SISTEMA INTEGRADO DE TELEDETECCIÓN MEDIOAMBIENTAL MARINA BASADO EN PLATAFORMAS AUTÓNOMAS.
Sistema integrado de teledetección medioambiental marina basado en plataformas autónomas que comprende al menos tres unidades,
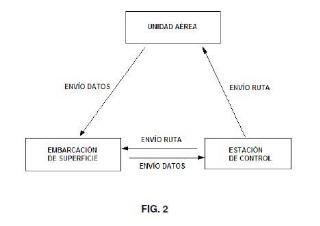
que son una unidad aérea no tripulada, una embarcación de superficie no tripulada y una estación de control. La clave del sistema es la conjunción y la interacción entre sí de las plataformas no tripuladas. La estación de control emite ordenes operativas a la unidad aérea y a la embarcación de superficie que a su vez determinan su posición mediante GPS, obtienen los datos de las variables biofísicas a estudiar y los mandan a la estación de control para su procesado y análisis.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230730.
Solicitante: UNIVERSIDAD POLITECNICA DE CARTAGENA.
Nacionalidad solicitante: España.
Inventor/es: MOLINA MARTINEZ,JOSE MIGUEL, GARCÍA FERNÁNDEZ-PACHECO,DANIEL, RUIZ PEÑALVER,LEANDRO, VAZQUEZ LEON,ANGEL LUIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01N33/18 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 33/00 Investigación o análisis de materiales por métodos específicos no cubiertos por los grupos G01N 1/00 - G01N 31/00. › agua.
- G08C17/00 G […] › G08 SEÑALIZACION. › G08C SISTEMAS DE TRANSMISION DE VALORES MEDIDOS, SEÑALES DE CONTROL O SIMILARES (sistemas de transmisión con presión de fluido F15B; medios mecánicos para convertir la salida de un órgano sensible en otra variable G01D 5/00; sistemas de control mecánico G05G). › Disposiciones para transmitir señales caracterizadas por la utilización de una vía eléctrica sin hilo.
Fragmento de la descripción:
Sistema integrado de teledetección medioambiental marina basado en plataformas autónomas
La presente invención se enmarca dentro de los sistemas de toma y análisis de parámetros biofísicos en el mar. 6 ESTADO DE LA TÉCNICA ANTERIOR
Entre los diversos aspectos que estudia la oceanografía costera cabe destacar la variabilidad temporal y espacial de los parámetros biofísicos, las relaciones entre procesos oceanográficos y recursos vivos (efectos antrópicos sobre el ecosistema costero) , la presencia de organismos marinos nocivos y la batimetría del fondo marino.
12 Hoy en día se utilizan tanto la detección satelital como la teledetección aérea tripulada ya que ambas permiten la medida de numerosos parámetros biofísicos a gran escala. Sin embargo las técnicas clásicas presentan importantes limitaciones: en el caso de la detección satelital, nos encontramos con limitaciones en la resolución espacial y con resolución temporal irregular a causa de la presencia aleatoria de nubosidad; en el caso de la teledetección aérea tripulada, la principal limitación es el coste.
18 Actualmente el Centro Oceanográfico Nacional de Inglaterra (NOC) ha recomendado el uso de aeronaves no tripuladas, denominados como UAVs (Unmanned Aerial Vehicle) . Las ventajas de utilizar UAVs derivan de que cubren el hueco entre teledetección satelital y aerotransportada. Los UAVs pueden revisitar áreas de interés con mayor frecuencia, resolución y economía, no precisan de complicadas correcciones atmosféricas o geométricas, no les afecta la presencia de nubosidad, y además las operaciones no tripuladas son más económicas, llegando
24 a realizar las misiones incluso con más flexibilidad que los vuelos tripulados.
Los principales sistemas marinos UAV de los que se dispone en la actualidad pueden ser lanzados desde una embarcación, generalmente mediante catapulta. Posteriormente, el retorno del UAV se realiza mediante amerizaje y recogida manual o bien mediante redes elevadas. Se conocen también plataformas diseñadas, como hidroaviones tipo catalina, que son capaces de despegar y amerizar de forma automática.
