uso en la rehabilitación del hombro, el codo y la muñeca.
De forma similar hay una serie de patentes presentadas en el campo. Por ejemplo, Erlandson (patente estadounidense n.º 4.936.299 (1990) ) describe un aparato y procedimiento para rehabilitación que se aprovecha de un brazo robotizado controlado por una CPU. Baker (patente n.º CA 2 244 358 (2000) ) describe un dispositivo terapéutico de rotación de la muñeca para la rehabilitación de la muñeca. Reinkensmeyer et al. (patente estadounidense n.º 6.613.000 (2003) ) describe un sistema basado en ordenador que proporciona un tratamiento para el movimiento del brazo para pacientes con alteraciones sensoriales que puede ser operado a través de la web y proporciona programas personalizados de ejercicio terapéutico. Diaz et al. (patente estadounidense n.º 2005/0273022 A1 (2005) ) describen un dispositivo médico portátil para la rehabilitación articular mediante un movimiento pasivo continuo. Dewald et al. (patente estadounidense n.º 2007/0066918 A1 (2007) ) describen un sistema para la rehabilitación de la disfunción en la coordinación de los miembros inducida por la fuerza de la gravedad después de un ictus u otros trastornos neurológicos.
Los resultados de ensayos clínicos y de estudio llevados a cabo con robots tales como el MIT-Manus muestran que el tratamiento mediante robot es seguro, bien aceptado por los pacientes y útil (véase por ejemplo Krebs et al., Technol. Health Care 7, 6 (diciembre 1999) , 419-423.) .
Sin embargo, la presente generación de robots de rehabilitación aún presenta algunas cuestiones sin resolver que impiden su uso a gran escala. Entre éstas el coste es una importante. El dispositivo robotizado debería ser lo suficientemente económico para que los centros sanitarios lo adoptaran en gran medida. La simplicidad de uso es también una cuestión en caso de que los pacientes tengan que utilizar el dispositivo robotizado en el domicilio. La característica de “uso doméstico” también requiere la portabilidad del dispositivo.
De hecho los dispositivos y/o patentes descritos anteriormente se pueden clasificar en líneas generales en dos categorías: (1) dispositivos caros y no portátiles que se pueden usar para implementar una serie de diferentes programas de rehabilitación dada su compleja estructura; (2) dispositivos más sencillos, más especializados que se pueden usar para un número limitado de programas de rehabilitación.
Se han publicado diversas patentes para tales dispositivos especializados. Por ejemplo,
la patente estadounidense n.º 2007/0021692 describe un sistema para realizar movimientos inducidos de los miembros. Las trayectorias de la mano o el pie se registran mediante sensores de posición y se puede registrar la presión ejercida por el miembro.
La patente WO n.º 99/61110 describe un sistema para el entrenamiento de movimientos de extensión rápidos (movimientos de anticipación) . El sistema incorpora medición de la posición (mano, brazo, articulaciones) , medición con EMG y retroacción al usuario.
La patente estadounidense n.º 7.311.643 describe un tablero portátil de ejercicios para el hombro y el miembro superior. Proporciona medios para mover un asidero en un plano con un coeficiente de fricción discretamente variable.
La patente japonesa n.º 2007185325 describe un sistema para realizar ejercicios de extensión sobre una mesa. El sistema es portátil y proporciona medición de la posición y de la fuerza ejercida por el usuario en un asidero. La posición del asidero no proporciona información acerca de la configuración del brazo.
La patente japonesa n.º 2002272795 describe un dispositivo de rehabilitación del miembro superior que incluye una medición de la posición y de la fuerza ejercida por el usuario en un asidero (dispositivo de transporte) y medios de retroacción. El sistema requiere una mesa de instrumentos con guías sobre las que puede moverse el dispositivo de transporte.
La patente japonesa n.º 2004008605 describe un aparato de entrenamiento de rehabilitación de miembros. Proporciona medios para medir la fuerza ejercida por un miembro sobre un dispositivo fijo junto con medios para proporcionar retroacción al usuario, tal como vídeo, sonido, vibración) .
El documento WO 2008/050297 divulga un dispositivo de entrenamiento para pacientes con discapacidades físicas. Se puede mover sobre una superficie y tiene un disco dedicado. Además está equipado con un soporte Shell, sobre el que puede estar colocada al menos parcialmente una extremidad del paciente.
El documento US 6.155.933 divulga un instrumento para medir variables cinéticas y cinemáticas de funciones motoras multiarticulares, que comprende: una conexión que tiene cuatro enlaces conectados a cuatro articulaciones, teniendo cada articulación una unión con un eje, siendo... [Seguir leyendo]
Reivindicaciones:
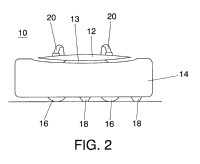
1. Dispositivo (10) portátil para rehabilitar a un usuario afectado por una discapacidad con dificultades para ejecutar funciones de extensión y de elevación simultáneas, que comprende:
-un reposabrazos (12) para el antebrazo del usuario
-medios (16) para permitir el movimiento del reposabrazos sobre una superficie,
-medios (18) para monitorizar el movimiento del reposabrazos y
-medios (13) para detectar una fuerza ejercida por el brazo del usuario en una dirección ortogonal a la superficie, caracterizado porque el dispositivo (10) portátil comprende además medios (20) de sujeción para sujetar el antebrazo al reposabrazos y porque los medios (13) para detectar la fuerza están adaptados para medir una fuerza de elevación ejercida por el brazo del usuario.
