Procedimiento, programa de ordenador y dispositivo para determinar el riesgo de una colisión en el aire.
Un procedimiento para determinar la probabilidad de que un vehículo (100) colisione con un objeto (200) que comprende la etapa de:
- detectar el objeto, al capturar una imagen por medio de un sensor óptico (101) montado en el vehículo (100) y registrar el objeto (200) en la imagen,
- determinar a partir de una serie de imágenes capturadas por el sensor óptico (101) la posición y la velocidad relativas del objeto detectado (200), y de ese modo una posición, una dirección y una velocidad relativas al vehículo (100) por medio de una unidad (102) de seguimiento de objetivos dispuesta en el vehículo (100),
caracterizado por las etapas adicionales de:
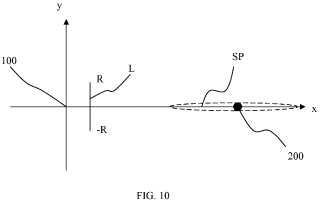
- determinar un proceso estocástico (SP, s (t) ), que representa una distancia relativa entre el vehículo (100) y el objeto detectado (200), teniendo el proceso estocástico (SP, s (t) ) una dirección y una velocidad constante s (t) =v (0) relativas al vehículo (100), en el que el proceso estocástico (SP, s (t) ) tiene valores iniciales estocásticos s (0) y v (0), en el que el proceso estocástico está definido por s (t) =s (0) +v (0) t en dos dimensiones,
- definir una zona de seguridad del vehículo con respecto al objeto detectado al aproximar una zona de seguridad como una línea recta (L) ubicada entre el objeto detectado (200) y el vehículo (100) perpendicular a una línea visual del objeto detectado (200), en el que la línea recta (L) está ubicada a una distancia R del vehículo (100) y tiene una longitud predeterminada de 2R, siendo R una distancia mínima de seguridad y
- determinar la probabilidad de colisión con el objeto detectado (200) durante un periodo de tiempo al considerar el proceso estocástico (SP, s (t) ), en el que la probabilidad de colisión con el objeto detectado está definida para que sea la probabilidad del proceso estocástico (SP, s (t) ), cruzando la línea recta (L), en base a una variable aleatoria φ que representa el tiempo t que tarda la distancia relativa a lo largo de la línea visual para disminuir hasta R, en el que se utiliza la posición del objeto detectado (200) con respecto al vehículo (100) como el valor inicial s (0) del proceso estocástico (SP, s (t) ), en el que se utilizan la dirección y la velocidad del objeto detectado (200) relativas al vehículo (100) a partir de la unidad (102) de seguimiento de objetivos como la dirección y la velocidad v (0) del proceso estocástico (SP, s (t) ) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07116447.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: NORDLUND, PER-JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S3/786 G01S […] › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › manteniéndose el estado deseado automáticamente.
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G06T7/20 G06T […] › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
PDF original: ES-2381761_T3.pdf
Fragmento de la descripción:
Procedimiento, programa de ordenador y dispositivo para determinar el riesgo de una colisión en el aire
Campo técnico
La invención versa acerca de un procedimiento, un programa de ordenador y un dispositivo para determinar la probabilidad de una colisión en el aire de vehículos. En particular, la invención versa acerca de la determinación del riesgo de una colisión en vehículos no tripulados.
Técnica antecedente Un problema fundamental que surge cuando se operan vehículos aéreos no tripulados (UAV) es cómo evitar colisiones en el aire de forma autónoma utilizando sensores a bordo. En la actualidad, dependiendo del tipo de espacio aéreo y de aeronave, las aeronaves tripuladas recurren ya sea a sistemas automáticos de evasión de colisiones basados en transpondedores como el TCAS (aeronaves comerciales) , o la vista de los pilotos para aeronaves más pequeñas utilizando Reglas de vuelo visual (VFR) . En la actualidad, la operación de UAV normalmente requiere que el espacio aéreo segregado excluya tráfico aéreo civil. La siguiente generación de UAV necesita ser capaz de volar de forma autónoma en espacio aéreo civil y, por lo tanto, también necesita un sistema autónomo de evasión de colisiones que detecte tanto vehículos basados en transpondedor como otras aeronaves sin transpondedores (paracaidistas, planeadores, otros UAV, etc.) .
