DISPOSITIVO Y PROCEDIMIENTO PARA MEDIR FUERZAS Y MOMENTOS.
Procedimiento para medir fuerzas y momentos que actúan sobre un cuerpo,
que comprende la aplicación sobre dicho cuerpo (11) de una estructura de medición (12), comprendiendo dicha estructura de medición (12) uno o más elementos, estando conectado dicho cuerpo (11) a dichos uno o más elementos a través de una pluralidad de elementos de conexión elásticos o ligaduras elásticas (17, 18, 37) de una manera estáticamente indeterminada; siendo tensionado dicho cuerpo (11) por unas fuerzas generalizadas descritas por el vector Fg = [Fx Fy Fz Tx Ty Tz] que va a ser determinado, definiéndose Fg por las componentes a lo largo de tres ejes de coordenadas de las fuerzas externas generalizadas, es decir, un vector de momento T y un vector de fuerza F orientados de cualquier modo, obteniéndose dicho vector Fg mediante la medición sobre dicha estructura de medición (12) de seis magnitudes en uno o más puntos, estando definidas dichas magnitudes por un vector S = [S1 S2 S3 S4 S5 S6]; caracterizado porque comprende la etapa de derivar los vectores F y T de una relación matemática entre Fg = [Fx Fy Fz Tx Ty Tz] y S = [S1 S2 S3 S4 S5 S6] para estructuras estáticamente indeterminadas, comprendiendo dicha relación matemática unas matrices que contienen términos dependientes de las dimensiones geométricas de dicha estructura de medición (12) y términos relacionados con la rigidez de dichos elementos de conexión elásticos o ligaduras elásticas (17, 18, 37)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2004/008247.
F16C11/12MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16CARBOLES; ARBOLES FLEXIBLES; MEDIOS MECANICOS PARA TRANSMITIR MOVIMIENTO EN UNA FUNDA FLEXIBLE; ELEMENTOS DE LOS MECANISMOS DEL CIGÜEÑAL; PIVOTES; UNIONES PIVOTANTES; PIEZAS ROTATIVAS DE INGENIERIA DISTINTAS A LAS PIEZAS DE TRANSMISION MECANICA, ACOPLAMIENTOS, EMBRAGUES O FRENOS; COJINETES. › F16C 11/00 Pivotes; Uniones pivotantes (disposición relativa de las articulaciones de la timonería de dirección B62D 7/16). › con uniones flexibles incorporados, p. ej. resortes de láminas.
G01L5/16FISICA. › G01METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 5/00 Aparatos o métodos para la medida de fuerzas, del trabajo, de la potencia mecánica o del par, especialmente adaptados a fines específicos. › para la medida de varios componentes de la fuerza.
Clasificación antigua:
F16C11/12F16C 11/00 […] › con uniones flexibles incorporados, p. ej. resortes de láminas.
G01L5/16G01L 5/00 […] › para la medida de varios componentes de la fuerza.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre.
