Procedimiento de accionamiento de un conjunto de portaherramientas para plantaciones en línea.
Procedimiento de accionamiento de un conjunto de portaherramientas para plantaciones en línea.
El conjunto de portaherramientas comprende una barra de enganche (1) constituida por dos elementos laterales (13) y (14) simétricos unidos un elemento central (12) a través de un medio de desplazamiento lineal (15, 16) del tipo gato hidráulico y de dos subconjuntos portaherramientas (2) y (3) simétricos. El procedimiento consiste esencialmente en activar las electroválvulas (V1) a (V6) de accionamiento de los gatos hidráulicos (15) y (16) de modo que cualquier detección, por uno de los detectores de posicionamiento (26, 36) del movimiento de repliegue límite predeterminado de uno de los dos brazos (21, 31), accione el desplazamiento, simultáneo, automático y en el mismo sentido, por deslizamiento de los elementos laterales (13, 14) en relación con el elemento central (12), de los portaherramientas (2) y (3) para recentrarlos en relación con el eje (A) de las líneas de plantas (4), manteniendo constante la separación, preestablecida, de dichos portaherramientas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300278.
Solicitante: SARL JEAN-MICHEL EGRETIER.
Nacionalidad solicitante: Francia.
Dirección: 28 Avenue de Toulousse Coursan 11110 FRANCIA.
Inventor/es: EGRETIER,JEAN-MICHEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01B63/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › Dispositivos o disposiciones de elevación o reglaje para máquinas o instrumentos agrícolas (mecanismos de elevación de la barra de corte de una segadora A01D 34/24; dispositivos de reglaje de la barra de corte de una segadora A01D 34/28; características estructurales de los dispositivos de elevación en sí B66F).
Fragmento de la descripción:
PROCEDIMIENTO DE ACCIONAMIENTO DE UN CONJUNTO DE PORTAHERRAMIENTAS PARA PLANTACIONES EN LINEA
Ámbito de la invención
5 La presente invención se refiere al ámbito de los conjuntos portaherramientas para plantaciones en línea y más particularmente para un procedimiento de accionamiento de dichos conjuntos.
Antecedentes de la invención
1.0 . El problema del trabajo del suelo en las plantaciones en línea, en particular la viña, genera continuamente problemas de recentrado de las herramientas en relación con la posición del tractor que se desplaza entre las líneas de plantas.
Este problema se acentúa todavía más, cuando los terrenos están en contrapendiente, pero también en todas las plantaciones para el trabajo de verano, ya que la vegetación está siempre desviada en relación con el alineamiento de las plantas.
15 Desgraciadamente, no existe ningún sistema automático de recentrado de las herramientas que, al mismo tiempo, mantenga constante la separación de dichas herramientas entre sí.
Se conoce la existencia de herramientas entre plantas provistas de un palpador que acciona su repliegue a la derecha de cada planta con el fin de evitar el contacto.
20 Desgraciadamente, sucede que, en función de las separaciones del tractor, este medio de repliegue resulta insuficiente y que el contacto resulte inevitable.
Resumen de la invención
La invención tiene por objeto un procedimiento de accionamiento de un conjunto portaherramientas específico que solucione los inconvenientes arriba mencionados.
Para ello, utiliza un conjunto de portaherramientas que comprende esencialmente:
25 a) una barra de enganche provista de tres puntos de enganche destinados a ser unidos a un aparato portador motorizado y constituido por un elemento central y dos elementos laterales, simétricos, unidos, cada uno, a dicho elemento central, a través de un medio de desplazamiento lineal, del tipo gato hidráulico;
b) dos subconjuntos portaherramientas, simétricos, provistos cada uno:
-de un brazo unido al elemento lateral correspondiente por medio de una articulación específica;
-de una herramienta fijada, de modo intercambiable, al brazo correspondiente;
-de un palpador articulado que, al replegarse al contacto con las plantas, accione un medio de desplazamiento, del tipo gato hidráulico, concebido para hacer pivotar el citado brazo, por lo tanto la herramienta correspondiente, con el fin de evitar cualquier contacto directo de éste con dichas plantas;
c) detectores de posicionamiento de dichos brazos destinados a ser activados cuando el movimiento de repliegue de estos últimos alcance un valor límite predeterminado;
d) un bloque de electroválvulas de accionamiento de los gatos hidráulicos destinados al desplazamiento de los elementos laterales de la barra de enganche.
