Sistema de calibración de sensor de movimiento dinámico y procedimiento para calibrar un sensor de movimiento dinámico.
Un sistema (30) de calibración de sensor de movimiento dinámico,
que comprende:
un excitador (12) eléctrico o electromecánico;
un sensor (60) de desplazamiento óptico, en el que dicho sensor de desplazamiento óptico es un sensor de referencia;
una unidad de microprocesador (50);
en el que dicha unidad de microprocesador genera una señal sinusoidal para que dicho excitador eléctrico o electromecánico genere el movimiento armónico de dicho excitador, en el que, el sensor de desplazamiento óptico comprende una escala (62), una rejilla graduada (64) y un foto-detector (65), el sistema de calibración de sensor de movimiento dinámico comprende además al menos un convertidor analógico-digital (ADC) (54, 56) incluido en dicha unidad de microprocesador, en el que dicho sensor de desplazamiento óptico presenta a su salida una primera señal de desplazamiento analógica para dicho ADC, para su conversión en una primera señal digital.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08020211.
Solicitante: THE MODAL SHOP, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3149 E KEMPER ROAD CINCINNATI OH 45241 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Sill,Robert D, Schiefer,Mark I, Moses,Joshua B.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D18/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › Aparatos para ensayos o calibraciones o las disposiciones previstas en los grupos G01D 1/00 - G01D 15/00.
- G01P21/00 G01 […] › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase.
- G01P21/02 G01P […] › G01P 21/00 Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase. › de tacómetros.
PDF original: ES-2377748_T3.pdf
Fragmento de la descripción:
Sistema de calibración de sensor de movimiento dinámico y procedimiento para calibrar un sensor de movimiento dinámico
Referencia cruzada con solicitudes relacionadas
La solicitud reivindica el beneficio a tenor de 35 U.S.C. §119 (e) de la Solicitud Provisional U.S. núm. 61/1008.839 depositada el 20 de noviembre de 2007 y que se incorpora en la presente memoria por referencia.
Campo de la invención La invención se refiere en general a procedimientos y sistemas para una calibración precisa de sensores de movimiento dinámicos. Específicamente, se refiere a la provisión de un sensor de posición de alta precisión, proporcionando con ello una referencia superior en cuanto a calibración de precisión de sensores de movimiento dinámicos a baja frecuencia. El Sensor de Movimiento Dinámico se define como un transductor que mide desplazamiento y/o aceleración variables en el tiempo, incluyendo aunque sin limitación los acelerómetros, velocímetros y sondas de desplazamiento.
Antecedentes de la invención
Los sensores de movimiento dinámicos (“sensores de movimiento” o “sensores”) son transductores utilizados para medir aceleración. Los sensores de movimiento dinámicos son normalmente sensibles a lo largo de un único eje. Esto es lo que se conoce como sensor de movimiento dinámico uni-axial o de eje único. Por ejemplo, la magnitud de aceleración se mide por medio de un instrumento o sistema de medición externo que detecta la salida eléctrica de un acelerómetro. La salida del acelerómetro es normalmente una forma de onda de tensión proporcional a la magnitud de la aceleración aplicada. De manera similar, los dispositivos dinámicos de detección de movimiento, tales como los velocímetros y los transductores de desplazamiento que responden dinámicamente, presentan en su salida una forma de onda de tensión o generan corriente proporcional a la velocidad. Un instrumento de medición de sensibilidad de matriz dinámica para sensores de inercia y un procedimiento de medición para el mismo, son conocidos a partir del documento EP 1 630 562 A1.
El proceso de calibración de un acelerómetro o de otro sensor de movimiento comprende aplicar un movimiento medido o calculado conocido al sensor de movimiento dinámico que va a ser comprobado (el Sensor Bajo Prueba o el SUT) , según se determina mediante un sensor de referencia de alta precisión (REF) . Esto es lo que se conoce como procedimiento recíproco. El procedimiento de calibración recíproca de acelerómetro está cubierto por un estándar ISO (ISO16063-21: Calibración de Vibración por Comparación con un Transductor de Referencia) y solamente va a ser resumido en la presente memoria.
