Aparato de limpieza robótico autopropulsado para limpiar una superficie sumergida de una piscina o un depósito.
Aparato de limpieza robótico autopropulsado para limpiar una superficie sumergida de una piscina o un depósito,
comprendiendo: partes delantera, trasera y laterales adjuntas y una placa base provista de una entrada de agua; una bomba de agua para arrastrar agua y residuos desde la piscina o el depósito; soportes montados de forma giratoria acoplados próximos a las partes delantera y trasera del alojamiento, dichos soportes montados de forma giratoria incluyendo un par de soportes montados de forma giratoria cada uno de los cuales está acoplado a un extremo opuesto de un eje, los extremos del eje siendo móviles de forma deslizante a lo largo del alojamiento hacia delante y hacia atrás con relación a la trayectoria direccional del limpiador; y un control provisto para almacenar un programa de limpieza y un procesador, pudiendo presentar un conjunto de dirección que incluye un soporte montado de forma giratoria acoplado próximo a una de las partes delantera o trasera del alojamiento por una horquilla, dicha horquilla y dicho soporte montado de forma giratoria pudiendo girar simultáneamente alrededor de un eje geométrico central de un eje el cual está montado en el alojamiento del limpiador.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231844.
Solicitante: AQUA PRODUCTS INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 280 GROVE AVENUE 07009 CEDAR GROVE ESTADOS UNIDOS DE AMERICA.
Inventor/es: PORAT, JOSEPH, ERLICH, GIORA, CHILTON,Seth.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E04H4/16 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 4/00 Piscinas para nadar o para chapotear (generadores de olas en las bañeras A47K 3/10; separación de B01D; tratamiento del agua C02F; bombas que producen olas F04D 35/00). › especialmente adaptados para la limpieza de las piscinas para nadar o para chapotear (dispositivos de limpieza especiales para barcos B63B 59/00).
Fragmento de la descripción:
Aparato de limpieza robótico autopropulsado para limpiar una superficie sumergida de una piscina o un depósito
CAMPO DE LA INVENCIÓN
La presente invención se refiere a procedimientos y aparatos para controlar el rastreo o los modelos del movimiento transversal de un limpiador robótico automático de piscinas y
depósitos con respecto al fondo y a las paredes laterales de la piscina o el depósito y más específicamente a procedimientos y aparatos para controlar la dirección del limpiador de piscinas a lo largo del fondo y las paredes laterales de la piscina o depósito.
ANTECEDENTES DE LA INVENCIÓN
Los limpiadores de piscinas autopropulsados automáticos o robóticos tradicionalmente entran en contacto y se mueven sobre las superficies de la piscina que se está limpiando sobre ruedas montadas sobre ejes o en pistas sin fin que están impulsadas mediante un motor de accionamiento separado a través de un tren de engranajes. Las ruedas o pistas están alineadas con el eje geométrico longitudinal del limpiador. Los robots de limpieza de piscinas que se mueven sobre ruedas generalmente tienen dos motores eléctricos, un motor bomba que proporciona energía a una bomba de agua que se utiliza para sacar o aspirar residuos hasta un filtro y un motor de accionamiento el cual se utiliza para propulsar el robot sobre la superficie de la piscina que se van a limpiar. El motor de accionamiento puede estar conectado a través de un tren de engranajes directamente a una o más ruedas o ejes, o a través de una correa y poleas para propulsar el limpiador; o bien a una bomba de agua, la cual puede ser exterior al limpiador robótico que produce una corriente a presión, o chorro de agua, que mueve el aparato de limpieza por fuerza reactiva o mediante el accionamiento de una turbina conectada a través de un tren de engranajes a las ruedas o la pista sin fin. El movimiento de los limpiadores de piscinas de la técnica anterior, cuando están impulsados tanto por la turbina como por el chorro directo o reactivo es en una dirección y el movimiento es aleatorio.
