SISTEMA ANTICOLISION ENTRE PASARELAS DE ACCESO A AERONAVES.
Sistema anticolisión entre pasarela de acceso a aeronaves, que comprende:
a) definir para cada pasarela un sistema de ejes de coordenadas fijo con origen en el centro (30, 30', 30'') de la rotonda de entrada y un sistema de ejes de coordenadas móvil con origen en el centro (25, 25' y 25'') de la rotonda; b) definir para cada pasarela y en cada momento una serie de referencias, por sus coordenadas respecto del primero o segundo sistema de ejes de coordenadas, en base a los cuales se calculan las distancias entre referencias de cada pasarela y las de las pasarelas adyacentes.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200801597.
B64F1/305TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64AERONAVES; AVIACION; ASTRONAUTICA. › B64FINSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › B64F 1/00 Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00). › Pasarelas que se extienden entre el edificio terminal y la aeronave, p. ej. telescópicas, ajustables verticalmente.
Clasificación PCT:
B64F1/305B64F 1/00 […] › Pasarelas que se extienden entre el edificio terminal y la aeronave, p. ej. telescópicas, ajustables verticalmente.
Fragmento de la descripción:
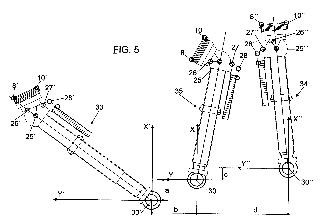
Sistema anticolisión entre pasarelas de acceso a aeronaves. Campo de la invención La presente invención se refiere a un sistema anticolisión entre pasarelas de acceso a aeronaves, utilizadas habitualmente en aeropuertos para el embarque y desembarque de pasajeros del avión. El sistema de la invención está especialmente indicado en casos en los que se requiere que varias pasarelas deban de dar simultáneamente servicio a las diferentes puertas de un avión, en las que existe una gran proximidad entre pasarelas. Antecedentes de la invención La necesidad de realizar la conexión entre la terminal del aeropuerto y las aeronaves sé presentó durante la primera mitad del siglo XX, con la aparición de las primeras aerolíneas comerciales. El diseño de las pasarelas de embarque ha sufrido cambios a lo largo del tiempo y se han efectuado mejoras tecnológicas que responden a las nuevas expectativas de los clientes y que se han arraigado y extendido en nuevos diseños. Las pasarelas actualmente conocidas están formadas por una estructura giratoria, que denominaremos rotonda de entrada conectada a la fachada de la terminal a través de un túnel fijo o cuello por donde se produce el embarque y desembarque de los pasajeros; una estructura de apoyo de la rotonda de entrada denominada columna; un túnel compuesto por una estructura telescópica que permite modificar la longitud de la pasarela según la distancia entre la terminal y la puerta de embarque del avión; un sistema de elevación compuesto también por una estructura telescópica sobre la que se apoya el túnel y que permite modificar su altura y adaptarse al nivel de la puerta del avión; un sistema de rodadura sobre el que se apoya el sistema de elevación y que permite el movimiento de la pasarela sobre la plataforma del aeropuerto; una estructura giratoria denominada cabina que sirve de enlace entre la pasarela y el avión; una estructura circular sobre la que gira la cabina, que denominaremos ronda y una escalera habitualmente situada en el extremo de la pasarela más próximo al avión que permite el acceso a la pasarela desde la plataforma del aeropuerto. Actualmente existe una clara tendencia en el mercado hacia la construcción de aeronaves de gran tamaño, con mayor capacidad de pasajeros, cuyas puertas de acceso están situadas a mayores alturas. Incluso hay aviones que disponen de asientos para pasajeros en varios niveles, con varias puertas de acceso y a diferentes alturas, lo que obliga a las pasarelas de embarque a dar servicio simultáneamente a varias puertas. Adicionalmente, la utilización de pasarelas de embarque para conducir a los pasajeros entre la terminal del aeropuerto y el avión está cada vez más generalizada y las pasarelas son cada vez más abundantes en los aeropuertos, que en ocasiones no disponen de mucho espacio para ubicar las pasarelas con lo que es necesario controlarlas de forma precisa para evitar posibles colisiones entre ellas. Además la visibilidad que tiene el operario de la pasarela es limitada y depende en muchas ocasiones de cámaras que no muestran todos los puntos de la pasarela por lo que es fácil que se produzcan colisiones entre ellas. 2 ES 2 357 223 A1 2 Los sistemas anticolisión utilizados hasta el momento, se basan principalmente en las siguientes tecnologías: 1.- Instalación de diferentes dispositivos de detección por los laterales de las pasarelas, como pueden ser sensores de ultrasonidos, infrarrojos, láser, radares, etc., que envían una señal al sistema de control de la pasarela cuando algún objeto es detectado por los dispositivos indicados. Esta tecnología implica la instalación de gran cantidad de sensores para abarcar toda la superficie de la máquina, lo que aumenta la posibilidad de fallo en alguno de los sensores. En el caso de instalación de radares láser, el coste de los dispositivos es elevado. Por otro lado, el funcionamiento de estos dispositivos puede verse alterado en función de las condiciones climatológicas. 