2. Dispositivo portátil según la reivindicación 1, en el que los medios para permitir el movimiento del reposabrazos son ruedas esféricas o ruedas convencionales.
3. Dispositivo portátil según la reivindicación 1, en el que los medios para permitir el movimiento del reposabrazos consisten en una base plana que se puede arrastrar sobre una almohadilla (120) .
4. Dispositivo portátil según cualquiera de las reivindicaciones anteriores, que comprende además al menos un accionador (22) para proporcionar un movimiento asistido o movimiento activo.
5. Dispositivo portátil según cualquiera de las reivindicaciones 1 a 3, en el que el dispositivo portátil se usa para soportar pasivamente el antebrazo.
6. Dispositivo portátil según cualquiera de las reivindicaciones 1 a 3, que comprende al menos un sistema de frenado para controlar el movimiento.
7. Dispositivo portátil según cualquiera de las reivindicaciones anteriores, en el que los medios para detectar una fuerza ejercida por el brazo del usuario comprenden al menos un sensor de fuerza.
8. Dispositivo portátil según cualquiera de las reivindicaciones anteriores, en el que los medios para monitorizar el movimiento del reposabrazos están adaptados para monitorizar la posición, y/o velocidad, y/o aceleración, y orientación del reposabrazos, en el que la orientación se define como el ángulo del eje largo del reposabrazos respecto a su posición inicial, y comprenden al menos un sensor de posición.
9. Dispositivo portátil según cualquiera de las reivindicaciones anteriores, que comprende además una base (14) que proporciona los medios para el movimiento del dispositivo sobre una superficie, estando conectado el reposabrazos (12) a la base del dispositivo.
10. Dispositivo portátil según la reivindicación 9, que comprende medios para fijar el reposabrazos a diferentes alturas con respecto a la base del dispositivo, o en el que el reposabrazos está dotado de al menos un accionador (24) para controlar la altura del reposabrazos con respecto a la base del dispositivo.
11. Dispositivo portátil según la reivindicación 9, en el que el reposabrazos puede rotar libremente o mediante accionadores controlados a lo largo de su eje principal con el fin de facilitar movimientos de pronación-supinación del antebrazo.
12. Dispositivo portátil según cualquiera de las reivindicaciones anteriores, que comprende además medios para medir la posición articular para monitorizar directamente las articulaciones de la muñeca, el codo y el hombro del paciente.
13. Sistema que comprende un dispositivo (10) portátil según cualquiera de las reivindicaciones anteriores y una unidad (30) de retroacción y cálculo, que comprende una unidad (32) de procesamiento central, una unidad (36) de almacenamiento, una interfaz (40) de retroacción y una unidad (34) de comunicación por cables o inalámbrica, y en el que la unidad (30) de retroacción y cálculo está dotada para implementar una retroacción visual, o acústica, o táctil, o una combinación de las mismas.
14. Sistema según la reivindicación 13, que comprende además un conjunto de cámaras CMOS o CCD de baja resolución para monitorizar con vídeo los movimientos de entrenamiento del brazo de manera cualitativa y/o cuantitativa.
15. Sistema según cualquiera de las reivindicaciones 13 a 14, que comprende además una almohadilla que contiene zonas con alturas diferentes.
16. Sistema según cualquiera de las reivindicaciones 13 a 15, que comprende además una unidad (60) de
visualización y control a distancia para su uso por el personal (80) facultativo para monitorizar y controlar los procedimientos de rehabilitación de pacientes que comprende un procesador, que tiene medios (62) para transmitir y recibir información a y desde la unidad (30) de retroacción y cálculo.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo de estiramiento de fascia plantar y tendón de aquiles, del 29 de Julio de 2020, de RODRÍGUEZ SANZ, David: 1. Dispositivo de estiramiento de la fascia plantar y el tendón de Aquiles caracterizado porque comprende una pieza semicircular como apoyo del pie con dos […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Aparato de terapia, del 8 de Julio de 2020, de Lime Medical GmbH: Aparato de terapia para realizar un movimiento continuo, pasivo y/o asistido activamente de los dedos y del pulgar de la mano de un paciente, que comprende: […]
Sistema electromédico automatizado y método de gestión relacionado, del 1 de Julio de 2020, de Lauro Group S.r.l: Sistema electromédico automatizado para tratar, curar, analizar y monitorizar una pluralidad de condiciones médicas relacionadas con la columna […]
DISPOSITIVO DE REHABILITACIÓN PARA LAS EXTREMIDADES INFERIORES, del 25 de Junio de 2020, de HOSPITAL SANT JOAN DE DEU: El dispositivo de rehabilitación para las extremidades inferiores comprende un suspensor para colocar un arnés para un usuario del dispositivo de rehabilitación […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]