El control del movimiento direccional longitudinal del limpiador de piscinas se puede conseguir mediante circuitos electrónicos elaborados, como es el caso cuando se emplean motores paso a paso y sin escobillas de corriente continua. Otros sistemas de control permiten que el limpiador suba por la pared lateral vertical de la piscina hasta que una parte del limpiador se extienda por encima del nivel del agua o el conjunto haya sido movido lateralmente a lo largo de la pared lateral, después de lo cual el accionamiento del motor invierte y el limpiador vuelve a la superficie del fondo de la piscina a lo largo de 5 una trayectoria diferente. Los limpiadores impulsados por agua de la técnica anterior también confían en la reorientación del limpiador mientras está en contacto con la pared para efectuar un cambio aleatorio en la dirección. Sin embargo, bajo ciertas circunstancias, es una pérdida de tiempo y de energía y produce un desgaste natural innecesario tener el limpiador robótico subiendo por la pared lateral meramente para el
propósito de cambiar la dirección del movimiento del limpiador.
También se ha propuesto dirigir el movimiento de rastreo de un limpiador de piscinas mecánicamente mediante la utilización de una matriz de tres ruedas en la cual la tercera rueda está montada centralmente y opuesta al otro par de ruedas y el eje sobre el cual
está montada la tercera rueda es capaz de girar en un plano horizontal alrededor de un eje geométrico vertical. Una versión denominada de ruedas libres de este aparato se presenta en el documento de patente americana US Nº 3, 979, 788.
En el documento de patente americana US Nº 3, 229, 315, la tercera rueda está montada en una placa y la placa está acoplada por un mecanismo de engranajes que gira positivamente el eje horizontal y determina los cambios direccionales en la orientación de la tercera rueda.
También es conocido en la técnica anterior proporcionar un limpiador de piscinas con un émbolo o pistón vertical que puede ser movido mediante una fuerza hidráulica al entrar en contacto con el fondo de la piscina para causar que el limpiador articule y cambie de dirección. La temporización debe ser controlada por un dispositivo de circuito integrado ("IC") previamente programado.
También es conocido a partir del documento de patente americana US Nº 4, 348, 192 equipar la manguera de agua de alimentación de un dispositivo de limpieza de piscinas que flota con una boquilla de chorro continuo de agua de descarga que se reorienta aleatoriamente él mismo hacia una dirección inversa cuando se impide el movimiento hacia delante del limpiador que flota. Además de la boquilla de descarga del chorro de agua móvil unida al lado inferior del limpiador que flota, la manguera está equipada con una pluralidad de boquillas de chorro encaradas hacia atrás que mueven la manguera del
agua con un modelo aleatorio y facilita el movimiento del limpiador.
Los limpiadores comerciales de piscinas de la técnica anterior que emplean agua a presión para efectuar el movimiento aleatorio también han estado equipados con las 5 denominadas válvulas "de reserva" que periódicamente interrumpen y derivan el flujo de agua hacia el limpiador y lo descargan a través de una válvula que tiene chorros encarados a contracorriente, creando de ese modo una fuerza reactiva para mover la manguera y, quizás, el limpiador unido en una dirección globalmente hacia atrás. La válvula de reserva puede ser accionada por el flujo de agua a través de un accesorio unido a la manguera. El movimiento que resulta a partir de la activación de los chorros de la válvula de reserva es también aleatorio y puede no tener efecto en la reorientación de un limpiador que ha sido inmovilizado, por ejemplo, en la esquina de la piscina o por una escalera o bien otra obstrucción.
El aparato de la técnica anterior para utilizarlo en la propulsión y la dirección el movimiento de rastreo de los limpiadores de piscinas robóticos automáticos carece de diversos aspectos importantes. Por ejemplo, las máquinas actuales del estado de la técnica emplean dispositivos de circuito integrado ("IC") previamente programados que producen un modelo de rastreo específico previamente determinado. El diseño y la fabricación de estos dispositivos de circuito integrado es relativamente cara y los modelos de rastreo producidos han resultado ser ineficaces en piscinas provistas de configuraciones irregulares o bien con obstrucciones construidas en sus fondos o paredes laterales.