Las aeronaves tripuladas que vuelan en un espacio aéreo controlado mantienen una distancia segura entre sí utilizando el servicio proporcionado por un Control del tráfico aéreo (ATC) . El ATC informa y da órdenes a pilotos humanos para que lleven a cabo maniobras para evitar Casi colisiones en el aire (NMAC) . Los sistemas semiautomáticos de la última década como el ACAS (Sistema de evasión de colisión en el aire) han sido implantados que traslada esencialmente esta responsabilidad del ATC al piloto. La OACI (Organización de aviación civil internacional) estipula que todas las aeronaves tripuladas con más de 19 pasajeros tengan un sistema ACAS. La presente implementación del ACAS (denominada TCAS II) da al piloto una advertencia (por ejemplo, "ascienda, ascienda") y un denominado Consejo de Resolución (RA) cuando el riesgo de colisión entre dos aeronaves supera un cierto umbral. Entonces, el piloto lleva a cabo la maniobra recomendada manualmente. Un enlace basado en transpondedores garantiza que el RA dado a los pilotos en ambas aeronaves es tal que se realiza la mejor maniobra conjuntamente para evitar una colisión.
Sin embargo, el sistema ACAS/TCAS supone que ambas aeronaves intercambian datos acerca de la velocidad, la altitud y el curso magnético por un enlace de transmisión de datos y que ambos sistemas cooperan. Cuando se operan UAV pequeños esta suposición a menudo deja de ser válida. Un UAV típico opera en altitudes en las que a menudo hay presentes pequeñas aeronaves intrusas que no tienen transpondedores. Este documento describe un procedimiento para detectar situaciones peligrosas en base a datos procedentes de un sensor pasivo del curso magnético únicamente.
Una de las dicotomías más importantes es la elección de propagación del vector de estado: nominal, del caso más desfavorable o probabilístico. El enfoque probabilístico proporciona un sistema de referencia que permite combinar las incertidumbres que se producen de forma natural en mediciones en un sistema de referencia estricto.
Un reto de los sensores de medición del curso magnético únicamente es cómo abordar la incertidumbre significativa obtenida en una distancia relativa estimada. Un enfoque para aumentar la precisión en la distancia estimada es llevar a cabo maniobras de la plataforma propia.
El documento US 20070210953 A1 da a conocer un sistema y un procedimiento para un sistema de detección y de evasión de colisiones y un procedimiento y una aeronave. El sistema de detección y de evasión de colisiones incluye un interrogador de imágenes que identifica amenazas de colisiones potenciales para la aeronave y proporciona maniobras para evitar cualquier amenaza identificada. Una unidad de seguimiento de múltiples objetivos de línea visual (LOS) hace un seguimiento de objetivos locales detectados y mantiene un historial de seguimiento en coordenadas de LOS para cada objetivo local detectado. Una unidad de evaluación de amenazas determina si cualquier objetivo local seguido supone una amenaza de colisión.
En los métodos de Monte Carlo las probabilidades se calculan para múltiples puntos de un área incierta en torno al objeto detectado. Se conoce que los métodos de Monte Carlo pueden aproximar probabilidades arbitrariamente bien. También se conoce que requieren mucho cálculo, en particular cuando las probabilidades subyacentes son pequeñas.
El objeto de la invención es proporcionar un procedimiento para calcular una probabilidad de casi colisión en el aire entre dos vehículos/objetos que puede ser llevado a cabo en un vehículo en tiempo real.
Resumen de la invención Las realizaciones de la presente invención abordan el problema de proporcionar un procedimiento para permitir un cálculo de una casi colisión en el aire en un vehículo en tiempo real.
La presente invención versa acerca de un procedimiento según la reivindicación 1.