2.- Control de la posición de las pasarelas mediante el cálculo de su ángulo de rotonda de entrada. En este sistema, se instala un dispositivo en cada una de las pasarelas para controlar, el ángulo de la pasarela. Cada una de las pasarelas conoce su posición y el de las pasarelas adyacentes, por lo que se define un ángulo por debajo del cual se activará la señal de parada de las pasarelas. El problema de este sistema es que para un mismo ángulo de parada definido en el software, la distancia entre pasarelas varia en gran medida en función de que estas estén en la posición de retracción o de extensión, con lo que un ajuste adecuado para que las pasarelas no colisionen en su posición de retracción puede ocasionar que la distancia entre ellas con las pasarelas extendidas sea tan grande que no permita el servicio a las puertas del avión. 3.- Control de la posición de la pasarela mediante el cálculo de su ángulo de rotonda de entrada y de la extensión de la pasarela. En este caso, para evitar los problemas existentes en el caso anteriormente descrito, se va variando el ángulo definido como de parada de pasarelas en función de la extensión de las mismas. De esta forma pueden ajustarse mejor la distancia entre pasarelas en todas las posiciones, aunque no se controla la posición de la cabina, con lo que estas pueden colisionar entre sí o con los túneles de las pasarelas adyacentes. 4.- Control de un área en la que las pasarelas no pueden entrar. Se instala un sistema de detección entre las columnas de la pasarela y barriendo una superficie entre las columnas y el avión, de forma que si alguna de las pasarelas entra en esta zona se activa una señal en la pasarela que invade la zona. Con este sistema se limita el rango de operación de las pasarelas y es necesario que los aviones se detengan en los puntos exactos. Descripción de la invención La presente invención tiene por objeto eliminar los problemas expuestos, mediante un sistema que evite de forma sencilla y precisa una posible colisión entre pasarelas, que podría acarrear efectos graves para la integridad de personas y de las pasarelas. Las pasarelas de acceso están generalmente constituidas por una rotonda de entrada sustentada por una columna, por un túnel telescópico, una ronda en la que finaliza el túnel telescópico, y por una cabina que gira en torno a la ronda. La pasarela incluye además un sistema de elevación que apoya en un sistema de rodadura. De acuerdo con el sistema de la invención se define para cada pasarela un sistema de ejes de coordenadas fijo, con origen en el centro de la rotonda de 3 entrada y eje de abscisas coincidente con el eje del túnel fijo o cuello de rotonda de entrada, y un sistema de ejes de coordenadas móvil respecto del sistema de coordenadas fijo, con origen en el centro de la ronda y eje de abscisas alineado con el eje del túnel telescópico y cuya posición está determinada por las coordenadas de su origen respecto del sistema de ejes de coordenadas fijo. Además, para cada pasarela y en cada momento, se define una serie de referencias, por sus coordenadas respecto del sistema de ejes de coordenadas fijo o móvil. Mediante un software de control se calcula, a partir de la posición de las referencias antes definidas, las distancias entre referencias de cada pasarela y las de las pasarelas adyacentes. A continuación se comparan entre sí los valores de las distancias calculadas y se toma el valor menor de ellos. Este valor menor tomado se compara con un valor de referencia para activar, a través del software de control, una velocidad lenta de desplazamiento de la pasarela o su parada, en caso de que el valor menor tomado fuese inferior que el valor de referencia. Las referencias definidas para cada pasarela pueden consistir en los ejes de las pasarelas, en puntos de referencia de dichas pasarelas o bien en puntos de referencia y ejes de las mismas. Según una forma preferida de ejecución, las referencias definidas para cada pasarela pueden consistir en una serie de puntos externos de la ronda y cabina, cuya posición se determina por sus coordenadas respecto del sistema de ejes de coordenadas móvil. Estos puntos de referencia pueden incluir además el origen del sistema de ejes de coordenadas móvil de cada pasarela, cuya posición se determina en cada momento por sus coordenadas respecto del sistema de ejes de coordenadas fijo de las pasarelas adyacentes. Las referencias definidas para cada pasarela pueden incluir además la posición del eje de cada pasarela, en función del ángulo formado entre dicho eje y el eje X del primer sistema de ejes de coordenadas fijo de dicha pasarela. También las referencias definidas para cada pasarela pueden incluir el ángulo formado entre el eje de cada pasarela y el eje de las pasarelas adyacentes. Con todo lo anterior, mediante el software de control y a partir de la posición determinada de puntos de referencia...
