Herramienta y método de aplicación automática remota de tiras de cinta con polímero reforzado con fibra (FRP) con adhesivo epóxico.
Herramienta (1) y método para la aplicación automática y remota de tiras de cinta con polímero reforzado con fibra (FPR),
de las que carecen de adhesivo en el recubrimiento de superficies planas y/o curvas de elementos de construcción. Esta herramienta comprende un bastidor en la que se acoplan un rodillo de cinta FRP, un medio de dispensación de cinta FRP mediante rodillos de guía, un rodillo motriz, un medio de compresión para embeber dicha cinta en un adhesivo, y al desplazar la herramienta (1) sobre la superficie proporciona potencia transmitida a un medio de dispensación de cinta FRP ajustada de forma que la velocidad de dispensación de cinta FRP es sustancialmente similar a la de desplazamiento de la herramienta (1), y permite un método de aplicación automático y remoto.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030654.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ DE LA CASA DIAZ,SANTIAGO, JARDON HUETE,ALBERTO, BALAGUER BERNALDO DE QUIROS,CARLOS, GONZALEZ VICTORES,Juan Carlos.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65H16/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 16/00 Desenrollado o devanado de bandas. › de tipo con rodillos paralelos.
- B65H19/18 B65H […] › B65H 19/00 Cambio de la bobina. › Fijación, p. ej. por encolado, de la banda de sustitución con la que se termina.
- B65H19/20 B65H 19/00 […] › Corte de la banda que se termina.
Fragmento de la descripción:
Herramienta y método de aplicación automática remota de tiras de cinta con polímero reforzado con fibra (FRP) con adhesivo epóxico.
Campo técnico de la invención
La invención proporciona una herramienta y un método de aplicación automática remota de tiras de cinta con polímero reforzado con fibra (FPR) con adhesivo epóxico, del tipo de las que carecen de adhesivo en el recubrimiento de superficies planas y/o curvas de elementos de construcción como bóvedas de túneles, arcos parabólicos, catenarios y otros antifuniculares característicos de puentes y gran cantidad de construcciones modernas.
Estado de la técnica
La presente invención se refiere a técnicas para el recubrimiento de elementos en construcciones con polímero reforzado con fibra. Estos plásticos (FRP, Fibre-Reinforced Polymer, polímero reforzado con fibra) están fabricados de un material compuesto de una matriz de un polímero reforzado con fibras como la fibra de vidrio, la fibra de de carbono, aramid o similar, y permiten proteger las superficies en construcciones o elementos que componen dichas construcciones.
En el estado de la técnica son conocidos aplicadores de cinta FRP manuales, que implican una inversión de recursos ineficiente, cara y lenta; es decir, para aplicar una cinta FRP un operario dispone de ambos trozos de una barra lisa y cilíndrica de madera a la que se le ha realizado una sección transversal que atraviesa el eje de rotación. El operario sostiene el fin del rollo comercial de FRP entre ambos trozos, y la enrolla alrededor de la barra ya completa. Al cortar la fibra se utilizan medios de corte como tijeras industriales, lo que eventualmente hace que durante el corte el FRP se degrade, deshilachándose eventualmente.
El operario esparce resina epóxica en la superficie a tratar ayudado por un útil como una brocha. Después, el operario apoya la barra en esta superficie y desenrolla, haciendo presión con la propia barra hasta que la cinta FRP quedar totalmente adherida, tras lo cual retira la barra, y pasa un rodillo manual, limitándose la presión ejercida sobre la cinta a la determinada por la superficie del rodillo y la fuerza del operario. Las operaciones anteriores ralentizan considerablemente el proceso puesto que son necesarias varias pasadas.
El procedimiento de aplicación utilizando cinta FRP preimpregnada es llevado a cabo, de forma similar, por un operario. Entre sus desventajas se cuentan que no sólo las molestias derivadas de la impregnación por parte de dicho operario por la resina, sino que estas cintas deben conservarse en condiciones que impidan el fraguado de la resina, por ejemplo manteniendo las cintas preimpregnadas a temperaturas superiores a las de fraguado de la resina.
Existe por tanto una demanda de automatizar la aplicación de cinta FRP minimizándose el desperdicio de material. Cuando se automatiza este proceso, una opción presente en el estado de la técnica comprende montar la herramienta sobre un medio de manipulación que proporcione la capacidad de situar y mover dicho aplicador, como un brazo robótico o similar (e.g. robots Kuka para colocar cristal en techos: C. Han, Design of a Ceiling Glass Installation Robot, http://www.iaarc.org/external/isarc2007-cd/www/PDF/2.4_5_076.pdf) . Por tanto, cuanto mayor masa y dimensiones tenga la herramienta, mayores esfuerzos y momentos habrán de soportar las partes de estos medios de manipulación. Además la manipulación de esta herramienta a distancia implica que se ha de suministrar al operador del brazo información del brazo en función de parámetros tales como la distancia a la superficie y el recubrimiento logrado.
Para permitir la aplicación de los medios adhesivos la superficie debe de estar desprovista de contaminación, como aquellos que utilizan agua o arena. Además, las fisuras y discontinuidades en una superficie de unos elementos de construcción, presentes como consecuencia de los distintos procesos tras el fraguado de hormigones, movimientos de terrenos heterogéneos y similares, hacen que estas superficies presenten fisuras y discontinuidades que reducen la adhesión de los elementos de recubrimiento y en especial las tiras de FRP. Por tanto es deseable que se proporcione una superficie que reduzca y más preferiblemente, que carezca de, estas fisuras y discontinuidades. Típicamente estas fisuras tienen espesores entre2y20mm, con longitudes de hasta 1 m, presentando además zonas que aparentemente no superan un tamaño típico de hasta 10 mm pero que ocultan cavidades de tamaño muy superior a éste. Estas últimas estructuras no son bien tratadas por aquellas aplicaciones manuales.
Es posible minimizar estos problemas recubriendo la superficie, y en especial las fisuras presentes en el elemento de construcción mediante la aplicación de un medio para la preparación como una resina. En la aplicación de aquellas cintas FRP que carecen de adhesivo es necesario dispensar dicho adhesivo (generalmente una resina epóxica o “epoxy” conocidos en el estado de la técnica para cada FRP) antes de la dispensación de la cinta. En tanto aumente el intervalo entre la dispensación de la resina epóxica y la cinta FRP se degrada la adherencia química y se aumenta la exposición de la resina a contaminantes.
Un problema presente en el estado de la técnica es el relacionado con la aplicación óptima de la cinta para que la adhesión sea óptima, como por ejemplo la corrugación de la cinta aplicada en la superficie. Esto no permite una dispensación uniforme de la cinta de FRP para que las propiedades mecánicas del conjunto elemento de construcciónrecubrimiento sean óptimas. Para ello la herramienta debe ser capaz de colocar una tira de cinta de FRP sobre una capa de una resina (generalmente tipo epoxy) previamente depositada de una forma uniforme sin aplicar sobre la cinta tensiones que eventualmente despeguen dicha cinta, como por ejemplo cuando la velocidad de desplazamiento de la herramienta sobre la superficie del elemento de construcción es mayor que la velocidad de dispensación de la cinta. Por otro lado, si la velocidad de desplazamiento de la herramienta sobre la superficie del elemento de construcción es mucho menor que la de dispensación de la cinta, se forman pliegues en la cinta, de forma que el recubrimiento presenta corrugaciones. Estas corrugaciones serán las que se replieguen si la superficie debilitada trata de expandirse. Además, estas corrugaciones contienen regiones (similares a burbujas) de aire que degradan la adhesión a la superficie del elemento de construcción.
Si la herramienta no fuera capaz de proporcionar una tira de cinta (cortando dicha cinta) sería necesario cortar la cinta manualmente, lo que ralentiza el procedimiento y disminuye la eficiencia de la aplicación de un recubrimiento.
Además, para su uso de forma automatizada y remota se necesita que el operador reciba información tanto de la posición de la herramienta respecto a la superficie del elemento de construcción -pues el recubrimiento ha de dispensar la cinta siguiendo a la superficie del elemento de construcción (curvatura, accidentes, etc.) -como de una inspección del estado de la misma de forma remota evitando impactos de la herramienta contra la superficie.
Por tanto, es necesario proporcionar una herramienta que permita la aplicación de un recubrimiento sobre las superficies de elementos de construcción con cinta FRP, comprendiendo la dispensación de tiras de cinta de FRP, embebida en una resina epoxídica, que no presente corrugaciones indebidas en el recubrimiento, y sin provocar tensiones que despeguen cinta ya pegada, consiguiendo así una superficie recubierta en donde se combinan las propiedades de la cinta FRP y de la superficie de la estructura, mejorando así sensiblemente las propiedades mecánicas (e.g. la elasticidad) del recubrimiento de dicha estructura.
