Aparato para la manipulación automatizada de unidades de carga en almacenes equipados con estructuras de tipo estante.
Un aparato para manipular bienes en almacenes equipados con estructuras de tipo estante que comprende:
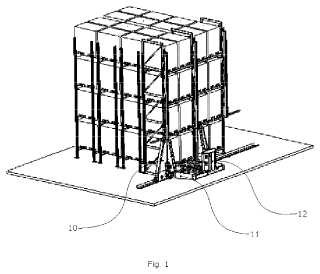
por lomenos un primer dispositivo automotriz (10) adaptado para trasladarse en sentido horizontal a lo largo de un pasodeslizante sobre unas pistas rectas a lo largo de dicho estante y que comprende por lo menos un segundodispositivo automotriz (11) adaptado para trasladarse en sentido vertical sobre unas pistas rectas a lo largo de dichoestante y que comprende, a su vez, por lo menos un dispositivo de recogida (12) adaptado para desmontarse dedicho segundo dispositivo automotriz (11), para insertarse en los planos de dicho estante para alcanzar la posiciónde trabajo previamente establecida con el fin de recoger o descargar la unidad de carga seleccionada (13) y por último para volver a dicho segundo dispositivo automotriz (11); caracterizado por que este comprende además untercer dispositivo automotriz (15) adaptado para transferir las unidades de carga desde el primer dispositivoautomotriz (10) hasta el puesto de descarga de material o desde el puesto de carga de material hasta el primerdispositivo automotriz (10) y adaptado además para usar el mismo paso deslizante usado por dicho primerdispositivo automotriz (10), y un equipo de guiado que comprende dichas pistas horizontal y vertical adaptadas parainstalarse sobre dichos estantes o estructuras de almacén similares asignadas al almacenamiento de los bienes ypara la interconexión con los dispositivos automotriz y de recogida (10, 11, 12) de dicho aparato con el fin de permitirentonces la interacción con dichas estructuras de almacén para alcanzar la posición de las unidades de carga quehan de manipularse.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11188576.
Solicitante: Modul Blok Centro S.r.l.
Inventor/es: FOGLIA,GIANFRANCO, CALVELLI,PIERO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
PDF original: ES-2431028_T3.pdf
Fragmento de la descripción:
Aparato para la manipulación automatizada de unidades de carga en almacenes equipados con estructuras de tipo estante 5
Campo de la invención [0001] La presente invención se refiere al campo técnico de los sistemas de manipulación de bienes, en particular al campo técnico de los sistemas de manipulación de bienes en almacenes equipados con estructuras de tipo estante.
Estado de la técnica [0002] Existen muchas soluciones de almacenamiento manual que se usan hoy en día, y estas son bastante diferentes una con respecto a otra. Los sistemas implementados varían de acuerdo con las necesidades de almacenamiento y con el tipo de materiales que van a almacenarse.
Existen diversos sistemas de almacenamiento para almacenar de forma manual bienes comenzando con el de “apilamiento” y continuando con las estructuras convencionales del tipo así denominado de “porta–plataformas de carga”, las estructuras de tipo “compacto”, las estructuras con “bases móviles” y las estructuras que comprenden así
denominadas estanterías de “pasillo dinámico”.
Cada uno de estos tipos requiere algo de intervención por parte de un operario para la manipulación física de las unidades de carga (que se mencionan a continuación en el presente documento con el acrónimo l.u., loading unit) . El operario designado usa, principalmente, carretillas elevadoras de accionamiento manual o eléctrico para tal
manipulación y equipadas, de acuerdo con los casos, con una horquilla frontal o lateral.
Todas las carretillas elevadoras prevén la manipulación mediante la recogida con horquilla del material y mediante la elevación de este y su extracción de, o su inserción en, la estantería seleccionada para el almacenamiento del mismo.