Los dispositivos SUT y REF están ambos fijados a un dispositivo capacitado para impartir movimiento armónico en desplazamiento significativo. Un dispositivo de ese tipo ha sido representado en la Figura 1 y se menciona como agitador de carrera larga o vibrador de carrera larga. Durante la calibración, el transductor de referencia, que ha sido previamente calibrado por otros medios tales como un interferómetro láser (según se describe en ISO16063-11) , se utiliza para medir la aceleración aplicada. Ambos acelerómetros presentan a la salida una señal eléctrica variable en el tiempo, proporcional a la magnitud de la aceleración a la que se somete el dispositivo. Esta señal eléctrica variable en el tiempo puede adoptar forma de tensión proporcional a la magnitud, pero también puede tener forma de corriente, o de carga proporcional a la magnitud de la aceleración. En el caso de un sensor con salida de corriente o de carga, se utiliza una unidad de acondicionamiento de señal con el fin de convertir la corriente o carga en la señal de tensión apropiada para el convertidor analógico-digital utilizado para digitalizar y registrar la señal de magnitud de aceleración. El software de calibración que se ejecuta en el microprocesador o en el ordenador conectado al REF o al SUT, es entonces el responsable de calcular la sensibilidad del acelerómetro que va a ser calibrado multiplicando la sensibilidad del sensor de referencia por la relación de las magnitudes de las señales eléctricas de los dos dispositivos. Se calcula la relación de aceleración SUT respecto a aceleración REF y esta relación se utiliza para calcular la sensibilidad de tensión del acelerómetro SUT.
La precisión y resolución de REF es el factor limitativo de la precisión de la operación de calibración. A frecuencias más bajas, típicamente de 10 Hz o inferiores, la utilización de un acelerómetro u otro tipo de sensor de movimiento como sensor de referencia limita la precisión de calibración del sistema debido al hecho de que la aceleración disminuye como el cuadrado de la frecuencia para un desplazamiento dado. Esto es lo que se conoce normalmente como limitación de carrera, y por esa razón la industria utiliza típicamente agitadores capaces de generar desplazamientos de al menos 0, 15 m (= 6 pulgadas) de pico a pico (pk-pk) para su uso en calibraciones a baja frecuencia.
Se debe apreciar que el estándar ISO16063 sugiere la utilización ya sea de un procedimiento de cálculo de valor cuadrático medio (“RMS”) o ya sea un procedimiento espectral de cálculo de la magnitud de aceleración a la frecuencia de interés. El procedimiento típico utilizado en la técnica anterior ha sido el de utilizar un procedimiento RMS, pero esto se está cambiando rápidamente al procedimiento espectral dado que éste está capacitado para proporcionar un resultado superior en términos de rechazo de ruido, mejorando de ese modo la precisión global de la calibración.
Así, existe en este campo un problema asociado al procedimiento conocido de calibración de sensores de movimiento dinámicos a bajas frecuencias utilizando un sensor de movimiento como referencia o estándar básico.
Breve sumario de la invención
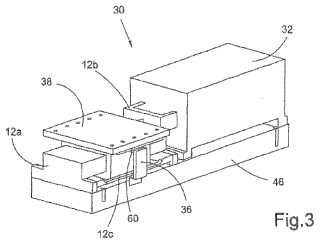
La presente invención comprende un sistema de calibración de sensor de movimiento dinámico que incluye una mesa agitadora de carrera larga u otro excitador (“excitador”) mecánico o electromecánico de baja frecuencia, un sensor de desplazamiento óptico o codificador, en el que el sensor de desplazamiento óptico es un sensor de referencia, una unidad de microprocesador, y al menos un convertidor analógico-digital (ADC) incluido en el microprocesador, y en el que la unidad de microprocesador genera una señal sinusoidal para el excitador, para generar el movimiento armónico del excitador y en el que adicionalmente el sensor de desplazamiento óptico presenta a su salida una primera señal de desplazamiento analógica para el al menos un ADC para su conversión en una primera señal digital. En realizaciones alternativas, el sistema de calibración puede disponer de dos, tres o más ADCs.
La presente invención comprende también un procedimiento para calibrar un sensor de movimiento dinámico que comprende:
a – enviar una onda sinusoidal continua que tiene una frecuencia de bajo nivel predeterminado desde un microprocesador hasta una mesa agitadora de carrera larga u otro excitador mecánico o electromecánico de baja frecuencia, para generar un movimiento armónico en la mesa;
b – transmitir las señales de salida de corriente fotoeléctrica sinusoidal desde un codificador de desplazamiento óptico posicionado en la mesa agitadora hasta una primera placa de convertidor analógico-digital (ADC) del microprocesador;
c – dirigir una señal de salida desde un sensor de movimiento dinámico de prueba hasta una segunda placa de ADC, en la que el segundo ADC esta vinculado funcionalmente al primer ADC;
d – convertir las señales de salida de corriente fotoeléctrica en una señal de desplazamiento;
e – transformar la señal de desplazamiento en una medición de magnitud y de fase a la frecuencia predeterminada utilizando métodos de transformada de Fourier;
f – medir la magnitud y la fase de la señal de salida del sensor de prueba a la frecuencia predeterminada utilizando métodos de transformada de Fourier;
g – almacenar las mediciones de magnitud y de fase del codificador y del sensor de desplazamiento óptico;
h – calcular la sensibilidad del sensor de movimiento dinámico de prueba;
i – repetir las etapas a-a h-a una frecuencia de bajo nivel determinada diferente.