Los limpiadores impulsados por una descarga de chorro de agua se mueven únicamente en una dirección globalmente hacia delante y su movimiento es aleatorio, una aleatoriedad de este tipo estando acentuada equipando al conjunto con una manguera flexible o cola que se mueve erráticamente con un movimiento brusco para alterar la dirección del limpiador.
Los limpiadores equipados con trenes de engranajes para el accionamiento de la ruedas o las pistas sin fin representan un gasto adicional en el diseño, fabricación y montaje de numerosas piezas ajustadas con precisión útil, el propietario o el operario del aparato también incurren en la dedicación de tiempo y en el gasto del mantenimiento y la adquisición de las piezas de recambio debido al desgaste natural durante la vida de la máquina. Un aparato de limpieza construido con una tercera rueda que puede articular que funciona de un modo aleatorio o según un programa tiene las mismas desventajas asociadas con la fabricación, el montaje y el mantenimiento de numerosas piezas pequeñas que se mueven.
Los limpiadores de piscinas robóticos de la técnica anterior también carecen de medios de control mecánico para el ajuste en el sitio de los modelos de rastreo del aparato con respecto a la configuración específica de la piscina que se va a limpiar.
En el documento de patente americana US Nº 6, 742, 613, un limpiador de piscinas robótico autopropulsado incluye un medio de accionamiento reversible para propulsar el aparato en direcciones opuestas, direcciones las cuales corresponden generalmente al eje geométrico longitudinal el aparato y un par de ruedas montadas en cada uno de los extremos longitudinales opuestos del limpiador. Cada par de ruedas están montadas en ejes transversales, los cuales se colocan y se aseguran manualmente, formando un ángulo que es agudo con relación al eje geométrico longitudinal del aparato, cuando el limpiador se mueve en por lo menos una dirección. En una forma de realización, los ejes están montados en muescas formadas en la base del alojamiento y uno o más pasadores ajustables manualmente están provistos para fijar...
Reivindicaciones:
1. Un aparato de limpieza robótico autopropulsado para limpiar una superficie sumergida de una piscina o un depósito que comprende:
un alojamiento provisto de una parte delantera, una parte trasera opuesta y partes laterales adjuntas que definen la periferia del aparato y una placa base con por lo menos una entrada de agua;
una bomba de agua configurada para arrastrar agua y residuos desde la piscina o el depósito a través de la por lo menos una entrada de agua para el filtrado y la descarga del agua filtrada a través de por lo menos una salida de descarga del agua;
soportes montados de forma giratoria acoplados próximos a las partes delantera y trasera del alojamiento, dichos soportes montados de forma giratoria incluyendo un par de soportes montados de forma giratoria cada uno de los cuales está acoplado a un extremo opuesto de un eje, los extremos del eje siendo móviles de forma deslizante a lo largo del alojamiento hacia delante y hacia atrás con relación a la trayectoria direccional del limpiador; y
un control provisto de una memoria para almacenar un programa de limpieza y un procesador eléctricamente acoplado a la memoria, el programa de limpieza siendo ejecutable por el procesador y pudiendo funcionar para controlar automáticamente la colocación de cada extremo del eje con relación al alojamiento para dirigir el aparato de limpieza mientras el limpiador se mueve en una dirección de avance o inversa.
2. El aparato de la reivindicación 1 adicionalmente comprendiendo un conjunto de dirección para dirigir el movimiento de los extremos del eje en respuesta a las señales de control que se reciben desde el control.
3. El aparato de la reivindicación 2 en el que el conjunto de dirección comprende por lo menos una guía de brida vertical colocada próxima a un extremo del eje respectivo y provista de una superficie superior que selectivamente se acopla con y se desacopla del extremo del eje.
4. El aparato de la reivindicación 3 en el que la por lo menos una guía de brida incluye una parte de la superficie superior inclinada.