Dispositivo y procedimiento para medir fuerzas y momentos. La presente invención se refiere a un dispositivo y a un procedimiento para medir fuerzas y momentos. En muchas aplicaciones (mecánicas y otras) es útil medir un vector de fuerza y un vector de momento aplicados a una estructura o a un cuerpo. Como ejemplo, podría ser necesario medir las fuerzas y momentos que actúan entre una goma de neumático y la superficie de la carretera. En general, se utilizan objetos o sensores rígidos, dispuestos entre las estructuras o elementos que intercambian fuerzas, para medir las fuerzas generalizadas que actúan entre dos estructuras o dos elementos. Un inconveniente de dichos sistemas es la complejidad del diseño, con una consiguiente masa y dimensiones grandes inaceptables para algunas aplicaciones. El documento D1, DE 41 01 732, describe un sensor de fuerza-momento que consiste en dos placas rígidas que están dispuestas paralelas en la condición libre de fuerza y que están acopladas entre sí. El acoplamiento anterior consiste en seis brazos, en la condición libre de fuerza de igual longitud, que tienen en su extremo dos articulaciones colocadas en cojinetes sobre las placas anteriores, siendo las articulaciones y los cojinetes rígidos con el fin de crear una estructura estáticamente determinada. El documento D3, FR 2 708 101, describe un sensor de fuerza-momento con el fin de encontrar el par y el momento de flexión que actúan sobre un cuerpo. El documento D5, FR 2 696 002, muestra un sensor de fuerza-momento con una estructura tetraédrica que está estáticamente determinada. El objetivo de la presente invención es la de materializar un dispositivo y definir un procedimiento para medir fuerzas y momentos, también apto para medir esfuerzos dinámicos. Otro objetivo de la presente invención es realizar un dispositivo para medir fuerzas y momentos que sea preciso y sensible. Otro objetivo de la presente invención es realizar un dispositivo y definir un procedimiento para medir fuerzas y momentos, que sean particularmente simples y funcionales, con un coste reducido. Estos objetivos según la presente invención se alcanzan realizando un dispositivo y definiendo un procedimiento para medir fuerzas y momentos como los que se explican en las reivindicaciones independientes. Se prevén otras características en las reivindicaciones dependientes. Las características y ventajas de un dispositivo y un procedimiento para medir fuerzas y momentos según la presente invención se pondrán más claramente de manifiesto a partir de la siguiente descripción, proporcionada a título de ejemplo no limitativo, haciendo referencia a los dibujos esquemáticos adjuntos, en los que: - la figura 1 muestra esquemáticamente una primera forma de realización de un dispositivo para medir fuerzas y momentos según la presente invención; el dispositivo está sometido a unas fuerzas generalizadas T y F; - la figura 2 es una vista desde arriba de una posible forma de realización del dispositivo de la figura 1; - la figura 3 es una sección según la línea III-III de la figura 2, mostrada ampliada; - la figura 4 muestra un elemento de conexión de tipo rótula esférica y deslizante realizado por medio de un elemento de elastómero; - la figura 5 muestra esquemáticamente otra rótula esférica y deslizante realizada por medio de unos elementos elásticos; - las figuras 6 a 8 muestran esquemáticamente una segunda forma de realización de un dispositivo para medir fuerzas y momentos según la presente invención, sometido a unas fuerzas generalizadas T y F; - la figura 9 muestra otra forma de realización esquemática del dispositivo de las figuras 6-8; - la figura 10 es una representación esquemática de una junta de Hooke elástica con elementos de flexión, que materializa un elemento de conexión elástico; 2 E04741237 05-01-2012 - las figuras 11 y 12 muestran una posible forma de realización de la junta de Hooke elástica con elementos de flexión de la figura 10; y - las figuras 13 a 15 muestran esquemáticamente una forma de realización adicional de un dispositivo para medir fuerzas y momentos según la presente invención, sometido a unas fuerzas generalizadas T y F. Con referencia a las figuras, se muestra un dispositivo para medir fuerzas y momentos, indicado