Las líneas prioritarias de actuación de la oceanografía costera comprenden: i) el estudio de la variabilidad temporal, de las tendencias en las condiciones oceanográficas y comunidades biológicas y su relación con el clima ii) el estudio de las relaciones entre los procesos oceanográficos y los recursos vivos marinos iii) el estudio de los organismos marinos nocivos y de las causas de su proliferación
36 iv) el estudio y caracterización del suelo y subsuelo marinos v) el estudio del efecto de las actividades humanas en el ecosistema marino.
Actualmente se emplean barcos y satélites para medir parámetros biofísicos en grandes superficies y para las medidas que no se pueden tomar con ellos se emplea la teledetección aérea. Este tipo de detección facilita la obtención de información con resolución suficientemente alta para observación costera, superando a los satélites
42 y operando a mayor velocidad y altitud que barcos y boyas. Sin embargo, la teledetección aérea basada en aeronaves tripuladas resulta prohibitiva para la mayor parte de las instituciones y empresas interesadas en la observación costera.
EXPLICACIÓN DE LA INVENCIÓN
48 Actualmente se conocen UAVs y embarcaciones de superficie no tripuladas, más conocidas como USVs (Unmanned Surface Vessel) , con motorización única de combustión interna, eléctrica e incluso se conocen USVs con motorización Stirling. Sin embargo, no se conoce ninguno que contemple la integración de un motor eléctrico
o de combustión interna con un motor térmico / solar Stirling. Esto se debe primordialmente en primer lugar a la escasa difusión del motor Stirling, y a problemas de volumen y peso (no deja de tratarse de un sistema con dos motores) . No obstante, estos inconvenientes se pueden superar debido al menor tamaño de los Stirling
54 modernos, al hecho de que al introducir un sistema de recarga continua se pueden montar baterías de menor tamaño y peso. Los motores Stirling se caracterizan por aprovechar, con eficacia de Carnot máxima, diferenciales térmicos como pueden ser los derivados del calor generado por un motor de combustión interna, una llama (por ejemplo, la llama del quemador de un globo) o de un concentrador de energía solar. La introducción de un motor Stirling en las plataformas robóticas obedece a:
• En el caso de motorizaciones eléctricas, el motor Stirling se basará en un concentrador solar de
60 pequeño tamaño; la potencia generada se dedica a recarga continua de las baterías que alimentan al motor eléctrico, aumentando notablemente la autonomía de la plataforma.
• En el caso de motorizaciones a combustión interna, el motor Stirling aprovecha el calor residual del motor, dedicándose la potencia generada a alimentar los circuitos eléctricos y, opcionalmente, a sumarse a la potencia generada por el motor principal. En ambos casos se consigue disminuir el tamaño y peso del motor principal y dispositivos auxiliares.
El sistema integrado de teledetección medioambiental marina basado en plataformas autónomas de la invención comprende como elementos más importantes una unidad aérea no tripulada o UAV (Unmanned Aerial Vehicle) , una embarcación de superficie no tripulada o USV (Unmanned Surface Vessel) y una estación de control.
6 La clave del sistema de la invención se encuentra en la conjunción e interacción entre sí de las plataformas no tripuladas, la dotación de éstas con motorizaciones híbridas de alta autonomía, utilización de sistemas de navegación autónoma, utilización de sistemas de telemetría y transmisión de datos y empleo de baterías sensóricas a bordo de las naves. Con este sistema se pueden monitorizar a muy alta resolución (espacial, temporal, radiométrica, etc.) cualesquiera parámetros biofísicos relevantes para el entorno marino, de forma semi-automática o completamente autónoma. El sistema utiliza sensores de teledetección, sensores de
12 detección próxima y sondas sumergibles.
La sinergia de actuación entre la UAV (unidad aérea no tripulada) y la USV (embarcación de superficie no tripulada) es robótica, con lo que se reducen notablemente los costes operativos.
La embarcación de superficie no tripulada es auxiliar en este sistema y depende de los vuelos de la unidad aérea
18 no tripulada. La embarcación de superficie no tripulada actúa como base repetidora de comunicaciones para la unidad aérea no tripulada de forma que se ahorra peso en la aeronave. Además la embarcación de superficie permite la toma de muestras y medidas en la superficie que se utilizan para calibrar y validar las medidas aéreas. Al ser dependiente de los vuelos de la unidad aérea, la embarcación de superficie se desplaza de forma automática hacia las zonas especiales identificadas por la unidad aérea. La embarcación de superficie se puede utilizar también como punto de amarre de la aeronave en caso de necesidad. Para ello, y para facilitar la toma de
24 muestras en puntos concretos, la embarcación puede disponer de un sistema de posicionamiento dinámico mediante propulsión acimutal.