5. El aparato de la reivindicación 3 en el que la por lo menos una guía de brida
incluye por lo menos una ranura del eje formada en la superficie superior que está dimensionada para circunscribir por lo menos un parte del extremo del eje y asegurar el extremo del eje en una posición seleccionada a lo largo de la trayectoria direccional.
6. El aparato de la reivindicación 5 en el que la por lo menos una ranura del eje es 10 una ranura individual colocada intermedia entre los extremos de la superficie superior.
7. El aparato de la reivindicación 5 en el que la por lo menos una ranura del eje es una pluralidad de ranuras del eje formadas en una relación de separación en la superficie superior.
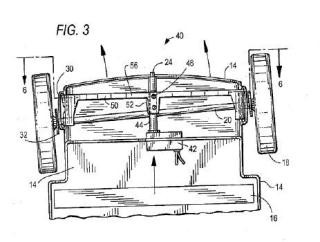
8. El aparato de la reivindicación 3 en el que la por lo menos una guía de brida vertical está acoplada a un elemento travesaño que se extiende transversalmente al eje geométrico longitudinal del limpiador, dicho elemento travesaño transversal estando unido a un árbol giratorio que está montado en el alojamiento.
9. El aparato de la reivindicación 8 en el que el giro del árbol está controlado por el control.
10. El aparato de la reivindicación 8 en el que el árbol es giratorio en una gama de 25 desde cinco hasta quince grados.
11. El aparato de la reivindicación 8 en el que la por lo menos una guía de brida vertical incluye un par de guías de brida verticales opuestas, cada guía de brida estando respectivamente acoplada a un extremo opuesto del elemento travesaño que se extiende transversalmente al eje geométrico longitudinal del limpiador, dicho elemento travesaño transversal estando montado en su parte media al árbol giratorio.
12. El aparato de la reivindicación 8 en el que el elemento travesaño es flexible y forma arco hacia abajo desde la mitad del árbol giratorio.
13. El aparato de la reivindicación 1 en el que cada extremo opuesto de un eje se extiende a través de una muesca alargada respectiva formada en las partes laterales del alojamiento, dichas muescas estando orientadas sustancialmente paralelas a la superficie que está siendo limpiada y estando dimensionadas para permitir el movimiento
direccional hacia delante y hacia atrás del extremo del eje en su interior.
14. El aparato de la reivindicación 13 en el que cada muesca alargada está formada en una pared lateral interior de la parte lateral del alojamiento, dicho aparato adicionalmente comprendiendo una pared lateral de estabilización del eje exterior
montada por encima y adyacente a la pared lateral interior para formar entre ellas un canal de recepción, dicha pared lateral de estabilización exterior incluyendo una muesca exterior configurada para alinearse con la muesca alargada y también recibir el extremo opuesto del eje a través de las mismas y en el que el canal de recepción está configurado para recibir una guía de brida vertical correspondiente.
15. El aparato de la reivindicación 3 en el que cada guía de brida vertical está montada en un árbol correspondiente que se extiende a lo largo del eje geométrico longitudinal del limpiador, cada uno de dichos árboles estando provisto de un extremo libre acoplado a medios para girar la guía de brida vertical para acoplarse y desacoplarse de un extremo correspondiente del eje.
16. El aparato de la reivindicación 15 en el que los medios para girar incluyen un pistón o un servomotor.
17. El aparato de la reivindicación 1 en el que cada uno de dichos extremos opuestos del eje está controlado por un solenoide provisto de un árbol que se puede extender y que se puede retraer provisto de un extremo libre que acopla el extremo del eje y el cual se extiende y se retrae de forma deslizante paralelo al eje longitudinal L del limpiador para mover selectivamente el extremo del eje a lo largo de la trayectoria direccional hacia delante y hacia atrás.
18. El aparato de la reivindicación 1 adicionalmente comprendiendo:
una biela de acoplamiento de control de la dirección provista de extremos opuestos,
extremos cada uno de los cuales está articuladamente acoplado a los extremos opuestos del eje; y
un accionamiento de tornillo fijamente conectado a la biela de acoplamiento de control de la dirección y configurado para recibir señales eléctricas desde el control para mover la biela de acoplamiento de control de la dirección lateralmente para dirigir de ese modo los soportes montados de forma giratoria en una dirección seleccionada.