Los espacios de pasillo pueden variar de forma significativa, de acuerdo con el tipo de la plataforma rodante y el tipo de la estantería que se usen. Por ejemplo, en el caso de las carretillas elevadoras de horquilla con carga frontal, existen unos pasillos con, habitualmente, unas dimensiones de aproximadamente 2, 7–3 m, en el caso de las carretillas elevadoras de horquilla con horquillas retráctiles, existen unos pasillos de aproximadamente 2, 5 m, en el
caso de las carretillas elevadoras de horquilla con carga / descarga lateral, existen unos pasillos de aproximadamente 1, 5 m, en el caso de una plataforma rodante de recogida ordenada con conductor, con posibilidad de elevar el operario, existen unos pasillos de aproximadamente 1, 2 m.
Hoy en día, existen muchas soluciones de almacenamiento automatizadas y estas son bastante diferentes una con respecto a otra. Al igual que con el almacenamiento manual, los sistemas implementados varían de acuerdo con las necesidades de almacenamiento y con el tipo de materiales que van a almacenarse pero también, y en especial, de acuerdo con la programación de manipulación de productos.
De hecho, la gestión del almacenamiento de bienes y de las operaciones de almacenaje prevé el uso de unos 45 sistemas que pueden configurarse y aplicarse de forma diferente cada vez, de acuerdo con las necesidades del usuario o con el problema que ha de solucionarse.
La mayor parte de los almacenes automatizados que se usan hoy en día se basan en la tecnología de AS / RS (Automated Storage & Retrieval System, Sistema de Almacenamiento y de Recuperación Automatizado) , 50 tecnología que usa unos sistemas de traslación–elevación que manipulan las l.u. dentro de unos pasillos de almacenamiento en varios niveles. Los materiales se almacenan en unas estructuras de metal que se dimensionan cada vez de acuerdo con los materiales que van a almacenarse. El dispositivo de traslación–elevación se desplaza dentro del pasillo y recoge y coloca los materiales, por medio de unos dispositivos de recogida (horquillas o satélites) , transportando de este modo los materiales hacia una boca de carga / descarga que se encuentra 55 habitualmente en la cabecera del pasillo de servicio.
Las estructuras usadas pueden variar desde una estantería simple con estantes hasta una estantería autosustentable, en la que la estructura usada también sirve como almacén de soporte y, por lo tanto, además de servir como estructura de almacenamiento de los bienes, esta también sirve como cubierta y construcción protectora 60 de los propios bienes.
Los tipos de almacenamiento automatizado que se usan normalmente por los fabricantes de los sistemas de almacenamiento automatizados dan lugar a los siguientes tipos de almacén: almacén de profundidad única; almacén de profundidad doble; almacén de profundidad múltiple; almacenes continuos.
El almacén de profundidad única se caracteriza por que el dispositivo de traslación–elevación se desplaza dentro del pasillo de almacenamiento y tiene acceso directo a todas las unidades de carga a ambos lados del mismo. En este tipo de almacén, las estructuras de tipo de “porta–plataformas de carga” se implementan de forma normal y las l.u. se almacenan trabajando sobre el borde de la plataforma de carga, que tiene en general una dimensión de 800 mm. Este tipo de almacén es adecuado para usuarios con un alto número de artículos o necesidades particulares para una rápida accesibilidad al producto almacenado.
El almacén de profundidad doble se caracteriza por que el dispositivo de traslación–elevación se desplaza dentro del pasillo de almacenamiento y tiene acceso a todas las unidades de carga a ambos lados del dispositivo de traslación–elevación y en profundidad doble. Esto da como resultado la necesidad de crear algunas así denominadas “misiones móviles” de las l.u. en el almacén, de un modo tal que se pueda acceder a las unidades almacenadas en la segunda profundidad. En este tipo de almacén, las estructuras de tipo de “porta–plataformas de carga” se implementan de forma normal y las l.u. se almacenan trabajando sobre el borde de la plataforma de carga, que tiene en general una dimensión de 800 mm. Este tipo de almacén es adecuado para usuarios con un alto número de artículos y cantidades variables para todos los artículos individuales. Este también ofrece la oportunidad de almacenar material que constituye una reserva para el material que se recoge habitualmente.