completamente con 10, mostrado en tres realizaciones diferentes según la invención. El dispositivo para medir fuerzas y momentos comprende una estructura de medición 12 compuesta por uno o más elementos y provista de una pluralidad de ligaduras o elementos de conexión para establecer una conexión entre los elementos de la propia estructura y/o un cuerpo en la cual se desea averiguar las fuerzas que actúan sobre él, de tal manera que la estructura 12 esté estáticamente indeterminada. La estructura de medición 12 está sometida a dos fuerzas externas generalizadas, un vector de momento T y un vector de fuerza F, orientadas de cualquier forma, que son las fuerzas externas generalizadas que se desea medir y que actúan sobre el cuerpo. Para dichas estructuras de medición es posible establecer una relación matemática entre el vector Fg = [Fx Fy Fz Tx Ty Tz] (definido por las componentes a lo largo de tres ejes de coordenadas de las fuerzas externas generalizadas F y T) y el vector S = [S1 S2 S3 S4 S5 S6] de magnitudes medidas en uno o más puntos de la estructura. Las magnitudes medidas pueden ser deformaciones locales, cargas eléctricas generadas por deformaciones, variaciones de resistencia eléctrica debido a variaciones en deformaciones locales u otras, y pueden ser detectadas por medios de medición adecuados 14 dispuestos en la estructura 12. En el caso estático, dicha relación puede ser del tipo Fg = Fg (S). Dicha relación matemática puede ser lineal, en cuyo caso los cálculos para definir Fg, conociendo el vector S, son, en realidad, relativamente simples: siendo C una matriz cuadrada invertible de orden 6. En el caso dinámico la relación matemática puede ser del tipo: en la que u es un vector que representa una alteración que es variable en el tiempo. En el caso en el que el sistema sea lineal, las ecuaciones dinámicas pasan a ser: en las que A, B, C y D son matrices. En el caso de estructuras estáticamente determinadas, las matrices C, A, B, C, D contienen principalmente términos dependientes de las dimensiones geométricas del dispositivo de medición; en el caso de estructuras estáticamente indeterminadas, las matrices C, A, B, C, D contienen tanto los términos dependientes de las dimensiones geométricas del dispositivo de medición como los términos relacionados con la rigidez, en particular, de las conexiones (juntas elásticas). Las figuras 1 a 3 muestran una primera forma de realización con tres ligaduras de un dispositivo para medir fuerzas y momentos 10 según la presente invención, en particular adecuado, entre otras cosas, para montarse sobre el cubo de una rueda, no mostrada, para medir las fuerzas generalizadas que actúan sobre la propia rueda. El dispositivo comprende las estructuras de medición 12 configuradas con tres brazos 15, por ejemplo dispuestos a 3 E04741237 05-01-2012 120º, que llevan en el extremo 16 los elementos de conexión o ligaduras que consten en tres rótulas esféricas 17 que son libres de trasladarse en la dirección del eje de los brazos 15 gracias a la limitación 18 de tipo deslizante realizada por medio de un manguito. En las figuras 1 a 3, como ejemplo, se muestran los brazos rectos 15, pero, por supuesto, la estructura de medición 12 puede consistir en un elemento que tenga tres brazos 15 con una forma más compleja. Con las limitaciones que consisten en unas rótulas esféricas 17 y unos elementos deslizantes 18, cada brazo 15 de la estructura 12 está sometido a dos momentos de flexión que actúan ortogonalmente. Los dos esfuerzos de flexión, que son generados por los dos momentos de flexión perpendiculares antes mencionados, pueden ser medidos por dos pares de galgas extensiométricas 14a y 14b, como se muestra en las figuras 2 y 3, que constituyen un ejemplo de posibles medios de medición. En una primera forma de realización, mostrada esquemáticamente en la figura 2 en una vista en sección parcial, las ligaduras dispuestas en el extremo de los brazos 15, en otras palabras las rótulas esféricas 17 con las correderas 18, pueden materializarse por medio de elementos elásticos con características adecuadamente definidas para evitar la introducción de errores significativos en la medición de las fuerzas generalizadas T y F. Por ejemplo, el elemento de conexión según uno de los ejes x y/o y y/o z puede ser un soporte elástico que sea muy rígido en la dirección radial y muy flexible en las otras direcciones. Por ejemplo, la figura 4 muestra, en una vista en sección parcial, una limitación del tipo de rótula esférica elástica y corredera elástica materializada... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para medir fuerzas y momentos que actúan sobre un cuerpo, que comprende la aplicación sobre dicho cuerpo (11) de una estructura de medición (12), comprendiendo dicha estructura de medición (12) uno o más elementos, estando conectado dicho cuerpo (11) a dichos uno o más elementos a través de una pluralidad de elementos de conexión elásticos o ligaduras elásticas (17, 18, 37) de una manera estáticamente indeterminada; siendo tensionado dicho cuerpo (11) por unas fuerzas generalizadas descritas por el vector Fg = [Fx Fy Fz Tx Ty Tz] que va a ser determinado, definiéndose Fg por las componentes a lo largo de tres ejes de coordenadas de las fuerzas externas generalizadas, es decir, un vector de momento T y un vector de fuerza F orientados de cualquier modo, obteniéndose dicho vector Fg mediante la medición sobre dicha estructura de medición (12) de seis magnitudes en uno o más puntos, estando definidas dichas magnitudes por un vector S = [S1 S2 S3 S4 S5 S6]; caracterizado porque comprende la etapa de derivar los vectores F y T de una relación matemática entre Fg = [Fx Fy Fz Tx Ty Tz] y S = [S1 S2 S3 S4 S5 S6] para estructuras estáticamente indeterminadas, comprendiendo dicha relación matemática unas matrices que contienen términos dependientes de las dimensiones geométricas de dicha estructura de medición (12) y términos relacionados con la rigidez de dichos elementos de conexión elásticos o ligaduras elásticas (17, 18, 37). 2. Procedimiento según la reivindicación 1, caracterizado porque en una estructura de medición (12), que comprende tres brazos (15) que llevan en el extremo (16) dichos elementos de conexión que consisten en unas rótulas esféricas (17) libres de trasladarse en la dirección del eje de los brazos (15) gracias a una ligadura adicional (18) de tipo corredera, se miden seis momentos de flexión, siendo dichos seis momentos dos momentos de flexión perpendiculares para cada brazo. 3. Procedimiento según la reivindicación 1, caracterizado porque en una estructura de medición, que comprende dos elementos rígidos triangulares, una placa superior (25) y una placa inferior (26), enlazadas juntas en los respectivos tres vértices (25A, 25B, 25C, 26d, 26e y 26f) a través de dos bielas (27) para cada vértice, siendo aptas dichas bielas (27) para unir dos vértices contiguos del triángulo opuesto (25, 26) a través de unos elementos de conexión realizados por medio de unas rótulas esféricas (17), se miden seis acciones axiales, una por cada biela. 4. Procedimiento según la reivindicación 1, caracterizado porque en una estructura de medición, que comprende dos elementos rígidos triangulares, una placa superior (25) y una placa inferior (26), enlazadas juntas en los respectivos tres vértices (25A, 25B, 25C, 26d, 26e y 26f) a través de tres elementos de cáscara (36) conectados a dicho elemento inferior (25) y a dicho elemento superior (26), respectivamente, a través de una ligadura de tipo articulación y carro (37) y una rótula esférica (17), se miden tres acciones axiales y tres momentos de flexión en tres elementos. 5. Procedimiento según la reivindicación 1, caracterizado porque dichas seis mediciones se llevan a cabo por medio de unas galgas extensiométricas (14). 6. Dispositivo para medir fuerzas y momentos que actúan sobre un cuerpo, que comprende una estructura de medición (12) compuesta por uno o más elementos y provista de una pluralidad de elementos de conexión elásticos o ligaduras elásticas para la conexión entre los elementos de la estructura (12) y dicho cuerpo (11) sometido a fuerzas generalizadas, es decir, un vector de momento T y un vector de fuerza F orientados de cualquier modo descrito por el vector Fg = [Fx, Fy, Fz, Tx, Ty, Tz] que se desea medir, en el que dicha estructura (12) es estáticamente indeterminada, estando equipada dicha estructura (12) con unos medios para medir (14) en uno o más puntos, seis magnitudes de esfuerzo S = [S1 S2 S3 S4 S5 