La unidad aérea no tripulada comprende una aeronave adaptada al entorno marino elegida en función del entorno preciso que se va a analizar. Las distintas aeronaves que se pueden emplear en el sistema de la invención deben tener una alta autonomía, alta resistencia, estabilidad en el aire y flotabilidad. Además la
plataforma aérea debe ser económica y de fácil reparación. Otras características básicas de estas aeronaves son que puedan soportar malas condiciones atmosféricas y que tengan suficiente carga como para embarcar los sensores necesarios.
La unidad aérea no tripulada comprende también un autopiloto que permite la programación de los vuelos antes y durante dichos vuelos. Además está dotado de un sistema de almacenaje y una comunicación inalámbrica con
36 la embarcación de superficie y con la estación de control mediante sistemas OSD (On Screen Display) y vídeo FPV (First Person Video) de los datos de teledetección obtenidos.
Se utiliza un sistema de seguridad del tipo fail safe. Este sistema permite, entre otras opciones, que...
Reivindicaciones:
1. Sistema integrado de teledetección medioambiental marina basado en plataformas autónomas que comprende al menos tres unidades, que son una unidad aérea no tripulada, una embarcación de superficie no tripulada y una estación de control, que interaccionan entre sí, contando la unidad aérea no tripulada con sensores para 6 teledetección y la embarcación de superficie no tripulada con sensores para detección en superficie caracterizado por que la unidad aérea y la embarcación de superficie comprenden sistemas de transmisión de datos inalámbricos configurados para permitir el envío de los datos captados con los sensores a la estación de control y la estación de control comprende un sistema SCADA (Supervisor y Control and Data Acquisition) autoconfigurado en función de la unidad aérea y la embarcación de superficie, el cual permite la comunicación entre las tres unidades del sistema y el análisis y procesado de los datos que se reciben en la estación de
12 control; la unidad aérea y la embarcación de superficie tienen medios de posicionamiento GPS que envían las señales de posición a la estación de control, .
2. Sistema según la reivindicación 1en el que la unidad aérea y la embarcación de superficie tienen una motorización híbrida integrando un motor seleccionado entre un motor eléctrico y un motor de combustión eléctrica, y un motor seleccionado entre un motor Stirling de alimentación térmica y un motor de alimentación
18 solar
3. Sistema según cualquiera de las reivindicaciones anteriores en el que la embarcación de superficie no tripulada comprende repetidores de señal configurados para recibir las señales enviadas por la unidad aérea y enviarlas a la estación de control.
24 4- Sistema según cualquiera de las reivindicaciones anteriores en el que la embarcación de superficie comprende receptores que captan la señal de la posición GPS de la unidad aérea y permiten el desplazamiento de la embarcación de superficie siguiendo la posición de la unidad aérea.
5. Sistema según cualquiera de las reivindicaciones anteriores en la estación de control está configurada para programar los vuelos de la unidad aérea no tripulada mediante puntos de paso, antes del vuelo y durante éste
permitiendo un cambio de instrucciones de vuelo.
6. Sistema según cualquiera de las reivindicaciones anteriores en el que la unidad aérea no tripulada comprende un sistema de seguridad del tipo fail safe de forma que, ante un fallo de transmisiones o de electrónica a bordo, fija a la aeronave en un vuelo circular estable o da una orden de retorno a las coordenadas del punto de lanzamiento y controla el despliegue de un paracaídas automático.
36 7- Método de teledetección medioambiental marina, implementado en el sistema de las reivindicaciones 1 a 5 que se caracteriza por que comprende:
- una etapa de identificación de la zona a estudiar,
- una etapa de identificación de las variables biofísicas a medir,
- una etapa de selección y configuración de la unidad aérea y de la embarcación de superficie,
42. una etapa de lanzamiento de la embarcación de superficie a un punto predefinido de la zona a estudiar,
- una etapa de lanzamiento de la unidad aérea que se produce al confirmar que la embarcación de superficie está en el punto predefinido y se confirma la posibilidad de operar,
- una etapa de captación de datos desde la unidad aérea y desde la embarcación de superficie y envío
de los datos a la estación de control.