La invención da a conocer un procedimiento para determinar la probabilidad de que un vehículo colisione con un objeto detectado que comprende las etapas de: detectar el objeto, al capturar una imagen por medio de un sensor óptico montado en el vehículo y registrar el objeto en la imagen, determinar, a partir de una serie de imágenes capturadas por el sensor óptico, la posición y la velocidad relativas del objeto detectado, y de ese modo una posición, una dirección y una velocidad relativas al vehículo, por medio de una unidad de seguimiento de objetivos dispuesta en el vehículo, que determina un proceso estocástico, que representa una distancia relativa entre el vehículo y el objeto detectado, teniendo el proceso estocástico una dirección y una velocidad constante s (t) =v (0) relativa al vehículo, en el que el proceso estocástico tiene valores iniciales estocásticos s (0) y v (0) , en el que el proceso estocástico está definido por s (t) =s (0) +v (0) t en dos dimensiones, que definen una zona de seguridad del vehículo con respecto al objeto detectado al aproximar una zona de seguridad como una línea recta ubicada entre el objeto detectado y el vehículo perpendicular a una línea visual del objeto detectado, en el que la línea recta está ubicada a una distancia R del vehículo y tiene una longitud predeterminada de 2R, siendo R una distancia mínima de seguridad y determinar la probabilidad de colisión con el objeto detectado durante un periodo de tiempo al considerar el proceso estocástico, estando definida la probabilidad de colisión con el objeto detectado para que sea la probabilidad del proceso estocástico, cruzando la línea recta, en base a una variable aleatoria τ que representa el tiempo t que tarda la distancia relativa a lo largo de la línea visual para reducirse hasta R, utilizándose la posición del objeto detectado con respecto al vehículo como el valor inicial s (0) del proceso estocástico, utilizándose la dirección y la velocidad del objeto detectado relativas al vehículo a partir de la unidad de seguimiento de objetivos como la dirección y la velocidad v (0) del proceso estocástico.
Además, la determinación de la probabilidad puede implicar, además, un sistema de coordenadas que es girado de forma que el eje x del sistema de coordenadas esté alineado con el eje x del sistema de coordenadas y que la línea recta de la zona de seguridad tenga dos puntos extremos y que definen una longitud predeterminada de la línea y que la línea recta sea perpendicular al eje x del sistema de coordenadas.
Además, se puede definir la zona de seguridad por medio de un plano rectangular o elíptico hacia el objeto detectado y el proceso estocástico está definido como una entidad tridimensional y el sistema de coordenadas comprende, además, un eje z.
En una realización, la colisión, casi colisión en el aire (NMAC) , entre el vehículo y el objeto puede ser expresada, en un sistema bidimensional, como NMAC (0, T ) ⇔ min s (t)
< R∩
s (0)
> R, 0<t<T
en la que s = distancia entre el vehículo y el objeto, R = la mitad de la longitud predeterminada de la zona de seguridad y la probabilidad de una colisión, P (NMAC) , está formulada como... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para determinar la probabilidad de que un vehículo (100) colisione con un objeto (200) que comprende la etapa de:
- detectar el objeto, al capturar una imagen por medio de un sensor óptico (101) montado en el vehículo 5 (100) y registrar el objeto (200) en la imagen,
- determinar a partir de una serie de imágenes capturadas por el sensor óptico (101) la posición y la velocidad relativas del objeto detectado (200) , y de ese modo una posición, una dirección y una velocidad relativas al vehículo (100) por medio de una unidad (102) de seguimiento de objetivos dispuesta en el vehículo (100) ,
caracterizado por las etapas adicionales de:
- determinar un proceso estocástico (SP, s (t) ) , que representa una distancia relativa entre el vehículo
(100) y el objeto detectado (200) , teniendo el proceso estocástico (SP, s (t) ) una dirección y una velocidad constante º (t) =v (0) relativas al vehículo (100) , en el que el proceso estocástico (SP, s (t) ) tiene valores iniciales estocásticos s (0) y v (0) , en el que el proceso estocástico está definido por s (t) =s (0) +v (0) t en dos dimensiones,
- definir una zona de seguridad del vehículo con respecto al objeto detectado al aproximar una zona de seguridad como una línea recta (L) ubicada entre el objeto detectado (200) y el vehículo (100) perpendicular a una línea visual del objeto detectado (200) , en el que la línea recta (L) está ubicada a una distancia R del vehículo (100) y tiene una longitud predeterminada de 2R, siendo R una distancia
mínima de seguridad y
- determinar la probabilidad de colisión con el objeto detectado (200) durante un periodo de tiempo al considerar el proceso estocástico (SP, s (t) ) , en el que la probabilidad de colisión con el objeto detectado está definida para que sea la probabilidad del proceso estocástico (SP, s (t) ) , cruzando la línea recta (L) , en base a una variable aleatoria τ que representa el tiempo t que tarda la distancia relativa a lo largo de
la línea visual para disminuir hasta R, en el que se utiliza la posición del objeto detectado (200) con respecto al vehículo (100) como el valor inicial s (0) del proceso estocástico (SP, s (t) ) , en el que se utilizan la dirección y la velocidad del objeto detectado (200) relativas al vehículo (100) a partir de la unidad (102) de seguimiento de objetivos como la dirección y la velocidad v (0) del proceso estocástico (SP, s (t) ) .
