SISTEMA DE ACIONAMIENTO DE PASILLOS MOVILES.
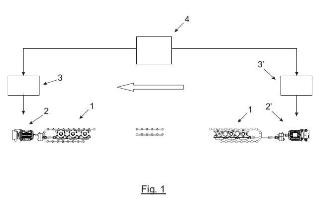
Sistema de accionamiento de pasillos móviles, que comprende una unidad motriz (2-2') dispuesta en cada extremo del pasillo (1),
medios de control (3-3') para cada unidad motriz y medios de control general (4) del conjunto de unidades motrices (3-3').
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131327.
Solicitante: THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ ALEMANY,MIGUEL ANGEL, OJEDA ARENAS,JOSE, FLOREZ CASTRO,ALBERTO, CANCIO FERVIENZA,ALBERTO, PELLO GARCIA,ALBERTO, CANTELI ALVAREZ,Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B23/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 23/00 Partes constitutivas de escaleras o de pasillos mecánicos. › Mecanismos de accionamiento.
- B66B25/00 B66B […] › Control de las escaleras o pasillos mecánicos (pasillos mecánicos del tipo con velocidad variable B66B 21/12; pasamanos del tipo con velocidad variable B66B 23/26).
Fragmento de la descripción:
DESCRIPCION SISTEMA DE ACCIONAMIENTO DE PASILLOS MÓVILES de la invención La presente invención se refiere a un sistema de accionamiento para pasillos móviles, y más concretamente de pasillos móviles utilizados para el transporte de personas y mercancías y que están constituidos por una banda sinfín de paletas, que se desplazan sobre guías laterales. Los pasillos móviles tradicionales para el fin indicado están compuestos por un conjunto de paletas que se desplazan sobre unas guías, las cuales están sujetas y ajustadas sobre una estructura que soporta el peso de los componentes y usuarios. Además, los pasillos están dotados de una balaustrada, de cristal u opaca, sujeta también a la misma estructura portante, y sobre la que se mueve un pasamanos a la misma velocidad que las paletas. Antecedentes de la invención Los sistemas de transporte de pasajeros/mercancías convencionales, tales como pasillos móviles, incluyen una cadena de paletas transportadoras que se desplazan en un circui to con el lo largo de fin de proporcionar un movimiento continuo a un trayecto específico. Las paletas transportadoras están conectadas a dicho circuito de cadena, la cual se mueve gracias a un sistema de accionamiento. El sistema de accionamiento consiste normalmente en una cadena de placas transportadoras, motorreductor eléctrico. El ruedas dentadas, un ej e motor eléctrico acciona al y un ej e, al cual están unidas solidariamente las ruedas dentadas, las cuales transmiten el movimiento a los eslabones de la cadena de paletas mueven de transportadoras. Las paletas transportadoras la misma forma que dicha cadena. El sistema se de accionamiento se sitúa únicamente en uno de los extremos del pasillo rodante mientras que en el extremo contrario se sitúan normalmente los elementos encargados de proporcionar el tensado del sistema. En estas zonas extremas del pasillo rodante tiene lugar el volteo de las paletas transportadoras, que recorren en su totalidad la parte inferior del pasillo rodante realizando el camino de vuelta.
En los últimos años han surgido una serie de nuevos diseños que pretenden disminuir la altura máxima de la máquina, por lo que el sistema convencional de accionamiento debe ser modificado.
Existen varías soluciones que se han escogido en función del concepto de pasillo que se haya utilizado. Una de estas soluciones se detalla en la patente internacional WO 05042392 de Kone Corporation, de acuerdo con la cual el sistema de accionamiento se sitúa, al menos parcialmente, en el interior de la balaustrada, lo cual es posible mediante la utilización de un motor plano. A partir de aquí el accionamiento se produce mediante una serie de correas o cadenas que finalmente accionan la cadena de paletas, la cual tiene un paso corto para poder voltear en el pequeño espacio disponible, pero por lo demás trabaj a como una cadena de pasillo convencional.
En la US 7341139, también de Kone Corporation, se describe el accionamiento de pasamanos y su unión al sistema motriz y al accionamiento de paletas. En la US 7353932, de Kone Corporatión, se describe la disposición de banda de paletas y la posible utilización de dos motores de accionamiento simultáneo.
En la patente española 200601651, de ThyssenKrupp, se describe un pasillo compacto basado en un concepto de banda formado por paletas de paso mas corto que el convencional. Este pasillo comprende un sistema de accionamiento que mueve las paletas de un pasillo móvil a través de cadenas de arrastre que se engranan directamente a la parte inferior de las cadenas de eslabones de tracción. La cadena de arrastre tiene rodillos de arrastre separados que están hechos de materiales deformables y elásticos. Los eslabones de las cadenas de tracción están conectados entre sí por ej es de unión y poseen dientes y garras en la parte inferior para engranar con la cadena de arrastre y los rodillos.
La patente española de solicitud 200931290 busca accionamiento para escaleras y ThyssenKrupp con número proponer pasillos un sistema móviles carente de de de cadenas mediante el uso de un conjunto de ruedas de rodillos 5 solidarias a árboles montados entre los tramos de ida y retorno de la banda de peldaños o paletas y que engranan bien directamente en los peldaños o paletas a través de conformaciones de engrane que presenten dichos peldaños o paletas por su superficie interna o bien en conformaciones 10 similares presentes en una cadena solidaria a la banda de paletas o peldaños. de En la cualquiera de estas aplicaciones existe el limitación de potencia transmisible problema por los accionamientos a la banda de peldaños o paletas, dado que el 15 poco espacio disponible en comparación con los accionamientos tradicionales dificulta el uso de múltiples elementos de transmisión y el adecuado refuerzo de los mismos. Estas limitaciones en cuanto a potencia transmitida redundan en una restricción de la distancia máxima que puede 2 O "servirse" con estos sistemas en ambos sentidos de marcha. Otro inconveniente de tener la unidad motriz en un extremo solo, es que para pasillos horizontales de gran longitud es necesario aplicar en el caso de sentido "descendente" (unidad motriz en cabeza superior) una gran 25 fuerza desde la estación tensora localizada en la cabeza opuesta a la unidad motriz con de zonas con grandes tensiones de paletas. Esto es así ya accionamiento empuj a la banda el fin de evitar la aparición negativas en la cadena/banda que en esa dirección el de paletas y toda la carga 30 sobre ella y no tira de ella como sucede en el sentido "ascendente". 35 de la invención La presente invención se refiere a un accionamiento descrito, que para pasillos móviles del tipo supone una modificación en el accionamiento tradicional de pasillos móviles. sistema de inicialmente concepto de El obj eto de la invención es proporcionar un esquema tractor basado en el uso de varias unidades motrices con objeto de superar los problemas anteriormente reseñados. Particularmente se utilizará una unidad motriz en cada extremo del pasillo controladas de manera que ambas trabajen cooperativamente.
El sistema de accionamiento de la invención comprende una unidad motriz dispuesta en cada extremo del pasillo, medios de control para cada unidad motriz y medios de control general del conjunto de unidades motrices del sistema de accionamiento.
Las unidades motrices pueden incluir cada una uno o mas motores y con el fin de garantizar un correcto funcionamiento del sistema de accionamiento es necesario controlar los motores de las unidades motrices para que trabajen de un modo cooperativo, es decir compartiendo entre ellos la carga/potencia total del sistema. De este modo los motores de las unidades motrices dispuestas en ambos extremos del pasillo proporcionarán en conjunto la potencia necesaria para el accionamiento de dicho pasillo.
Los medios de control de cada unidad motri z gobernarán directamente el motor o motores de dicha unidad motriz, para proporcionar en cada momento el par y velocidad requeridos.
Por su parte, los medios de control general incluirán un algoritmo de control y/o supervisión, encargado de ejecutar la estrategia de coordinación entre los motores de las unidades motrices y dar las órdenes necesarias a los medios de control de cada unidad motriz.
Los medios de control del motor o motores de cada unidad motriz pueden comprender un variador de frecuencia para motores de corriente alterna, con un algoritmo de control vectorial en lazo cerrado. El variador de frecuencia puede incluir un rectificador de entrada, encargado de generar la tensión continúa para un bus, desde donde se alimenta un inversor DC-AC que alimenta al motor o motores de la unidad motriz correspondiente. Las unidades motrices dispuestas a uno y otro lado del pasillo trabajarán entre sí de modo cooperativo, con un algori tmo de repartición de carga maestro-esclavo, proporcionando a la unidad motriz que actúa como maestro una cantidad fija de par, superior al 50%, y la unidad que actúa como esclavo, el resto. El algoritmo de repartición de carga maestro-esclavo puede ser dependiente o independiente del sentido de giro.
La unidad motriz maestra puede estar controlada en velocidad y la unidad motri z esclava en modo seguimiento de par, para seguir la consigna de par correspondiente al par ejercido en cada instante por la unidad motriz maestra, ajustada para respetar los porcentajes de reparto carga/par establecidos entre ambas unidades. También las unidades motrices maestra y esclava pueden estar controladas en velocidad, siendo ambas consignas de velocidad iguales y teniendo la unidad motriz esclava un límite de par que corresponderá al par ejercido...
Reivindicaciones:
1. Sistema de accionamiento de pasillos móviles, cuyos pasillos están constituidos por una banda de paletas que se desplaza sobre unas guías laterales que comprende una unidad 5 motriz (2-2') dispuesta en cada extremo del pasillo, que trabaj an entre sí de modo cooperativo, para proporcionar en conjunto la potencia necesaria para el accionamiento del pasillo, e incluyen al menos un motor cada una, caracterizado porque comprende además, en combinación, medios de control (3-10 3') para cada unidad motriz y medios de control general (4) del conjunto de unidades motrices; cuyos medios de control (3-3') de cada unidad motriz gobiernan directamente el motor o motores de dichas unidades motrices, para proporcionar en cada momento el par y velocidad requeridos; y cuyos medios de 15 control general (4) incluyen un algoritmo de control y/o supervisión encargado de ejecutar la estrategia de combinación entre los motores de las unidades motrices y dar las órdenes necesarias a los medios de control de cada unidad motriz.
2. Sistema según la reivindicación 1, caracterizado 20 porque los medios de control (3-3') del motor o motores de cada unidad motriz comprenden un variador de frecuencia para motores de corriente alterna, con un algoritmo de control vectorial en lazo cerrado.
3. Sistema según la reivindicación 2, caracterizado 25 porque el variador de frecuencia incluye un rectificador de entrada (8) encargado de generar la tensión continúa para un BUS-OC (9) , desde donde se alimenta un inversor DC-AC (10) que alimenta al motor (2-2') .
4. Sistema según la reivindicación 1, caracterizado 3 O porque las unidades motrices (2 -2') dispuestas a uno y otro lado del pasillo (1) trabajan entre sí de modo cooperativo, con un algoritmo de repartición de carga maestro-esclavo, proporcionando la unidad motriz que actúa como maestro una cantidad fija de par, superior al 50%, y la unidad que actúa 35 como esclavo, el resto.
5. Sistema según la reivindicación 4, caracterizado porque la unidad motriz maestra está controlada en velocidad y la unidad motriz esclava está controlada en modo seguimiento de par, para seguir la consigna de par correspondiente al par ejercido en cada instante por la unidad motriz maestra, ajustada para respectar los porcentajes de reparto carga/par establecidos entre ambas unidades.