48. una etapa de validación de los datos recibidos en la estación de control,
- una etapa de retorno de la unidad aérea y de la embarcación de superficie al lugar de lanzamiento inicial,
- una etapa de procesado de los datos obtenidos en la estación de control.
8. Método según la reivindicación 7 en el que la unidad aérea realiza la captación de datos siguiendo una ruta
54 fotogramétrica y dicha captación de datos se realiza de forma continua por medio de los sensores de la unidad aérea.
9. Método según cualquiera de las reivindicaciones 7 a 8 en el que la embarcación de superficie comprende repetidores de señal que reciben los datos que envía la unidad aérea y los envían a la estación de control.
60 10- Método según cualquiera de las reivindicaciones 7 a 9 en el que durante la séptima etapa de validación de los resultados recibidos en la estación de control, la unidad aérea se mantiene volando en círculo y la embarcación de superficie se mantiene fondeada.
11. Método según cualquiera de las reivindicaciones 7 a 10 en el que se repite la etapa de captación de datos desde la unidad aérea si en la séptima etapa el resultado de la validación de datos es negativo.
FIG. 1
FIG. 2
Patentes similares o relacionadas:
SENSORES DE GASES EN MEDIOS ACUOSOS, APARATO Y SISTEMA AUTOMATIZADO PARA CONTROLAR SISTEMAS DE PRODUCCIÓN ACUÍCOLA, del 25 de Junio de 2020, de GARCÍA BAEZA, Erik, Francisco: Sensor modificado para monitorear gases en medios acuosos, que comprende: un sensor análogo o digital, de gases ; una carcasa aloja y […]
SENSOR AMPEROMÉTRICO DE 4 ELECTRODOS, del 18 de Junio de 2020, de INNOVACIO TECNOLOGICA CATALANA, S.L.: La presente invención se refiere a un sensor amperométrico configurado para la medición de un analito en un fluido caracterizado porque comprende además un electrodo de derivación […]
BOYA PARA SEGUIMIENTO EN TIEMPO REAL DE CONDICIONES MEDIOAMBIENTALES DE ESTANQUES ACUÍCOLAS, del 4 de Junio de 2020, de PREEMAR SOLUCIONES ACUÍCOLAS, S.A. DE C.V: Una boya para seguimiento en tiempo real de condiciones medioambientales de estanques acuícolas, con un compartimento independiente del cuerpo principal para la […]
DISPOSITIVO PARA DOSIFICACION DE BIOCIDAS PARA CONTROLAR LA CALIDAD DEL AGUA, del 28 de Mayo de 2020, de ALFA & OMEGA 2014 S.L: 1. Dispositivo para dosificación de biocidas para controlar la calidad del agua; caracterizado porque comprende: - una probeta de control, […]
Aparato, sistema y método para mantener la precisión de un sensor, del 4 de Marzo de 2020, de Ecolab USA Inc: Un metodo para mantener la precision en la medicion de un parametro de agua industrial utilizado en un sistema de agua industrial, el metodo que comprende: […]
DISPOSITIVO DE CARACTERIZACIÓN DE PISCINAS DE ACUACULTURA, del 13 de Febrero de 2020, de UNIVERSIDAD TÉCNICA PARTICULAR DE LOJA: Dispositivo para e! monitoreo subacuático inalámbrico de las características del agua de una piscina de acuacultura , con el objeto de garantizar una adecuada calidad […]
Procedimiento e instalación de control en tiempo real de la calidad del agua de una red de distribución, del 12 de Febrero de 2020, de SUEZ Groupe: Procedimiento de control de la calidad del agua de una red de distribución de agua potable que comprende, por un lado, contadores de consumo y, por otro lado, […]
Método para el control en línea de la calidad del agua, del 18 de Diciembre de 2019, de Aqua-Q AB: Un método para controlar la calidad del agua que fluye en una tubería, mediante el desvío de un flujo de agua desde la tubería hacia un contador […]