19. El aparato de la reivindicación 18 en el que cada extremo opuesto de la biela de acoplamiento de control de la dirección y cada extremo del eje está acoplado a través de un brazo de la dirección asociado.
20. Un aparato de limpieza robótico autopropulsado para limpiar una superficie sumergida de una piscina o depósito que comprende:
un alojamiento provisto de una parte delantera, una parte trasera opuesta y partes laterales adjuntas que definen la periferia del aparato y una placa base con por lo menos una entrada de agua;
un conjunto de dirección que incluye un soporte montado de forma giratoria acoplado próximo a una de las partes delantera o trasera del alojamiento por una horquilla, dicha horquilla y dicho soporte montado de forma giratoria pudiendo girar simultáneamente alrededor de un eje geométrico central de un eje, el cual está montado en el alojamiento del limpiador; y
un control provisto de una memoria para almacenar un programa de limpieza y un procesador eléctricamente acoplado a la memoria, el programa de limpieza siendo ejecutable por el procesador y pudiendo funcionar para controlar automáticamente el giro del eje para dirigir el aparato de limpieza mientras el limpiador se mueve en una dirección de avance o inversa.
21. El aparato de la reivindicación 20 adicionalmente comprendiendo un solenoide acoplado a la horquilla, dicho solenoide estando eléctricamente acoplado al control y pudiendo funcionar para recibir señales de mandato para girar la horquilla y el soporte montado de forma giratoria.
Patentes similares o relacionadas:
Vehículo de limpieza de piscinas automatizado con elementos de depuración rotatorios y estacionarios, del 15 de Julio de 2020, de Upward Sales Limited: Vehículo de limpieza de piscinas (PCV) completamente sumergible y automatizado para desinfectar el agua de una piscina, donde el PCV comprende: una carcasa […]
Robot de limpieza de piscinas que tiene una unidad de filtrado y un sensor, del 24 de Junio de 2020, de MAYTRONICS LTD.: Un robot de limpieza de piscinas, que comprende: una unidad de filtrado para filtrar fluido que pasa a través de la unidad […]
Robot de limpieza de piscinas con empujes de chorro direccionales, del 10 de Junio de 2020, de MAYTRONICS LTD.: Un limpiador de piscinas que comprende: una carcasa ; un motor de accionamiento que está configurado para ayudar a mover el limpiador […]
Limpiador de piscinas con oruga rodante ajustable para controlar la velocidad del flujo de agua, del 10 de Junio de 2020, de Forever Vanture Technology Limited: Limpiador de piscinas que comprende: una carcasa con una entrada formada en una sección inferior de la misma; […]
Método y aparato para proporcionar señales eléctricas relacionadas con la orientación desde un limpiador robótico de piscinas que tiene un sensor de orientación a una fuente de alimentación remota a través de un cable de dos hilos, del 3 de Junio de 2020, de AQUA PRODUCTS INC.: Método para limpiar una superficie de una piscina con un limpiador robótico de piscinas que tiene un motor eléctrico para mover el limpiador (100, […]
Método para operar un robot de limpieza de piscinas interactivo, del 27 de Mayo de 2020, de MAYTRONICS LTD.: Un método para operar un robot de limpieza de piscinas, el método comprende: recibir, procedente de un usuario y mediante […]
Robot limpiador de piscinas, del 13 de Mayo de 2020, de MAYTRONICS LTD.: Un robot limpiador que comprende: un alojamiento que comprende una entrada de fluido, una salida de fluido, un borde trasero y un borde […]
Dispositivo de lavado para recibir una solución de lavado de una tubería y procedimiento de lavado de la tubería, del 29 de Abril de 2020, de A.P.F. Aqua System AG: Dispositivo de lavado para recibir una solución de lavado de una tubería, en el que el dispositivo de lavado presenta: un elemento base […]