Reivindicaciones:
1. Sistema anticolisión entre pasarelas de acceso a aeronaves, especialmente entre pasarelas móviles, que comprenden una rotonda de entrada orientable conectada a la terminal a través de un túnel fijo o cuello de acceso una ronda con cabina orientable que se acopla a una puerta del avión, y un túnel transitable telescópico que discurre entre la rotonda de entrada y la ronda, caracterizado porque comprende: a) definir para cada pasarela un sistema de ejes de coordenadas fijo con origen en el centro de la rotonda de entrada y eje de abscisas coincidente con el eje del túnel fijo, y un sistema de eje de coordenadas móvil respecto del sistema de ejes de coordenadas fijo, con origen en el centro de la ronda y eje de abscisas alineado con el eje del túnel telescópico y cuya posición está determinada por las coordenadas de su origen respecto del sistemas de ejes de coordenadas fijo; b) definir para cada pasarela y en cada momento una serie de referencias, por sus coordenadas respecto uno de los sistemas de ejes de coordenadas fijo o móvil; c) calcular mediante, un software de control y a partir de la posición de las referencias antes definidas las distancias entre referencias de cada pasarela y la de las pasarelas adyacentes; d) comparar, entre sí los valores de las distancias calculadas y tomar el valor menor de ellas; y e) comparar el valor menor tomado con un valor de referencia para activar, a través del software de control, una velocidad lenta de desplazamiento de la pasarela o su parada, en caso de que el valor menor tomado fuese inferior que el valor de referencia. 2. Sistema según la reivindicación 1, caracterizado porque las referencias definidas para cada pasarela consisten en los ejes de las pasarelas. 3. Sistema según la reivindicación 1, caracterizado porque las referencias definidas para cada pasarela consisten en puntos de referencia de las pasarelas. 4. Sistema según la reivindicación 1, caracterizado porque las referencias definidas para cada pasarela consisten en puntos de referencia y ejes de las pasarelas. 5. Sistema según las reivindicaciones 1, 3 ó 4, caracterizado porque las referencias definidas para cada pasarela consisten en una serie de puntos de referencia externos de la ronda y cabina, cuya posición se determina por sus coordenadas respecto del sistema de ejes de coordenadas móvil. 6. Sistema según las reivindicaciones 1, 3 ó 4, caracterizado porque las referencias definidas para cada pasarela comprenden además el origen del sistema de ejes de coordenadas móvil de cada pasarela, cuya posición se determina en cada momento por sus coordenadas respecto del sistema de ejes de coordenadas fijo de las pasarelas adyacentes. 7. Sistema según las reivindicaciones 1 ó 2, caracterizado porque las referencias definidas para cada pasarela incluyen la posición del eje de cada pasarela, en función del ángulo alfa formado entre dicho eje y el eje X del sistema de ejes de coordenadas fijo 6 ES 2 357 223 A1 10 de dicha pasarela. 8. Sistema según la reivindicación 1, caracterizado porque las referencias definidas para cada pasarela incluyen el ángulo formado entre el eje de cada pasarela y el eje de las pasarelas adyacentes. 9. Sistema según las reivindicaciones anteriores, caracterizado porque mediante el software de control y a partir de la posición determinada por puntos y ejes de referencia considerados en cada momento se calcula la distancia entre puntos de referencia de cada pasarela y de las pasarelas adyacentes y entre puntos de referencia de cada pasarela y ejes de pasarelas adyacentes, cuyas distancias se introducen en un bloque función a cuya salida se obtiene la mínima de todas las distancias entre puntos de referencia y entre puntos de referencia y ejes de cada pasarela y pasarelas adyacentes, introduciéndose estas distancias mínimas en un segundo bloque que nos da a la salida la distancia mínima en cada momento entre pasarelas, la cual se compara con valores de referencia para, e su caso, la activación de una velocidad lenta de desplazamiento de la pasarela o su parada. 10. Sistema según la reivindicación 9, caracterizado porque los valores de referencia son configurables por el usuario. 