S6] y/o deformación a partir de las cuales pueden calcularse matemáticamente el vector de fuerza F = [Fx, Fy, Fz] y el vector de momento T = [Tx Ty Tz] que actúan sobre el cuerpo (11), caracterizado porque dicho dispositivo comprende además unos medios adaptados para calcular matemáticamente el vector de fuerza F = [Fx, Fy, Fz] y el vector de momento T = [Tx Ty Tz] que actúan sobre el cuerpo a partir de dichas seis magnitudes de esfuerzo y/o deformación medidas y a partir de unas matrices que contienen términos dependientes de la dimensión geométrica de dicha estructura de medición (12) y términos relacionados con la rigidez de dichos elementos de conexión elásticos o ligaduras elásticas (17, 18, 37). 7. Dispositivo según la reivindicación 6, caracterizado porque dicha estructura (12) comprende tres brazos (15) que llevan en el extremo (16) unos elementos de conexión que consisten en unas rótulas esféricas (17) libres de trasladarse en la dirección del eje de los brazos (15) gracias a una ligadura adicional (18) de tipo corredera recta. 8. Dispositivo según la reivindicación 7, caracterizado porque dichas rótulas esféricas (17) con una corredera (18) consisten en un soporte elástico que es rígido en su dirección radial y flexible en la otra dirección, comprendiendo un elemento realizado a partir de elastómero (19) insertado en uno o dos elementos de contención (20), dentro de los cuales se coloca el extremo (16) de dicho brazo (15). 9. Dispositivo según la reivindicación 7, caracterizado porque dichas rótulas esféricas (17) con una corredera (18) consisten en una junta de Hooke elástica (21) equipada con unos casquillos de holgura y fricción nulas (23), dispuesta en serie con una articulación cilíndrica elástica (22) que consiste en un casquillo adicional de holgura y fricción nulas (23), apto para realizar una rótula esférica con holgura y fricción prácticamente nulas, colocado en serie con una placa delgada con cuatro extremos fijos (24) que ceden elásticamente de manera axial, apta para 7 E04741237 05-01-2012 realizar una ligadura (18) de tipo corredera. 10. Dispositivo según la reivindicación 7, caracterizado porque cada uno de dichos brazos (15) está equipado con dos pares de galgas extensiométricas (14a, 14b), siendo aptos dichos medios de medición (14) para medir dos momentos de flexión perpendiculares que actúan en cada brazo (15). 11. Dispositivo según la reivindicación 6, caracterizado porque dicha estructura comprende dos elementos rígidos triangulares, una placa superior (25) y una placa inferior (26), unidas juntas en los respectivos tres vértices (25A, 25B, 25C, 26d, 26e y 26f) a través de dos bielas (27) para cada vértice, siendo aptas dichas bielas (27) para enlazar dos vértices contiguos del triángulo opuesto (25, 26) a través de unos elementos de conexión realizados por medio de unas rótulas esféricas (17). 12. Dispositivo según la reivindicación 11, caracterizado porque dichas rótulas esféricas (17) son elásticas y se llevan a cabo por medio de elementos realizados a partir de elastómero diseñados con baja rigidez en rotación. 13. Dispositivo según la reivindicación 11, caracterizado porque dichas rótulas esféricas (17) consisten en una junta de Hooke elástica (21) equipada con unos casquillos de holgura y fricción nulas (23), dispuesta en serie con una articulación cilíndrica elástica (22) que consiste en un casquillo adicional de holgura y fricción nulas (23). 14. Dispositivo según la reivindicación 11, caracterizado porque dichas rótulas esféricas (17) consisten en una junta de Hooke elástica con unos elementos de flexión (28) que comprenden una cruceta (33) que consiste en dos brazos perpendiculares (34) unidos por un travesaño de separación (35), en el que dos pares de placas delgadas (31, 32), aptas para realizar una doble articulación con ejes perpendiculares y fricción y holgura prácticamente nulas, están enlazadas con los brazos (34). 15. Dispositivo según la reivindicación 14, caracterizado porque cada uno de dichos pares de placas delgadas (31, 32) está conectado en el extremo opuesto con respecto a la cruceta (33) a un elemento de horquilla (30) apto para formar una sola pieza con las partes que van a ser interconectadas. 