El SUT puede ser un acelerómetro, un velocímetro o un transductor de desplazamiento... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (30) de calibración de sensor de movimiento dinámico, que comprende:
un excitador (12) eléctrico o electromecánico;
un sensor (60) de desplazamiento óptico, en el que dicho sensor de desplazamiento óptico es un sensor de referencia;
una unidad de microprocesador (50) ;
en el que dicha unidad de microprocesador genera una señal sinusoidal para que dicho excitador eléctrico o electromecánico genere el movimiento armónico de dicho excitador, en el que, el sensor de desplazamiento óptico comprende una escala (62) , una rejilla graduada (64) y un foto-detector (65) , el sistema de calibración de sensor de movimiento dinámico comprende además al menos un convertidor analógico-digital (ADC) (54, 56) incluido en dicha unidad de microprocesador, en el que dicho sensor de desplazamiento óptico presenta a su salida una primera señal de desplazamiento analógica para dicho ADC, para su conversión en una primera señal digital.
2. El sistema de calibración de sensor de movimiento dinámico según se expone en la reivindicación 1, que comprende además un sensor de movimiento dinámico de prueba (SUT) (18) , en el que dicho SUT presenta a su salida una segunda señal de desplazamiento analógica para dicho al menos un ADC, para su conversión en una segunda señal digital.
3. El sistema de calibración de sensor de movimiento dinámico según se expone en la reivindicación 1 ó 2, en el que dicho al menos un ADC consiste en dos ADCs funcionalmente unidos entre sí, y dicho sistema comprende un sensor de movimiento dinámico de prueba (SUT) en el que dicho SUT presenta a su salida una segunda señal de desplazamiento analógica para el segundo de dichos dos ADCs, para su conversión en una segunda señal digital.
4. El sistema de calibración de sensor de movimiento dinámico según se expone en la reivindicación 2 ó 3, en el que dicha primera señal analógica y dicha segunda señal analógica son convertidas en señales digitales simultáneamente o casi simultáneamente.
5. El sistema de calibración de sensor de movimiento dinámico según se expone en la reivindicación 3 ó 4, en el que dicho primer ADC es una placa de resolución media y dicho segundo ADC es un ADC de alta resolución.
6. El sistema de calibración de sensor de movimiento dinámico según se expone en las reivindicaciones 3 a 5, en el que dicha unión funcional permite que se transfiera información y datos entre dicho primer ADC y dicho segundo ADC.
7. El sistema de calibración de sensor de movimiento dinámico según se expone en las reivindicaciones 1 a 6, que comprende además un convertidor digital-analógico (DAC) , generando dicho DAC (52) la citada señal sinusoidal para controlar el movimiento de dicho excitador.
8. El sistema de calibración de sensor de movimiento dinámico según se expone en las reivindicaciones 1 a 7, que comprende además un amplificador de potencia (58) , en el que dicha señal sinusoidal es transmitida a dicho excitador a través del citado amplificador de potencia.
9. El sistema de calibración de sensor de movimiento dinámico según se expone en las reivindicaciones 3 a 8, que comprende además un módulo (59) de acondicionamiento de señal que conecta el citado SUT y el citado segundo ADC.
10. Un procedimiento para calibrar un sensor de movimiento dinámico (SUT) que comprende:
a – enviar una onda sinusoidal continua que tiene una frecuencia de bajo nivel predeterminado desde una unidad de microprocesador hasta una mesa agitadora de carrera larga para generar un movimiento armónico en dicha mesa;
b – transmitir las señales de salida en cuadratura de corriente fotoeléctrica sinusoidal desde un codificador de desplazamiento óptico posicionado en la citada mesa agitadora hasta una primera placa de convertidor analógico-digital (ADC) (54) de dicha unidad de microprocesador;
c – dirigir una señal de salida desde un SUT hasta una segunda placa de ADC (56) , en la que dicha segunda placa de ADC (56) esta vinculada funcionalmente a dicha primera placa de ADC;
d – convertir dichas señales de salida de corriente fotoeléctrica en una señal de desplazamiento;
e – transformar la citada señal de desplazamiento en una medición de magnitud y fase a dicha frecuencia predeterminada utilizando métodos de transformada de Fourier;
f – medir la magnitud y la fase de dicha señal de salida de SUT a la citada frecuencia predeterminada utilizando métodos de transformada de Fourier;
g – almacenar dichas mediciones de magnitud y de fase de dicho codificador de desplazamiento óptico y del citado SUT;
h – calcular la sensibilidad de dicho SUT; y i – repetir las etapas a-a h-a una frecuencia predeterminada diferente de bajo nivel.