Según la característica esencial de realización de la invención, el procedimiento consiste en posicionar y en activar las electroválvulas de mando de los gatos hidráulicos destinados a desplazar los elementos laterales de la barra de enganche, de modo que cualquier detección, por uno de los detectores de posicionamiento, del movimiento de repliegue límite predeterminado de uno de los dos brazos, accione el desplazamiento, simultáneo, automático y en el mismo sentido, por deslizamiento sobre la barra de enganche, de los portaherramientas de modo a recentrarlos en relación con el eje de las líneas de plantas, manteniendo al mismo tiempo constante la separación, predeterminada, de dichos dos portaherram ientas.
Según otra particularidad esencial de realización de la invención, el desplazamiento simultáneo, automático de los portaherramientas, se produce como complemento y en el momento preciso en el que el palpador, al provocar el repliegue autónomo de uno de los dos portaherramientas, se encuentra con dificultad para evitar el contacto de la herramienta que maneja con la planta debido al mal posicionamiento de los portaherramientas en relación con el eje de las líneas de plantas.
Presentación de las figuras Las características y ventajas de la invención aparecerán más claramente con la lectura de la descripción detallada siguiente de al menos un modo de realización preferido de ésta, dado a título de ejemplo no limitativo y representado en los dibujos adjuntos.
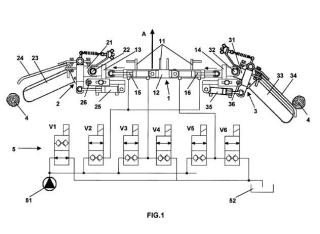
En estos dibujos, la figura 1 (figura única) representa el conjunto de portaherramientas según la invención con su bloque de electroválvulas de accionamiento.
Descripción detallada de la invención El conjunto portaherramientas representado en la figura única comprende:
a) una barra de enganche (1) provista de tres puntos de enganche (11) destinados a ser unidos a un aparato portador motorizado y constituido por un elemento central (12) y dos elementos laterales (13) y (14) , simétricos, unidos, cada uno, a dicho elemento central (12) , a través de un medio de desplazamiento lineal (15, 16) , del tipo gato hidráulico;
b) dos subconjuntos portaherramientas (2) y (3) simétricos, provistos, cada uno:
-de un brazo (21, 31) unido al elemento lateral (13, 14) correspondiente por medio de una articulación (22, 32) ;
-de una herramienta (23, 33) fijada, de modo intercambiable, en el brazo (21, 31) correspondiente;
-de un palpador articulado (24, 34) que, al replegarse al contacto con las plantas (4) , acciona un medio de desplazamiento (25, 35) , del tipo gato hidráulico, concebido para hacer pivotar el brazo (21, 31) correspondiente y por lo tanto la herramienta (23, 33) correspondiente, con el fin de evitar cualquier contacto directo de ésta con dichas plantas (4) ;
c) detectores de posicionamiento (26) y (36) de los brazos (21) y (31) destinados a ser activados cuando el movimiento de repliegue de dichos brazos alcance un valor límite predeterminado;
d) un bloque (5) de electroválvulas de accionamiento (V1) a (V6) de los gatos hidráulicos (15) Y (16) .
El procedimiento de accionamiento de dicho conjunto consiste en activar las electroválvulas (V1) a (V6) de accionamiento de los gatos hidráulicos (15) y (16) de modo que cualquier detección, por uno de los detectores de posicionamiento (26, 36) , del movimiento de repliegue límite predeterminado de uno de los dos brazos (21, 31) , accione el desplazamiento, simultáneo, automático y en el mismo sentido, por deslizamiento sobre la barra de enganche (1) , de los portaherramientas (2) y (3) de modo a recentrarlos con relación al eje (a) de las líneas de plantas (4) , manteniendo al mismo tiempo constante la separación, preestablecida, de dichos dos portaherramientas.
El desplazamiento simultáneo, automático de los portaherramientas (2) y (3) , se produce como complemento y en el momento preciso en el que el palpador (24, 34) , al provocar el repliegue autónomo (24, 34) de uno de los dos portaherramientas (2, 3) , se encuentre con dificultad para evitar el contacto de la herramienta que maneja con la planta (4) debido al mal posicionamiento de los portaherramientas (2) y (3) en relación con el eje (a) de las líneas de plantas (4) .