11. Sistema según las reivindicaciones 3, 4, 5 ó 6, caracterizado porque en los puntos de referencia definidos en la ronda y cabina de cada pasarela se instalan sensores de medida de longitud y angular, que se conectan a módulos remotos o PLC individuales instalados en cada pasarela. 12. Sistema según la reivindicación 11, caracterizado porque comprende un PLC central que está en comunicación con los módulos remotos o PLC instalados en la pasarela y que contiene el software de control encargado de llevar a cabo el cálculo de las distancias citadas, para activar la velocidad lenta de desplazamiento de una pasarela o su parada. 13. Sistema según la reivindicación 12, caracterizado porque antes de iniciar operaciones de control de la posición de una pasarela, el PLC central procede al chequeo del estado de los sensores de medida, instalados en las pasarelas que intervienen en el cálculo para la definición de los puntos de referencia citados, y comprueba la comunicación entre dicho PLC central y los módulos remotos o PLC individuales instalados en las pasarelas, así como la calibración de dichas pasarelas. 14. Sistema según la reivindicación 1, caracterizado porque el eje X del sistema de ejes de coordenadas fijo está alineado con el eje del túnel fijo o cuello de rotonda de entrada. 15. Sistema según la reivindicación 1, caracterizado porque el eje del túnel móvil de cada pasarela pasa por el origen de los dos sistemas de ejes de coordenadas fijo y móvil de dicha pasarela. 16. Sistema según la reivindicación 12, caracterizado porque el dispositivo de control es un controlador lógico programable independiente. 17. Sistema según las reivindicaciones 12 y 16, caracterizado porque el software de control del sistema anticolisión corre en el propio controlador lógico programable de la pasarela. 18. Sistema según la reivindicación 9, caracterizado porque cuando la distancia entre puntos de referencia, ejes o puntos de referencia y ejes alcanza un cierto valor límite se activa una alarma que alerta de una colisión inminente. ES 2 357 223 A1 7 8 ES 2 357 223 A1 ES 2 357 223 A1 9 ES 2 357 223 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
Patentes similares o relacionadas:
Dispositivo indicador de posición de escotilla para puente de embarque, del 7 de Julio de 2020, de Korea Airports Corporation: Dispositivo indicador de posición de escotilla para puente de embarque.
El dispositivo indicador de posición de escotilla para un puente de embarque, dicho dispositivo […]
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Fuelle, p. ej. de un paso entre dos vehículos unidos el uno con el otro de forma articulada, del 27 de Mayo de 2020, de Hübner GmbH & Co. KG: Fuelle , de un paso entre dos vehículos unidos el uno con el otro de forma articulada, en donde el fuelle presenta varios marcos dispuestos […]
Módulo de acoplamiento para formar una interfaz entre la cabina de un puente de embarque de pasajeros y un avión, del 13 de Mayo de 2020, de Hübner GmbH & Co. KG: Módulo de acoplamiento para formar una interfaz entre la cabina de un puente de embarque de pasajeros y un avión, presentando el módulo de acoplamiento […]
PASARELA DE EMBARQUE CON MARQUESINA ACCIONADA MEDIANTE UN MECANISMO DE ACCIONAMIENTO AUTOBLOCANTE ALTAMENTE INTEGRADO PARA MARQUESINA, del 2 de Marzo de 2020, de MATIZ INTELLIGENT EQUIPMENT CO., LTD: Pasarela de embarque con marquesina giratoria accionada mediante un mecanismo de accionamiento autoblocante altamente integrado para marquesina.
La invención […]
Vehículo articulado, del 12 de Febrero de 2020, de Hübner GmbH & Co. KG: Vehículo articulado configurado a base de varias piezas de vehículo o bien vehículos unidos de forma articulada, por ejemplo, un tranvía o un autobús, de forma que entre los […]
Toldo y puente de embarque de pasajeros que incluye un toldo, del 30 de Octubre de 2019, de thyssenkrupp Airport Solutions, S.A: Toldo , adecuado para ser un componente de un puente de embarque de pasajeros, que comprende
- un marco fijo,
- un marco flexible, adecuado para […]
Unidad de elevación para pasarela de embarque de pasajeros, del 9 de Octubre de 2019, de ThyssenKrupp AG: Unidad de elevación para una pasarela de embarque de pasajeros , que comprende
- un miembro transversal ,
- dos postes de elevación , montados […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .