SISTEMA Y MÉTODO DE MEDIDA DE FUERZAS APLICABLE A LA MEDIDA DE LA FUERZA APLICADA A UN SISTEMA MECÁNICO, Y PIEZA DE ANCLAJE CON SISTEMA DE MEDIDA INTEGRADO.
Sistema y método de medida de fuerzas aplicable a la medida de la fuerza aplicada a un sistema mecánico,
y pieza de anclaje con sistema de medida integrado.
El método comprende:
a) detectar las deformaciones sufridas por unas zonas de una estructura de soporte causadas por una fuerza de tracción;
b) analizar unos valores de detección, correspondientes a dichas deformaciones detectadas, para determinar, de manera unívoca, la magnitud y la dirección de tiro de dicha fuerza de tracción, mediante el procesado de dichos valores de detección, obtenidos en un momento dado, en relación con unos valores de deformación registrados previamente para una pluralidad de fuerzas de tracción diferentes.
El sistema comprende unos sensores de deformación (G1, G2) y un sistema electrónico en conexión con los que incluye una serie de elementos previstos para implementar el método propuesto.
La pieza de anclaje incluye un sistema como el propuesto.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200902240.
Solicitante: CENTRE INTERNACIONAL DE METODES NUMERICS EN ENGINYERIA.
Nacionalidad solicitante: España.
Inventor/es: GARCÍA ESPINOSA,JULIO, FERNÁNDEZ ALONSO,ALBERTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B21/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 21/00 Aparatos de maniobra; Aparatos de desplazamiento, remolque o empuje; Anclaje (anclaje dinámico B63H 25/00; equipos para embarque en costas, puertos o en otras estructuras marinas fijas, p.ej. para aterrizaje, E02B). › Dispositivos de bloqueo.
- G01L5/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 5/00 Aparatos o métodos para la medida de fuerzas, del trabajo, de la potencia mecánica o del par, especialmente adaptados a fines específicos. › para medir la tensión en los cordajes, cables, hilos metálicos, correas o bandas.
Fragmento de la descripción:
Sistema y método de medida de fuerzas aplicable a la medida de la fuerza aplicada a un sistema mecánico, y pieza de anclaje con sistema de medida integrado.
Sector de la técnica
La presente invención concierne, en general, en un primer y un segundo aspectos, a un sistema y a un método de medida de fuerzas aplicable a la medida de la fuerza aplicada a un sistema mecánico, mediante la utilización de unos sensores de deformación dispuestos en una estructura de soporte de dicho sistema mecánico, y en particular a un sistema y un método que permiten determinar la magnitud y la dirección de tracción de dicha fuerza aplicada.
Un tercer aspecto de la invención concierne a una pieza de anclaje con sistema de medida integrado, que permite determinar la magnitud y la dirección de la fuerza aplicada sobre la misma.
Estado de la técnica anterior
Son conocidos diversos sistemas para medir las fuerzas de tracción aplicadas sobre un sistema mecánico, que comprenden uno o más sensores de deformación dispuestos sobre diferentes elementos del sistema mecánico.
Por el documento de patente GB2136582A se conoce un sistema de medida que incluye una galga extensiométrica dispuesta sobre el eje de una polea con el fin de medir la deformación sufrida por el mismo, y a partir de esta deformación inferir la tensión que sufre el cable que pasa por la polea.
En la solicitud EP2017594A2 también se propone un sistema que incluye una galga extensiométrica dispuesta sobre un eje fijo de una polea con el fin de medir la fuerza aplicada sobre un cable que pasa por la misma.
En la patente GB2089053 se propone un sistema de medida de la carga que actúa sobre una polea, que comprende varias galgas extensiométricas dispuestas en diferentes puntos de una estructura fija de soporte en la cual se encuentra fijado el eje de una polea. Con tal disposición se pretende superar los inconvenientes de los que adolecen las disposiciones de galgas sobre el eje de la polea, en particular los relativos a la necesidad de cambiar el eje por otro, lo que implica que sea necesario retirar las galgas y volverlas a colocar en el nuevo eje, reconfigurarlas, etc.
En la patente FR2923293 se propone una polea con una estructura de soporte, en particular instalada en un barco de vela, en la cual se encuentran dispuestas una o más galgas extensiométricas, para medir la fuerza de tracción aplicada sobre la misma a partir de las deformaciones detectadas. La polea propuesta comprende un sistema electrónico local, fijado a la estructura de soporte, y conectado a las galgas para el tratamiento de las señales provinentes de las mismas y el envío de las señales tratadas, de manera inalámbrica, a un receptor de una unidad central de tratamiento y cálculo. No se indica en dicha patente que la mencionada unidad central de tratamiento y cálculo esté prevista, ni implemente ninguna metodología, que permita determinar la dirección de tiro o tracción de la fuerza aplicada a partir de las señales provinentes de las galgas.
En la patente EP0236955B1 se propone un método para medir de manera continua el ángulo, respecto a un eje fijo vertical paralelo al plano de crujía del barco, y la tensión longitudinal de un cable cuando pasa por una polea con un eje fijo montado sobre la proa o la popa de un barco, durante la instalación de un cable eléctrico pesado en un lecho marítimo desde dicho barco, a través de dicha polea. Dicha tensión y dicho ángulo se calculan a partir de varios parámetros, incluyendo la aceleración y la masa del cable, del giro de la polea, la inercia de giro, la rigidez del cable, las pérdidas por fricción, así como a partir de la medida de la fuerza ejercida sobre el eje fijo de la polea, en particular y por lo que se refiere al ángulo a partir de las componentes horizontal y vertical de dicha fuerza, medidas por ejemplo mediante unas galgas extensiométricas dispuestas en el eje de manera ortogonal entre sí: una para medir la componente horizontal y la otra para medir la componente vertical. La disposición de las galgas en el eje de la polea tiene las desventajas comentadas anteriormente.
Explicación de la invención
Aparece necesario ofrecer una alternativa al estado de la técnica que cubra las lagunas halladas en el mismo, en particular las referentes a la determinación de la magnitud de la fuerza de tracción ejercida sobre un sistema mecánico, tal como un arraigo, por parte de un sistema o elemento de tracción, así como también de la dirección de tiro o tracción con el cual ésta es ejercida, sin la limitación de que esa dirección esté en una dirección determinada del espacio, como en el caso de EP0236955B1, o sin la necesidad de utilizar un sistema complejo de sensores como el de EP0236955B1, y que permita determinar tanto la magnitud como la dirección de tiro de manera unívoca, utilizando solamente unos sensores de deformación dispuestos en distintas zonas de una estructura de soporte, que no incluyen el eje de una polea.
Para ello la presente invención concierne, en un primer aspecto, a un sistema de medida de fuerzas aplicable a la medida de magnitud y dirección de la fuerza aplicada a un sistema mecánico, donde dicho sistema mecánico comprende, como mínimo, una estructura de soporte susceptible de deformación y un sistema de tracción conectado a dicha estructura de soporte que transmite una fuerza de tracción a dicha estructura de soporte.
El sistema de medida de fuerzas propuesto por el primer aspecto de la invención comprende, de manera en sí conocida:
- dos o más sensores de deformación fijados a dos o más respectivas zonas de dicha estructura de soporte para detectar la deformación de cada una de dichas zonas como resultado de la acción de dicha fuerza de tracción transmitida por dicho sistema de tracción a la estructura de soporte; y
- un sistema electrónico en conexión con dichos sensores de deformación para recibir unas señales de salida de los mismos y determinar la magnitud de dicha fuerza de tracción, en función de las deformaciones detectadas.
A diferencia de los sistemas de medida convencionales citados en el apartado anterior, en el sistema de medida propuesto por la presente invención el mencionado sistema electrónico comprende:
- una o más memorias donde se encuentran registradas las relaciones entre unos valores de señales de salida de dichos sensores de deformación y unos valores de una pluralidad de fuerzas de tracción diferentes, en magnitud y en dirección de tiro o tracción, respecto a un sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, para los cuales dichos valores de señales de salida registrados han sido obtenidos previamente, así como donde también se encuentran registrados los valores incluidos en dichas relaciones, y
- una unidad de procesamiento en conexión con dicha memoria y con dichos sensores de deformación, y prevista para procesar las señales de salida de al menos dichos sensores de deformación, recibidas por el sistema electrónico en un momento dado, en relación con dichos valores registrados, para determinar dicha magnitud de dicha fuerza de tracción y también, de manera unívoca, la dirección de tiro o tracción, respecto a dicho sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, de la fuerza de tracción a la que es sometida dicha estructura de soporte.