El almacén de profundidad múltiple se caracteriza por que el dispositivo de traslación–elevación se desplaza dentro del pasillo de almacenamiento y tiene acceso a todas las unidades de carga a ambos lados del dispositivo de traslación–elevación y en profundidad múltiple. El dispositivo usado para este tipo de manipulación es un dispositivo satélite. En general, las estructuras así denominadas de tipo “compacto” se implementan y las l.u. se almacenan trabajando sobre el borde de la plataforma de carga de 1200 mm. Dada su complejidad relacionada, este tipo de almacén es adecuado para usuarios que no presenten un alto número de artículos ni un alto número de manipulaciones.
Todas las líneas en el almacén de tipo continuo consisten en un transportador por gravedad automatizado. El dispositivo de traslación–elevación alimenta las líneas y otro dispositivo de traslación–elevación descarga las l.u. del lado opuesto. En este tipo de almacén, en general las estructuras de tipo de “porta–plataformas de carga” se implementan y las l.u. se almacenan trabajando sobre el borde de la plataforma de carga, que tiene en general una dimensión de 800 mm. Este tipo de almacén es adecuado para usuarios que tienen un muy alto número de artículos y un número de manipulaciones que se ha de respetar una estricta FIFO (Primero en entrar / Primero en salir) o cumplir unas necesidades de acumulación rápida.
Existen variantes de los tipos que se han descrito con brevedad en lo que antecede, por ejemplo pueden aplicarse varias horquillas de recogida sobre un dispositivo de traslación–elevación o puede usarse un dispositivo de traslación–elevación para manipular varios satélites dentro del mismo pasillo o de nuevo, puede usarse un dispositivo de traslación–elevación en varios pasillos por medio del uso de un así denominado dispositivo de “bogie” específico, etc.
En cualquier caso, la característica común que se encuentra en todos los sistemas individuales es la de usar un dispositivo de traslación–elevación llamado para funcionar sobre unas pistas específicas, ambas aplicadas sobre el suelo y en la parte de arriba de las estructuras, estructuras que también sirven como referencia y soporte para el propio dispositivo de traslación–elevación.... [Seguir leyendo]
Reivindicaciones:
1. Un aparato para manipular bienes en almacenes equipados con estructuras de tipo estante que comprende: por lo menos un primer dispositivo automotriz (10) adaptado para trasladarse en sentido horizontal a lo largo de un paso deslizante sobre unas pistas rectas a lo largo de dicho estante y que comprende por lo menos un segundo dispositivo automotriz (11) adaptado para trasladarse en sentido vertical sobre unas pistas rectas a lo largo de dicho estante y que comprende, a su vez, por lo menos un dispositivo de recogida (12) adaptado para desmontarse de dicho segundo dispositivo automotriz (11) , para insertarse en los planos de dicho estante para alcanzar la posición de trabajo previamente establecida con el fin de recoger o descargar la unidad de carga seleccionada (13) y por último para volver a dicho segundo dispositivo automotriz (11) ; caracterizado por que este comprende además un tercer dispositivo automotriz (15) adaptado para transferir las unidades de carga desde el primer dispositivo automotriz (10) hasta el puesto de descarga de material o desde el puesto de carga de material hasta el primer dispositivo automotriz (10) y adaptado además para usar el mismo paso deslizante usado por dicho primer dispositivo automotriz (10) , y un equipo de guiado que comprende dichas pistas horizontal y vertical adaptadas para instalarse sobre dichos estantes o estructuras de almacén similares asignadas al almacenamiento de los bienes y para la interconexión con los dispositivos automotriz y de recogida (10, 11, 12) de dicho aparato con el fin de permitir entonces la interacción con dichas estructuras de almacén para alcanzar la posición de las unidades de carga que han de manipularse.
2. Un aparato de acuerdo con la reivindicación 1, en el que dicho dispositivo de recogida (12) se elige del grupo que comprende: dispositivos equipados con horquillas telescópicas de profundidad única y doble, dispositivos satélites con frente de trabajo de diversas medidas, dispositivos de leva de recogida.
3. Un aparato de acuerdo con las reivindicaciones 1–2, en el que dicho equipo de guiado comprende: por lo menos una guía de debajo (16) y por lo menos una guía de arriba (17) , adaptada para la interconexión con dicho primer dispositivo automotriz (10) ; por lo menos una guía de referencia (18) adaptada para permitir que dicho segundo dispositivo automotriz (11) ascienda por dicho estante, por lo menos una guía de deslizamiento (19) adaptada para la interconexión con dicho dispositivo de recogida (12) , estando además adaptadas dichas guías (16, 17, 18, 19) para fijarse a los montantes de dicho estante.