11. El procedimiento para calibrar un sensor de movimiento dinámico según se expone en la reivindicación 10, en el que dicha onda sinusoidal es enviada desde un convertidor digital-analógico (DAC) (52) .
12. El procedimiento para calibrar un sensor de movimiento dinámico según se expone en la reivindicación 10 u 11, en el que dicha señal de salida del citado sensor de movimiento dinámico de prueba es una señal de magnitud y fase de tensión.
13. El procedimiento para calibrar un sensor de movimiento dinámico según se expone en la reivindicación 10 u 11, en el que dicha señal de salida procedente de dicho sensor de movimiento dinámico de prueba es una señal de magnitud y fase de corriente, en el que dicha señal de salida de corriente es dirigida a dicha segunda placa de ADC a través de un módulo (59) de acondicionamiento de señal.
14. El procedimiento para calibrar un sensor de movimiento dinámico según se expone en las reivindicaciones 10 a 13, en el que dicho primer ADC consiste en una pluralidad de primeros ADCs, estando cada uno de dicha pluralidad de primeros ADCs unido funcionalmente con cada uno de los otros para obtener las citadas mediciones de magnitud y fase a partir de las citadas salidas de corriente fotoeléctrica.
15. El procedimiento de calibración de un sensor de movimiento dinámico según se expone en las reivindicaciones 10 a 14, en el que un ADC obtiene las mediciones de magnitud y fase de ambas salidas de corriente fotoeléctrica citadas y de dicha señal de salida de sensor de movimiento dinámico.
Patentes similares o relacionadas:
Dispositivo para determinar y/o ajustar la precisión de un tacógrafo, del 23 de Octubre de 2019, de Semmler GmbH Tacho Control: Un sistema de monitorización para la monitorización del desplazamiento de una torre de aerogenerador , dicho sistema de monitorización comprende: - una o […]
Dispositivo para la determinación del error de orientación de un sensor eólico, del 23 de Octubre de 2019, de Kintech Ingenieria, S.L: Dispositivo para la determinación del error de orientación de un sensor eólico respecto del Norte geográfico, que comprende: - una primera […]
Procedimiento de desmontaje para turbinas de gas y dispositivo de calibración, del 28 de Agosto de 2019, de LUFTHANSA TECHNIK AG: Método de desmontaje para turbinas de gas para reemplazar y/o inspeccionar y/o reparar componentes dispuestoS en una región de apoyo delantero de la turbina […]
Procedimiento para calibrar un codificador rotatorio, del 20 de Febrero de 2019, de BAUMULLER NURNBERG GMBH: Procedimiento para calibrar un codificador rotatorio de una máquina eléctrica diseñado como un transmisor incremental que emite una […]
Método para estimar la velocidad rotacional de una herramienta montada sobre un husillo rotativo de una máquina herramienta y tal máquina herramienta, del 25 de Mayo de 2016, de MARPOSS SOCIETA PER AZIONI: Método para estimar la velocidad rotacional de una herramienta montada en un husillo rotativo de una máquina herramienta usando un sistema […]
 Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles, del 10 de Febrero de 2016, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles , el cual está equipado con al menos una primera unidad de mecanismo de traslación […]
Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles, del 10 de Febrero de 2016, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles , el cual está equipado con al menos una primera unidad de mecanismo de traslación […]
 Anemómetro, del 12 de Marzo de 2014, de FERNSTEUERGERATE KURT OELSCH GMBH: Anemómetro para medir velocidades del viento, estando configurado el anemómetro como anemómetro de cazoletas o como anemómetro de molinete, que contiene:
a) […]
Anemómetro, del 12 de Marzo de 2014, de FERNSTEUERGERATE KURT OELSCH GMBH: Anemómetro para medir velocidades del viento, estando configurado el anemómetro como anemómetro de cazoletas o como anemómetro de molinete, que contiene:
a) […]
Sistema de calibrado de un sensor de movimiento dinámico y procedimiento para calibrar un sensor de movimiento dinámico, del 14 de Agosto de 2013, de THE MODAL SHOP, INC: Un sistema de calibrado del sensor de movimiento dinámico que comprende: una mesa ; un sensor de movimiento dinámico en ensayo (SUT), […]