El desplazamiento, simultáneo, automático y en el mismo sentido, de los portaherramientas (2) y (3) se obtiene accionando las electroválvulas (V1) a (V6) de modo que el fluido hidráulico expulsado del lado de la varilla del gato repelido es empujado al lado de la varilla del gato opuesto.
El desplazamiento, simultáneo, automático, hacia la izquierda, de los portaherramientas (2) y (3) , se obtiene accionando las electroválvulas (V1) , (V3) y (V6) .
En la figura, el portaherramientas es el que está en posición límite y el conjunto (1, 2, 3) está desviado hacia la derecha del eje (A) . Esta posición es detectada por el detector de posicionamiento (36) que acciona las electroválvulas (V1) , (V3) y (V6) para restablecer automáticamente el centrado de dicho conjunto.
El desplazamiento, simultáneo, automático, hacia la derecha, de los portaherramientas (2) y (3) , se obtiene accionando las electroválvulas (V1) , (V4) y (V5) .
Según particularidades de accionamiento de los gatos (15) y (16) :
-el accionamiento simultáneo de las electroválvulas (V1) , (V2) y (V3) , provoca el despliegue del gato (15) ;
-el accionamiento simultáneo de las electroválvulas (V1) , (V2) y (V5) provoca el despliegue del gato (16) ;
-el accionamiento simultáneo de las electroválvulas (V1) , (V2) y (V4) , provoca el repliegue del gato (15) ;
-el accionamiento simultáneo de las electroválvulas (V1) , (V2) y (V6) , provoca el repliegue del gato (16) .
La válvula (V1) ha sido introducida para permitir que el circuito hidráulico gire en vacío (sin presión) cuando no...
Reivindicaciones:
1. Procedimiento de accionamiento de un conjunto de portaherramientas para plantaciones en línea que comprende:
a) una barra de enganche (1) provista de tres puntos de enganche (11) destinados a ser unidos a un aparato portador motorizado y constituida por un elemento central (12) y dos elementos laterales (13) y (14) , simétricos, unidos, cada uno, a dicho elemento central (12) , a través de un medio de desplazamiento lineal (15, 16) , del tipo gato hidráulico;
b) dos subconjuntos portaherramientas (2) y (3) , simétricos, provistos, cada uno de:
-un brazo (21, 31) unido al elemento lateral (13, 14) correspondiente por medio de una articulación (22, 32) ;
-una herramienta (23, 33) fijada, de modo intercambiable, al brazo (21, 31) correspondiente;
-un palpador articulado (24, 34) que, al replegarse en contacto con las plantas (4) , acciona un medio de desplazamiento (25, 35) , del tipo gato hidráulico, concebido para hacer pivotar el brazo (21, 31) correspondiente y por lo tanto la herramienta (23, 33) correspondiente, con el fin de evitar cualquier contacto directo de ésta con dichas plantas (4) ;
c) detectores de posicionamiento (26) y (36) brazos (21) y (31) destinados a ser activados cuando el movimiento de repliegue de dichos brazos alcance un valor límite predeterminado;
d) un bloque (5) de electroválvulas de accionamiento (V1) a (V6) de los gatos hidráulicos (15) Y (16) ;
caracterizado porque consiste en activar las electroválvulas (V1) a (V6) de accionamiento de los gatos hidráulicos (15) y (16) de modo tal que cualquier detección por uno de los detectores de posicionamiento (26, 36) del movimiento de repliegue límite predeterminado de uno de los dos brazos (21, 31) accione el desplazamiento, simultáneo, automático y en el mismo sentido, por deslizamiento de los elementos laterales (13, 14) en relación con el elemento central (12) , de los portaherramientas (2) y (3) para recentrarlos en relación con el eje (A) de las líneas de plantas (4) , manteniendo al mismo tiempo constante la separación, preestablecida, de dichos dos portaherramientas.
2. Procedimiento, según la reivindicación 1, caracterizado porque consiste en activar las electroválvulas (V1) a (V6) de accionamiento de los gatos hidráulicos (15) y (16) de modo que se obtiene el desplazamiento, simultáneo y automático, de los portaherramientas (2) y (3) , como complemento y en el momento preciso en el que el palpador (24, 34) , al provocar el repliegue autónomo (24, 34) de uno de los dos portaherramientas (2, 3) , se encuentra con dificultades para evitar el contacto de la herramienta que maneja con la planta (4) debido a un mal posicionamiento de los portaherramientas (2) y (3) en relación con el eje (A) de las líneas de plantas (4) .