El sistema de medida propuesto está adaptado para determinar la referida dirección de tracción tanto cuando está determinada por un sólo ángulo (por ejemplo cuando la fuerza se ejerce siempre en un plano vertical) como cuando incluye dos ángulos (por ejemplo uno sobre un plano horizontal y otro respecto a la vertical).
Según un ejemplo de realización al menos parte de los sensores de deformación se encuentran orientados según vectores distintos entre sí, de manera que se puedan detectar deformaciones en zonas distintas de la estructura de soporte según varias orientaciones.
En general el sistema de medida propuesto es un sistema de medida continua.
Para un ejemplo de realización el sistema de medida propuesto por el primer aspecto de la invención, está aplicado a un sistema mecánico cuyo sistema de tracción comprende una o más poleas.
El mencionado sistema electrónico se encuentra dividido, para un ejemplo de realización, en una unidad local, dispuesta sobre o próxima a la estructura de soporte,...
Reivindicaciones:
1. Sistema de medida de fuerzas aplicable a la medida de la fuerza aplicada a un sistema mecánico, donde dicho sistema mecánico comprende:
- al menos una estructura de soporte susceptible de deformación;
- al menos un sistema de tracción conectado a dicha estructura de soporte, que es al menos una, para transmitir una fuerza de tracción a dicha estructura de soporte; donde dicho sistema de medida de fuerzas comprende:
- al menos dos sensores de deformación (G1, G2) fijados a dos respectivas zonas de dicha estructura de soporte, que es al menos una, para detectar la deformación de cada una de dichas dos zonas como resultado de la acción de dicha fuerza de tracción transmitida por dicho sistema de tracción a dicha estructura de soporte, que es al menos una;
- un sistema electrónico en conexión con dichos sensores de deformación (G1, G2), que son al menos dos, para recibir unas señales de salida de dichos sensores de deformación (G1, G2) y determinar la magnitud de dicha fuerza de tracción, en función de las deformaciones detectadas,
estando dicho sistema de medida caracterizado porque dicho sistema electrónico comprende:
- al menos una memoria en la que se encuentran registrados unos valores de señales de salida de dichos sensores de deformación (G1, G2) correlacionados con unos valores de una pluralidad de fuerzas de tracción diferentes, en magnitud y en dirección de tiro o tracción, respecto a un mismo sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, para los cuales dichos valores de señales de salida registrados han sido obtenidos previamente, y
- una unidad de procesamiento en conexión con dicha memoria y con dichos sensores de deformación, y prevista para procesar las señales de salida de al menos dichos sensores de deformación (G1, G2), recibidas por el sistema electrónico en un momento dado, en relación con dichos valores registrados, para determinar dicha magnitud de dicha fuerza de tracción y también, de manera unívoca, la dirección de tiro o tracción, respecto a dicho sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, de la fuerza de tracción a la que es sometida dicha estructura de soporte.
2. Sistema según la reivindicación 1, caracterizado porque al menos parte de dichos sensores de deformación (G1, G2) se encuentran orientados según vectores distintos entre sí.
3. Sistema de medida según la reivindicación 1 ó 2, caracterizado porque está aplicado a un sistema mecánico cuyo sistema de tracción comprende al menos una polea (3).
4. Sistema de medida según la reivindicación 3, caracterizado porque está aplicado a un sistema mecánico cuya estructura de soporte es una pieza de soporte (1) del eje (3a) de dicha polea (3).