4. Un procedimiento según cualquiera de las reivindicaciones 1-2, en el que se expresa la colisión relativa a una casi colisión en el aire (NMAC) , entre el vehículo y el objeto como NMAC (0, T ) ⇔ min s (t) < R∩ s (0) > R, 0<t<T en la que s = distancia entre el vehículo y el objeto, R = mitad de la longitud predeterminada de la zona de seguridad 45 y la probabilidad de una colisión, P (NMAC) , está formulada como P (NMAC (0, T ) ) ≈ P (τ v < R∩τ < T) , y en la que τ = representa el tiempo que tarda la distancia en la dirección x en convertirse en al menos R 23 v = velocidad 5. Un procedimiento según la reivindicación 3, en el que se expresa la colisión relativa a una casi colisión en el aire (NMAC) , entre el vehículo y el objeto como NMAC (0, T) ⇔ min s (t) < R∩ s (0) > R, 0<τ <T en la que s = distancia entre el vehículo y el objeto, R = la mitad de la longitud predeterminada de la zona de seguridad y se formula la probabilidad de una colisión, P (NMAC) , como v < R∩τ < R∩τ < T) y vz en la que τ = representa el tiempo que tarda la distancia en la dirección x en convertirse en al menos R v = velocidad 6. Un procedimiento según la reivindicación 3, en el que se expresa la colisión relativa a una casi colisión en el 15 aire (NMAC) , entre el vehículo y el objeto como NMAC (0, T) ⇔ min s (t) < R∩ s (0) > R, 0<τ <T en la que s = distancia entre el vehículo y el objeto, R = el radio de la zona de seguridad y se formula la probabilidad de una colisión, P (NMAC) , como P (NMAC (0, T) ) ≈ P (τ vy 2 + vz 2 < R∩τ < T) en la que τ = representa el tiempo tarda la distancia en la dirección x en convertirse en al menos R v = velocidad 7. Un producto de programa de ordenador que cuando es ejecutado en una unidad de ordenador, tal como un procesador, ejecuta el procedimiento según cualquiera de las reivindicaciones 1-6. 8. Un procesador con un producto de programa de ordenador según la reivindicación 7 instalado en el mismo. 9. Un vehículo no tripulado que comprende un sensor óptico, una unidad de seguimiento de objetivos, y un procesador según la reivindicación 8. 30 2. Un procedimiento según la reivindicación 1, en el que la determinación de la probabilidad implica, además, un sistema de coordenadas que es girado de forma que el eje x del sistema de coordenadas está alineado con el eje x del sistema de coordenadas y en el que la línea recta de la zona de seguridad tiene dos puntos extremos (R, R) y (R, -R) que definen una longitud predeterminada de la línea y en el que la línea recta es perpendicular al eje x del sistema de coordenadas.
35 3. Un procedimiento según cualquiera de las reivindicaciones 1-2, en el que la zona de seguridad está definida por un plano rectangular o elíptico hacia el objeto detectado y el proceso estocástico está definido como una entidad tridimensional y en el que el sistema de coordenadas comprende, además, un eje z.
10 P (NMAC (0, T ) ) ≈ P (τ
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]