3. Procedimiento, según la reivindicación 1, caracterizado porque consiste en activar las electroválvulas (V1) a (V6) de accionamiento de los gatos hidráulicos (15) y (16) de modo que se obtiene el desplazamiento, simultáneo, automático y en el mismo sentido, de los portaherramientas (2) y (3) de modo que el fluido hidráulico repelido del lado de la varilla del gato es empujado al lado de la varilla del gato opuesto.
4. Procedimiento, según la reivindicación 2, caracterizado porque consiste en activar las electroválvulas (V1) , (V3) y (V6) de accionamiento de los gatos hidráulicos (15) y (16) para obtener el desplazamiento, simultáneo y automático, hacia la izquierda, de los portaherramientas (2) y (3) .
5. Procedimiento, según la reivindicación 2, caracterizado porque consiste en activar las electroválvulas (V1) , (V4) y (V5) de accionamiento de los gatos hidráulicos (15) y (16) para obtener el desplazamiento, simultáneo y automático, hacia la derecha, de los portaherramientas (2) y (3) .
6. Procedimiento, según la reivindicación 1, caracterizado porque consiste en:
-accionar simultáneamente las electroválvulas (V1) , (V2) y (V3) , para provocar el despliegue del gato (15) ;
-accionar simultáneamente las electroválvulas (V1) , (V2) y (V5) , para provocar el despliegue del gato (16) ;
-accionar simultáneamente las electroválvulas (V1) , (V2) y (V4) , para provocar el repliegue del gato (15) ; y
-accionar simultáneamente las electroválvulas (V1) , (V2) y (V6) , para provocar el repliegue del gato (16) .
<O
~
52 FIG.1
Patentes similares o relacionadas:
Dispositivo de acolchado con martillo y segadora de hoz, del 20 de Noviembre de 2019, de Fischer Maschinenbau GmbH & Co. KG: Dispositivo de acolchado que comprende una segadora de mayales que tiene una barra del rotor que puede girar alrededor de un eje del rotor […]
VEHÍCULO DE MOTOR DE BANDA MÚLTIPLES ARTICULADO PARA USO CON DIFERENTES TIPOS DE HERRAMIENTAS EN EL CAMPO AGRÍCOLA, del 1 de Agosto de 2019, de SOLOWEY DOMENE, Sergio Román: Un vehículo de motor de banda múltiples articulado para uso con diferentes tipos de herramientas en el campo agrícola que comprende un conjunto motriz y un conjunto de […]
Sistema de arado, del 19 de Junio de 2019, de Kuhn- Huard S.A.S: Sistema de arado que comprende: i) un bastidor de arado , comprendiendo dicho bastidor de arado unos medios de acoplamiento para acoplar dicho bastidor de […]
Sistema de fijación para un apero, del 18 de Diciembre de 2018, de Kverneland Group Operations Norway AS: Un sistema de fijación para un apero que está dispuesto para conectarse, al menos en una posición de trabajo, a un enlace de apero de tres puntos en un portador […]
Arado con un dispositivo para levantar por lo menos una cama de arado, del 4 de Abril de 2018, de KUHN-HUARD S.A.: Arado que presenta un bastidor en el que está montada por lo menos una cama de arado por medio de una carcasa respectiva , comprendiendo la cama de arado […]
Sembradora monograno con ruedas gemelas, del 20 de Abril de 2016, de KUHN S.A.: Sembradora monograno que comprende un chasis telescópico de anchura variable, por lo menos dos ruedas portadoras , unos elementos sembradores […]
Bastidor para una sembradora de cereales y sembradora de cereales que incluye dicho bastidor, del 3 de Febrero de 2016, de MAQUINARIA AGRICOLA SOLA, S.L.: Bastidor para una sembradora de cereales del tipo de las que las semillas son distribuidas desde la tolva hasta el surco por gravedad, que comprende […]
Procedimiento y sistema para procesar información relativa a un vehículo, del 1 de Abril de 2015, de DQUID S.R.L: Sistema para procesar información relativa a un vehículo que comprende una o más unidades de control electrónico que pueden conectarse entre […]