Descripción de la invención
Éstos y otros problemas son solucionados en la presente invención mediante una herramienta que permite la preparación de la superficie de un elemento de construcción para la dispensación, embebido y corte de una tira de FRP del tipo no preimpregnado de adhesivo, de forma automática y remota según la reivindicación 1 independiente. Además, se describe un procedimiento según la reivindicación 14 independiente para la aplicación remota y automatizada de cintas de FRP. Otros aspectos de la invención y realizaciones particularmente ventajosas de la misma se encuentran definidos en las reivindicaciones dependientes.
En...
Reivindicaciones:
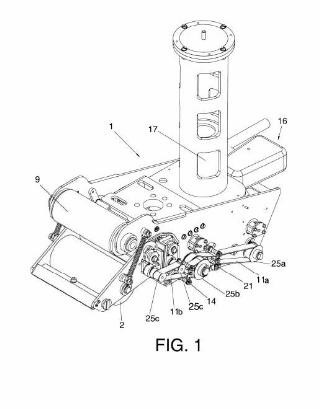
1. Herramienta (1) conectable a un medio de manipulación de aplicación automática remota de tiras de cinta con polímero reforzado con fibra (FRP) , del tipo no impregnado de adhesivo, y un adhesivo epóxico sobre superficies (20) , curvas o planas, de elementos de construcción tales como bóvedas de túneles, caracterizada porque comprende:
- un rodillo prensor (2) ; -un medio motriz que comprende un rodillo motriz (5) ; -un medio de transmisión de potencia; -un medio dispensador de resina (8) ; -un medio de dispensación de tiras de FRP que a su vez comprende:
- un rodillo de dispensación (3) ; -un medio de corte (6) ; -al menos dos rodillos de guía (6a, 6b) ; y
- un medio de almacenamiento de cinta de FRP (9) ; en donde el rodillo de dispensación (3) y el rodillo motriz (5) están conectados mediante el medio de transmisión de potencia con dimensiones adaptadas para proporcionar una relación de transmisión tal que la velocidad de dispensación de cinta FRP es sustancialmente similar a la velocidad de avance al desplazar la herramienta (1) sobre la superficie (20) .
2. Herramienta (1) según la reivindicación 1 en el que el medio de transmisión de potencia comprende al menos un primera polea (25a) , una segunda polea (25b) y una correa (11a) , en donde
la primera polea (25a) está unida al rodillo motriz (5) y la segunda polea (25b) está unida al rodillo de dispensación (3) ,
guardando los diámetros de la primera y segunda polea (25a, 25b) una relación inversa a la relación de diámetros entre el rodillo motriz (5) y el rodillo de dispensación (3) ,
y particularmente una relación 1:1.
3. Herramienta (1) según la reivindicación 2 que comprende una tercera polea (25c) y una segunda correa (11b) unida al menos a un rodillo de guía (6a) ,
guardando una relación entre los diámetros de dicha tercera polea (25c) y la segunda polea (25b) una relación inversa a la relación de diámetros entre el rodillo de dispensación (3) y el al menos un rodillo de guía (6a) ,
y particularmente una relación entre los diámetros de dicha tercera polea (25c) y la segunda polea (25b) de 3:1.
4. Herramienta (1) según cualquiera de las reivindicaciones 1a3en donde el rodillo motriz (5) está fabricado o recubierto de goma, tachuela o silicona, lija, particularmente de juntas tóricas con acabados en granallado.
5. Herramienta (1) según la reivindicación 4 en donde el recubrimiento de la superficie del rodillo motriz (5) se une de forma desmontable al rodillo motriz (5) , y más particularmente mediante velcro.
6. Herramienta (1) según cualquiera de las reivindicaciones 1 a 5 que comprende un soporte cuchilla y un conjunto de accionadores, particularmente microactuadores neumáticos.
7. Herramienta (1) según cualquiera de las reivindicaciones1a6que comprende un saliente (13) situado entre el rodillo de dispensación (3) y el rodillo prensor (2) .
8. Herramienta (1) según cualquiera de las reivindicaciones1a7que comprende una zona adaptada para recibir medios de limpieza de la superficie (20) , en particular para alojar un medio dispensador de aire comprimido.
9. Herramienta (1) según cualquiera de las reivindicaciones 1 a 8 que comprende una zona adaptada para conectar con el medio de manipulación conectado y su brida, alojando medios de fijación desmontables, y particularmente tornillo, tornillo/tuerca.
10. Herramienta (1) según cualquiera de las reivindicaciones 1 a 9 que está inscrita en un paralelepípedo de dimensiones; anchura de 0.15 a 1.5 m; altura de 0.10 m; longitud de 0.15 m, y en particular de anchura 0.15 m.