5. Sistema de medida según la reivindicación 4, caracterizado porque está aplicado a un sistema mecánico en el cual dicha pieza de soporte (1) comprende dos paredes (1a, 1b), cada una de ellas fijada a un respectivo extremo de dicho eje (3a), quedando dicha polea (3) dispuesta entre dichas dos paredes (1a, 1b), y porque dichos dos sensores de deformación (G1, G2) se encuentran fijados a dos respectivas zonas de una cara plana de una de dicha paredes (1a, 1b), orientados de manera no alineada entre sí, o a cada una de dos respectivas zonas de dos correspondientes caras planas de dichas dos paredes (1a, 1b).
6. Sistema de medida según la reivindicación 5, caracterizado porque comprende al menos un tercer sensor de deformación (G3) fijado a otra zona de dicha cara plana de dicha pared (1a, 1b), orientada no paralelamente respecto a los otros dos sensores de deformación (G1, G2), y porque dicha memoria, que es al menos una, tiene registrados unos valores de señales de salida de dicho tercer sensor de deformación (G3), obtenidos previamente para dicha pluralidad de fuerzas de tracción diferentes, y porque dicha unidad de procesamiento también está en conexión con dicho tercer sensor de deformación (G3), y prevista para comparar también las señales de salida de la misma con dichos valores registrados, para llevar a cabo dicha determinación de la magnitud y dirección de tiro de la fuerza de tracción a la que es sometida la pieza de soporte (1).
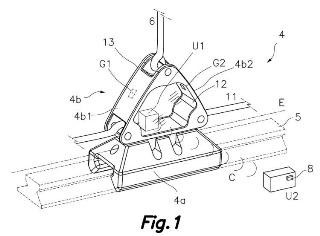
7. Sistema de medida según la reivindicación 1, 2 ó 3, caracterizado porque está aplicado a un sistema mecánico sometido a tracción en el cual dicha estructura de soporte comprende una pieza de anclaje (4) con al menos una primera parte (4b) unida a una estructura fija, donde dicha primera parte (4b) comprende al menos dos paredes (4b1, 4b2) unidas por un extremo a un elemento en conexión con un elemento de tracción (6) de dicho sistema de tracción, y porque cada uno de dichos dos sensores de deformación (G1, G2) se encuentra fijado a una cara plana de una respectiva de dichas dos paredes (4b1, 4b2).
8. Sistema de medida según la reivindicación 7, caracterizado porque está aplicado a un sistema mecánico sometido a tracción en el cual dicha pieza de anclaje (4) es un arraigo, y porque comprende una segunda parte (4a) unida a dicha estructura fija y a dicha primera parte (4b) de manera que la primera parte (4b) es desplazable respecto a dicha segunda parte (4a) según al menos un grado de libertad.
9. Sistema de medida según cualquiera de las reivindicaciones anteriores, caracterizado porque dicho sistema electrónico se encuentra dividido en al menos una unidad local (U1), dispuesta sobre o próxima a dicha estructura de soporte, y una unidad remota (U2), estando ambas unidades (U1, U2) comunicadas entre sí a través de una vía de comunicación inalámbrica (C) o vía cable.
10. Sistema de medida según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende una carcasa (7a, 7b) fijada a dicha estructura de soporte y que alberga en su interior a al menos parte (U1) de dicho sistema electrónico.
11. Sistema de medida según una cualquiera de las reivindicaciones 1 a 9, caracterizado porque está aplicada a un sistema mecánico sometido a tracción en el cual parte de dicha estructura de soporte constituye un alojamiento para al menos parte (U1) de dicho sistema electrónico.
12. Sistema de medida según cualquiera de las reivindicaciones anteriores, caracterizado porque dicho sistema electrónico comprende unos medios de indicación visual (8) previstos para mostrar unas señales visuales, representativas de la fuerza de tracción determinada por dicha unidad de procesamiento.
13. Sistema de medida según la reivindicación 1, caracterizado porque dicho sistema de tracción es o comprende al menos un elemento de tracción (6) del grupo que incluye los siguientes elementos de tracción: un cable, una cuerda, una cadena y una barra.
14. Sistema de medida según cualquiera de las reivindicaciones anteriores, caracterizado porque está aplicado a la medida de la fuerza aplicada a un sistema mecánico que forma parte de una jarcia de un barco de vela.