6. Sistema según la reivindicación 4, caracterizado porque las unidades motriz y esclava están controladas en velocidad, siendo ambas consignas de velocidad iguales, teniendo la unidad motriz esclava un límite de par que corresponderá al par ejercido por la unidad motriz maestra en cada instante, ajustada para respetar los porcentajes de reparto de carga/par establecidos entre ambas unidades.
1.
7. Sistema según la reivindicación 4, caracterizado porque la unidad maestra está constituida por la unidad motriz más alejada de la entrada de pasajeros.
8. Sistema según la reivindicación 4, caracterizado porque el algoritmo de repartición de carga maestro-esclavo es 2 O dependiente del sentido de giro.
9. Sistema según la reivindicación 4, caracterizado porque el algoritmo de repartición de carga maestro-esclavo es independiente del sentido de giro.
10. Sistema según las reivindicaciones anteriores, 25 caracterizado porque los medios de control general están implementados en un dispositivo hardware único.
11. Sistema según las reivindicaciones 1 a 9, caracterizado porque el sistema de control general está implementado en una serie de módulos hardware distribuidos en 3 O las unidades motrices y unidos entre sí por comunicaciones analógicas o digitales, actuando uno de los módulos como maestro y el resto como esclavos y estando el maestro asignado a la unidad motriz maestra.
12. Sistema según las reivindicaciones 1 a 9, 35 caracterizado porque el sistema de control general está implementado en una serie de módulos hardware distribuidos en las unidades motrices e integrados en los medios de control de los motores y unidos entre sí por comunicaciones analógicas o digitales, actuando uno de los módulos como maestro y el resto como esclavo y estando el maestro asignado a la unidad motriz maestra.
Patentes similares o relacionadas:
Sistema de transporte para el transporte de pasajeros / mercancías, del 22 de Abril de 2020, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Un sistema de transporte para el transporte de pasajeros / mercancías formado mediante una correa sin fin móvil, que comprende: una pluralidad de conjuntos de […]
Sistema de giro para sistema de transporte por cinta, del 6 de Marzo de 2019, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Un sistema de giro para un sistema de transporte por cinta, siendo la cinta de la variedad formada por una pluralidad de pallets , comprendiendo el sistema de transporte […]
Sistema de transmisión de potencia para transportador de personas, del 15 de Noviembre de 2017, de KONE CORPORATION: Un sistema de transmisión de potencia para un transportador de personas, que comprende: una alojamiento de transmisión; un primer motor […]
Dispositivo para desplazar personas, cadena de transmisión y método en el uso de un dispositivo para desplazar personas, del 8 de Noviembre de 2017, de KONE CORPORATION: Dispositivo para desplazar personas, más particularmente un pasillo rodante, que comprende una pluralidad de planchas o escalones para transportar y desplazar personas, […]
Rueda de cadenas de transporte y rueda de cadenas de desviación con duración de vida útil mejorada, del 20 de Septiembre de 2017, de INVENTIO AG: Escalera mecánica con una cinta de escalones o un pasillo rodante con una cinta de plataformas (107, en los que la cinta de escalones […]
Sistema de accionamiento para escaleras y pasillos móviles, del 24 de Mayo de 2016, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Sistema de accionamiento para escaleras y pasillos móviles, que comprende uno o más árboles de accionamiento dispuestos entre tramos de […]
 Sistema de accionamiento para un dispositivo de traslación con cadena deslizante, del 9 de Marzo de 2016, de INVENTIO AG: Dispositivo de traslación con un sistema de transporte que comprende una cadena de transporte con cierto número de eslabones […]
Sistema de accionamiento para un dispositivo de traslación con cadena deslizante, del 9 de Marzo de 2016, de INVENTIO AG: Dispositivo de traslación con un sistema de transporte que comprende una cadena de transporte con cierto número de eslabones […]
Apoyo para una sección de bastidor de un dispositivo para el transporte de personas, del 15 de Julio de 2015, de KONE CORPORATION: Apoyo para una sección de armazón de un dispositivo para el transporte de personas guiado de forma similar a un arco de curva espacial, formado por varias consolas […]