11. Herramienta (1) según cualquiera de las reivindicaciones1a10que comprende un medio telemático para determinar la distancia a la superficie (20) de la herramienta (1) , particularmente un medio de adquisición de imágenes inalámbrico.
12. Herramienta (1) según cualquiera de las reivindicaciones1a10en donde las piezas de la herramientas son de aluminio y/o nylon.
13. Herramienta (1) según cualquiera de las reivindicaciones 1 a 10 en donde la boquilla de aplicación de la resina está orientada tras el rodillo tractor y en una dirección hacia la superficie (20) contraria al sentido de aplicación de marcha de la herramienta.
14. Método para el recubrimiento automático y remoto mediante tiras de cinta con polímero reforzado con fibra (FRP) , del tipo no impregnado de adhesivo, y un adhesivo epóxico sobre superficies (20) , curvas o planas, de elementos de construcción tales como bóvedas de túneles caracterizado porque comprende:
a) proporcionar una herramienta (1) según una cualquiera de las reivindicaciones 1 a 13 en conexión con un medio de manipulación;
b) desplazar la herramienta (1) sobre la superficie (20) del elemento de construcción;
c) accionar la dispensación de resina del medio de dispensación de resina (8)
d) accionamiento remoto del medio de corte (6) de la herramienta.
15. Método para el recubrimiento automático mediante tiras de cinta con polímero reforzado con fibra (FRP) , según la reivindicación 14 que comprende además
aplicar en una etapa anterior un recubrimiento de la superficie (20) del elementos de construcción mediante una resina epóxica.
16. Método para el recubrimiento automático mediante tiras de cinta con polímero reforzado con fibra (FRP) , según la reivindicación 14 que comprende además
en una etapa anterior limpiar de la superficie (20) del elemento de construcción mediante el medio dispensador de aire comprimido.
Patentes similares o relacionadas:
Disposición de empalme, del 17 de Junio de 2020, de BHS CORRUGATED MASCHINEN- UND ANLAGENBAU GMBH: Disposición de empalme para el empalme de bandas de material, a. con un primer dispositivo dispensador para la dispensación de una primera banda de material […]
Unidad de alimentación para una máquina de conversión de tejidos para convertir una banda de tejido de dos capas, del 13 de Mayo de 2020, de OMET S.R.L.: Unidad de alimentación para alimentar una máquina de conversión de tejidos para convertir una banda de tejido (W1, W2) de dos capas, comprendiendo […]
Máquina de empaquetado por termosellado, del 4 de Marzo de 2020, de CAVANNA S.P.A.: Una máquina de empaquetado por termosellado que comprende: • un bastidor de soporte , • un transportador horizontal configurado […]
Dispositivo y método de empalme, del 1 de Enero de 2020, de TETRA LAVAL HOLDINGS & FINANCE S.A.: Un método para empalmar una banda de material de envasado , que comprende: guiar la banda de material de envasado a través de un dispositivo […]
Conjunto de alimentación de banda de soporte para etiquetar productos que van a ser etiquetados, del 28 de Agosto de 2019, de SACMI VERONA S.P.A: Procedimiento de alimentación de una banda de soporte para etiquetas adhesivas para etiquetar productos que van a ser etiquetados, caracterizado por que […]
Dispositivo y procedimiento para unir bandas con etiquetas autoadhesivas que se suministrarán a una máquina de etiquetado, del 21 de Agosto de 2019, de Kosme S.r.l. Unipersonale: Un dispositivo para unir bandas con etiquetas autoadhesivas que se suministrarán a una máquina de etiquetado, que comprende: una estructura de […]
 Sello de cola con separación de capas reducida, del 26 de Junio de 2019, de GPCP IP Holdings LLC: Método de sellado de cola de un rollo de producto de papel tisú que comprende las etapas de:
a) formar un rollo de producto […]
Sello de cola con separación de capas reducida, del 26 de Junio de 2019, de GPCP IP Holdings LLC: Método de sellado de cola de un rollo de producto de papel tisú que comprende las etapas de:
a) formar un rollo de producto […]
Dispositivo de empalme para materiales en forma de banda, desenrollador que comprende dicho dispositivo de empalme y procedimiento operativo, del 22 de Mayo de 2019, de Guangdong Fosber Intelligent Equipment Co., Ltd: Un dispositivo de empalme para empalmar un borde posterior de un primer material en forma de banda (N1) a un borde anterior de un segundo material en forma de banda (N2), […]