4. Un aparato de acuerdo con la reivindicación 3, en el que dicha guía de referencia (18) comprende un bastidor de enganche.
5. Un aparato de acuerdo con las reivindicaciones 1–4, en el que dicho primer dispositivo automotriz (10) comprende una estructura de soporte (21) que comprende, a su vez, unos medios de manipulación adaptados para trasladar en sentido horizontal dicho primer dispositivo automotriz (10) , unos medios de soporte y alojamiento para dicho segundo dispositivo automotriz (11) y unos medios de alimentación para dichos dispositivos automotrices primero y segundo (10, 11) .
6. Un aparato de acuerdo con la reivindicación 5, en el que dichos medios de manipulación comprenden por lo menos un motor eléctrico (23) y una pluralidad de ruedas (24, 27) adaptadas para deslizarse sobre por lo menos una pista, dichos medios de alimentación comprenden una columna de alimentación (25) equipada con unos medios para la conexión con cables de alimentación y por lo menos una pastilla de fricción (22) adaptada para alimentar dichos dispositivos automotrices primero y segundo (10, 11) en cada posición durante la totalidad del ciclo de trabajo, y dichos medios de soporte y alojamiento para dicho segundo dispositivo automotriz (11) comprenden una guía específica (26) solidaria con dicha estructura de soporte (21) .
7. Un aparato de acuerdo con las reivindicaciones 1–6, en el que dicho segundo dispositivo automotriz (11) comprende una estructura de soporte (30) que comprende, a su vez, unos medios de manipulación adaptados para trasladar en sentido vertical dicho segundo dispositivo automotriz (11) , unos medios de soporte y alojamiento (34) para dicho dispositivo de recogida (12) y unos medios de alimentación relacionados.
8. Un aparato de acuerdo con la reivindicación 7, en el que dichos medios de manipulación comprenden por lo menos un motor eléctrico (33) y una pluralidad de ruedas (32) adaptadas para deslizarse sobre por lo menos una pista, dichos medios de alimentación comprenden un brazo mecánico (31) adaptado para la interconexión con dicha columna de alimentación (25) mientras que dichos medios de soporte y alojamiento (34) para dicho dispositivo de recogida (12) comprenden por lo menos una guía (19) a lo largo de la cual hay libertad para hacer que se mueva dicho dispositivo de recogida.
9. Un aparato de acuerdo con las reivindicaciones 1–8, en el que dicho tercer dispositivo automotriz (15) comprende un armazón de base (35) que comprende unos medios de manipulación motorizados adecuados y que comprende una pluralidad de ruedas (36) y por lo menos una guía (37) a lo largo de la cual hay libertad para hacer que se mueva dicho dispositivo de recogida (12) .
10. Un aparato de acuerdo con las reivindicaciones 1–9, que comprende una pluralidad de dichos primeros dispositivos automotrices (10) , comprendiendo cada uno un segundo dispositivo automotriz (11) , o comprendiendo
un dispositivo automotriz (10) que comprende y está adaptado para controlar una pluralidad de dichos segundos dispositivos automotrices (11) .
Patentes similares o relacionadas:
Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, del 27 de Julio de 2020, de RUIZ DE LARA REDONDO, José Antonio: Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, capaces de trasladarse […]
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Dispositivo para transferencia de artículos e instalación para transporte de artículos, del 6 de Mayo de 2020, de DAIFUKU CO., LTD.: Dispositivo para transferencia de artículos (2B, 2C) configurado para desplazar un artículo (W) a lo largo de una dirección de transferencia (Y) […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Dispositivo lanzadera de almacén, y sistemas y métodos que lo incorporan, del 4 de Marzo de 2020, de Majied, Fadi Mohammad Majed Hussain Abdel: Sistema para desplazar palés que comprende: una rejilla rectangular que comprende carriles laterales orientados a lo largo de un eje x y carriles ortogonales […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]