15. Método de medida de fuerzas aplicable a la medida de la fuerza aplicada a un sistema mecánico, del tipo que comprende:
a) detectar las deformaciones sufridas por al menos dos respectivas zonas de una estructura de soporte causadas por una fuerza de tracción ejercida por parte de un sistema de tracción conectado a dicha estructura de soporte;
b) analizar unos valores de detección, correspondientes a dichas deformaciones detectadas, para determinar la magnitud de dicha fuerza de tracción ejercida, estando dicho método caracterizado porque dicha etapa b) comprende procesar dichos valores de detección, obtenidos en un momento dado, en relación con unos valores de detección, teóricos, u obtenidos por cálculo numérico, y/o experimentales, registrados previamente correlacionados con unos valores de una pluralidad de fuerzas de tracción diferentes, en magnitud y en dirección de tiro o tracción, respecto a un mismo sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, para determinar dicha magnitud de dicha fuerza de tracción y también, de manera unívoca, la dirección de tiro o tracción, respecto a dicho sistema de referencia determinado, de la fuerza de tracción a la que es sometida dicha estructura de soporte en dicho momento dado.
16. Método según la reivindicación 15, caracterizado porque dicha etapa a) comprende detectar deformaciones según al menos dos vectores con orientaciones distintas entre sí.
17. Método según la reivindicación 15 ó 16, caracterizado porque comprende obtener dichos valores de detección para llevar a cabo dicho registro previo de los mismos, únicamente para un rango de aplicación determinado que abarca unos determinados valores de detección de deformaciones y de fuerzas de tracción, en magnitud y dirección de tiro.
18. Método según la reivindicación 17, caracterizado porque cuando dichos valores de deformaciones detectadas en dicha etapa a) se encuentran incluidos en dichos valores de detección registrados, el método comprende determinar dicha fuerza de tracción ejercida en dicho momento dado, tanto por lo que se refiere a su magnitud como a su dirección de tiro, correlacionando los valores detectados en dicho momento dado con los registrados.
19. Método según la reivindicación 18, caracterizado porque cuando dichos valores de deformaciones detectadas en dicha etapa a) no se encuentran incluidos en dichos valores de detección registrados para dicho rango de aplicación determinado, el método comprende determinar dicha fuerza de tracción ejercida en dicho momento dado, tanto por lo que se refiere a su magnitud como a su dirección de tiro, mediante la utilización de un método de interpolación, extrapolación o predicción basado en dichos valores de detección registrados correlacionados.
20. Método según la reivindicación 15, caracterizado porque dicho procesamiento de dicha etapa b) comprende ejecutar un algoritmo que implementa una red neuronal, tomando como datos de entrada dichos valores de detección obtenidos en un momento dado.
21. Método según la reivindicación 20, caracterizado porque comprende entrenar y validar a dicha red neuronal a partir de al menos dichos valores de detección, teóricos, u obtenidos por cálculo numérico, y/o experimentales, registrados previamente.
22. Pieza de anclaje con sistema de medida integrado, donde dicho sistema de medida comprende:
- al menos dos sensores de deformación (G1, G2) fijados a dos respectivas zonas de dicha pieza de anclaje (4), orientados de manera no alineada entre sí, para detectar la deformación de cada una de dichas dos zonas como resultado de la acción de una fuerza de tracción transmitida por un sistema de tracción conectado a dicha pieza de anclaje (4);
- al menos una parte (U1) de un sistema electrónico dispuesto en dicha pieza de anclaje (4) y en conexión con dichos sensores de deformación (G1, G2), que son al menos dos, para recibir unas señales de salida de dichos sensores de deformación (G1, G2) y determinar la magnitud de dicha fuerza de tracción, en función de las deformaciones detectadas,
estando dicha pieza de anclaje caracterizada porque comprende al menos una primera parte (4b) prevista para su unión a una estructura fija, donde dicha primera parte (4b) comprende al menos dos paredes (4b1, 4b2) que incluyen a dichas dos respectivas zonas de la pieza de anclaje (4) y que están previstas para su unión por un extremo a un elemento en conexión con un elemento de tracción (6) de dicho sistema de tracción, y porque la pieza de anclaje (4) define un alojamiento cerrado que alberga en su interior a al menos dicha parte (U1) de dicho sistema electrónico, el cual comprende:
- al menos una memoria en la que se encuentran registrados unos valores de señales de salida de dichos sensores de deformación (G1, G2) correlacionados con unos valores de una pluralidad de fuerzas de tracción diferentes, en magnitud y en dirección de tiro o tracción, respecto a un mismo sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, para los cuales dichos valores de señales de salida registrados han sido obtenidos previamente, y
- una unidad de procesamiento en conexión con dicha memoria y con dichos sensores de deformación, y prevista para procesar las señales de salida de al menos dichos sensores de deformación (G1, G2), recibidas por el sistema electrónico en un momento dado, en relación con dichos valores registrados, para determinar dicha magnitud de dicha fuerza de tracción y también, de manera unívoca, la dirección de tiro o tracción, respecto a un mismo sistema de referencia determinado, o vector o ángulo en el plano de trabajo del sistema de tracción, de la fuerza de tracción a la que es sometida dicha pieza de anclaje (4).