16. Dispositivo según la reivindicación 11, caracterizado porque dichas bielas (27) están equipadas con unos medios para medir (14) la fuerza de tracción o compresión axial a la cual son sometidas. 17. Dispositivo según la reivindicación 6, caracterizado porque dicha estructura (12) comprende dos elementos rígidos triangulares, una placa superior (25) y una placa inferior (26), unidas juntas en los respectivos tres vértices (25A, 25B, 25C, 26d, 26e y 26f) a través de tres elementos de cáscara (36) conectados a dicho elemento inferior (25) y a dicho elemento superior (26), respectivamente, a través de una ligadura de tipo articulación y carro (37) y una rótula esférica (17). 18. Dispositivo según la reivindicación 17, caracterizado porque dicha ligadura de tipo articulación y carro (37) consiste en la combinación de cojinetes lisos, cojinetes de bolas radiales o bien un manguito con bolas y/o rodillos. 19. Dispositivo según la reivindicación 17, caracterizado porque dichas rótulas esféricas (17) son rígidas y se realizan por medio de rótulas esféricas, cojinetes autoalineables o bien cojinetes de bolas radiales equipados con una holgura adecuada. 20. Dispositivo según la reivindicación 17, caracterizado porque dichos elementos (36) están equipados con unos medios (14) para medir la flexión y la acción axial a la cual son sometidos. 8 E04741237 05-01-2012 9 E04741237 05-01-2012 E04741237 05-01-2012 11 E04741237 05-01-2012 12 E04741237 05-01-2012 13 E04741237 05-01-2012
Patentes similares o relacionadas:
Dispositivo para la medición de altura con tope para cabeza, del 16 de Octubre de 2019, de seca ag: Dispositivo para la medición de altura de personas, que presenta un elemento vertical y un tope para cabeza dispuesto de forma posicionable […]
Pivote flexible de gran ángulo, del 11 de Septiembre de 2019, de Almatech SA: Pivote flexible que comprende una primera plataforma que comprende una primera estructura de interfaz y una segunda plataforma que […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Unión mecánica, del 1 de Mayo de 2019, de ULTRA ELECTRONICS LIMITED: Unión mecánica , comprendiendo la unión mecánica un primer brazo , un segundo brazo , un elemento de interconexión , y un elemento flexible , en la […]
Sistema de motorización para articulación de medios de devanado cruzados con rodamiento fiabilizado, del 10 de Abril de 2019, de THALES: Dispositivo de articulación de rodamiento que comprende dos cilindros (1a, 1b) de devanado sustancialmente paralelos, medios de devanado que forman elemento […]
Mecanismo de regulación de una velocidad media en un movimiento de relojería y movimiento de relojería, del 31 de Enero de 2019, de Société anonyme de la Manufacture d'Horlogerie Audemars Piguet & Cie: Mecanismo de regulación de una velocidad media en un movimiento de relojería, que comprende una rueda de escape y un oscilador mecánico , comprendiendo […]
DISPOSITIVO DE ARTICULACIÓN, del 1 de Febrero de 2017, de CONSORCI PER A LA CONSTRUCCIÓ, EQUIPAMENT I EXPLOTACIÓ DEL LABORATORI DE LLUM DE SINCROTRÓ: Dispositivo de articulación; que comprende una primera parte , una segunda parte y una tercera parte de articulación que conecta dichas primera y segunda partes, […]
Cabeza de medición para palpador para piezas de trabajo que se van a mecanizar, del 21 de Enero de 2015, de BALANCE SYSTEMS S.R.L.: Una porción de cabeza de medición para un palpador de piezas de trabajo que se están mecanizando, que comprende: una porción fija que debe asegurarse […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]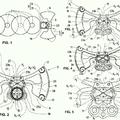 Mecanismo de regulación de una velocidad media en un movimiento de relojería y movimiento de relojería, del 31 de Enero de 2019, de Société anonyme de la Manufacture d'Horlogerie Audemars Piguet & Cie: Mecanismo de regulación de una velocidad media en un movimiento de relojería, que comprende una rueda de escape y un oscilador mecánico , comprendiendo […]
Mecanismo de regulación de una velocidad media en un movimiento de relojería y movimiento de relojería, del 31 de Enero de 2019, de Société anonyme de la Manufacture d'Horlogerie Audemars Piguet & Cie: Mecanismo de regulación de una velocidad media en un movimiento de relojería, que comprende una rueda de escape y un oscilador mecánico , comprendiendo […]