Patentes similares o relacionadas:
CÉLULA DE CARGA, del 29 de Agosto de 2019, de DINACELL ELECTRONICA, S.L.: Una célula de carga desensamblable de un cable cinta de suspensión sometido a una tensión producto de una carga suspendida; comprendiendo un cuerpo de célula […]
Conjuntos de sensores de fuerza de tela elásticamente extensible y procedimientos de fabricación, del 12 de Marzo de 2019, de PatienTech LLC: Un transductor de detección de fuerza para medir fuerza ejercida sobre él, comprendiendo dicho transductor: a. un hilo […]
Análisis de elementos de soporte de carga, del 12 de Noviembre de 2018, de Pfeifer Seil- und Hebetechnik GmbH: Procedimiento de análisis de un elemento de soporte de carga de una estructura arquitectónica, comprendiendo el procedimiento proporcionar el elemento de soporte […]
Procedimiento y dispositivo para la medición de la planeidad de cintas, del 28 de Septiembre de 2016, de BWG BERGWERK- UND WALZWERK-MASCHINENBAU GMBH: Rodillo de medición para la medición de la planeidad de cintas movidas en una dirección de marcha de cinta (x), especialmente de cintas metálicas al pasar […]
Dispositivo para medir la fuerza de la cadena en una bicicleta, del 27 de Abril de 2016, de BHBIKES EUROPE, S.L: Dispositivo para medir la fuerza de la cadena en una bicicleta, el cual comprende una placa metálica , en el cual dicha placa metálica comprende: […]
 Sistema de monitorización para medida de la velocidad y de la elongación de cadenas de transporte, del 16 de Marzo de 2016, de Rexnord Flattop Europe S.r.l: Un sistema de monitorización para una cinta transportadora de artículos (100; 100(j)), comprendiendo dicha cinta transportadora de artículos una porción estática y al menos […]
Sistema de monitorización para medida de la velocidad y de la elongación de cadenas de transporte, del 16 de Marzo de 2016, de Rexnord Flattop Europe S.r.l: Un sistema de monitorización para una cinta transportadora de artículos (100; 100(j)), comprendiendo dicha cinta transportadora de artículos una porción estática y al menos […]
 DISPOSITIVO DE CONTROL DE LA TENSIÓN DE CABLES, del 22 de Septiembre de 2015, de LIFT SENSOR, S.L: 1. Dispositivo de control de la tensión de cables, que comprende un sensor de presión dispuesto en apoyo sobre una estructura de sujeción, estableciéndose el cable […]
DISPOSITIVO DE CONTROL DE LA TENSIÓN DE CABLES, del 22 de Septiembre de 2015, de LIFT SENSOR, S.L: 1. Dispositivo de control de la tensión de cables, que comprende un sensor de presión dispuesto en apoyo sobre una estructura de sujeción, estableciéndose el cable […]
APARATO PARA LA MONITORIZACIÓN DE CABLES AÉREOS, del 25 de Julio de 2013, de GOLAY CODING MODULATION, S.L: La invención a la que se refiere la presente memoria trata de un aparato para la monitorización de cables aéreos que, instalado en uno de los extremos […]