Determinación de la posición y la orientación de un implante dental.
Procedimiento para determinar una posición y una orientación de un implante dental (12),
comprendiendo el procedimiento:
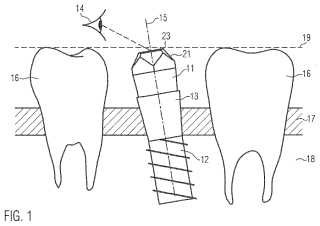
explorar una superficie de un cuerpo de exploración (11) conectado al implante, en el que se determina una pluralidad de puntos de datos (31), correspondiendo los puntos de datos (31) a posiciones de puntos (31) que están situados en la superficie del cuerpo de exploración (11) o cargar, en un dispositivo informático, un conjunto de datos que tiene una pluralidad de puntos de datos (31) que corresponden a posiciones de puntos (31) que están situados en la superficie de un cuerpo de exploración (11) conectado al implante dental (12), comprendiendo el cuerpo de exploración (11) un extremo inferior (22) con medios para conectar el cuerpo de exploración (11) al implante (12) y un extremo superior (23) que tiene una geometría de exploración, en el que la superficie de la geometría de exploración (21) comprende una pluralidad de zonas planas (24) en el que desde cada punto de vista posible (14) existen por lo menos tres zonas planas (24) por lo menos parcialmente visibles;
reconstruir por lo menos tres planos (32) en base a dichos puntos de datos (31);
reconstruir información de intersección de los planos reconstruidos (32), comprendiendo la información de intersección líneas de intersección rectas (33) y/o puntos de intersección (34), y
determinar la posición y la orientación del implante (12) en base a la información intersección reconstruida.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09001983.
Solicitante: STRAUMANN HOLDING AG.
Nacionalidad solicitante: Suiza.
Dirección: PETER MERIAN-WEG 12 4002 BASEL SUIZA.
Inventor/es: HOMANN,FRANK, STRAUB,Benjamin , Lawitschka,Uwe.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61C13/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61C TECNICA DENTAL; APARATOS O METODOS PARA HIGIENE ORAL O DENTAL (cepillos dentales no accionados mecánicamente A46B; preparaciones para la técnica dental A61K 6/00; preparaciones para la limpieza de los dientes o enjuagado de la boca A61K 8/00, A61Q 11/00). › Prótesis dentales; Su fabricación (coronas dentales para recubrir los dientes A61C 5/70; implantes dentales A61C 8/00).
- A61C8/00 A61C […] › Medios destinados a ser fijados en la mandíbula para consolidar los dientes naturales o para fijar prótesis dentales; Implantes dentales; Herramientas para la implantación (fijación de dientes por medio de espigas A61C 13/30).
PDF original: ES-2385214_T3.pdf
Fragmento de la descripción:
Determinación de la posición y la orientación de un implante dental.
La invención se refiere a un procedimiento, que puede ser ejecutado por un dispositivo informático y/o puede ser almacenado en forma de instrucciones ejecutables por un ordenador en un soporte informático, para determinar una posición y una orientación de un implante dental. Además, la invención se refiere a un cuerpo de exploración para determinar una posición y una orientación de un implante dental.
En el campo de los implantes dentales artificiales en los cuales debe reemplazarse un diente o incluso varios dientes, la prótesis dental correspondiente generalmente se fija en la boca del paciente a través de un implante dental que se fija (por ejemplo, como un tornillo) en el hueso de la mandíbula del paciente. Mientras que entre dos dientes adyacentes normalmente hay mucho espacio para la colocación de un implante dental, la situación por ejemplo es más delicada para la prótesis dental correspondiente. Para lograr un resultado cualitativa y estéticamente bueno, por una parte la prótesis dental tiene que encajar casi perfectamente entre dientes adyacentes y por otra parte la conexión entre la prótesis dental y el implante tiene que ser muy firme, lo cual puede conseguirse si la conexión básicamente no tiene holgura. Además de la posición final de una prótesis dental dentro de un entorno oral también es beneficioso garantizar que realmente pueda insertarse una prótesis dental entre dos dientes adyacentes y, al mismo tiempo, pueda conectarse al implante.
Con el fin de lograr las tareas y los requisitos mencionados anteriormente, una posible solución es determinar la posición y la orientación de un implante dental respecto a los dientes y la encía adyacentes entre estos dientes adyacentes con una cierta precisión. Típicamente, esta determinación tiene que realizarse en una situación en la que el implante no sea visible directamente (por ejemplo, que el implante se encuentre por debajo del borde superior de la encía) .
En la técnica anterior, la posición y la orientación de un implante dental se determina acoplando un cuerpo de exploración al implante, determinando la posición y la orientación del cuerpo de exploración (por ejemplo, con un proceso de exploración óptica) , y determinando la posición y la orientación del implante respecto a la posición y la orientación del cuerpo de exploración. En algunos casos, el proceso de exploración se lleva a cabo con la ayuda de un modelo que representa la situación de la boca de un paciente o en otros casos el procedimiento se lleva a cabo directamente en la boca de un paciente. En el estado de la técnica se utilizan varios tipos de cuerpos de exploración con diferentes propiedades geométricas.
Una vez que se conocen las posiciones y las orientaciones de un cuerpo de exploración, esta información se utiliza para obtener la orientación y la posición de dicho implante. Mientras que los implantes dentales y los cuerpos de exploración pueden producirse con una elevada precisión, el proceso de exploración mencionado anteriormente puede ser menos preciso, particularmente en situaciones en las que partes características de un cuerpo de exploración, tales como esquinas o bordes, son visibles sólo parcialmente.
EP-A-1 920 730 describe un cuerpo de exploración para montarse en un implante dental para determinar la posición y la orientación del implante dental. El cuerpo de exploración presenta varias caras laterales orientadas paralelas a su eje longitudinal y una cara superior orientada ortogonalmente al eje longitudinal. Se utiliza información de la posición explorada de puntos de las caras para determinar las caras, que coinciden con las caras de un cuerpo de exploración virtual guardado en un ordenador.
Por lo tanto, un problema a resolver por la presente invención es determinar la posición y la orientación de un implante dental con una alta precisión. Al mismo tiempo, es deseable que el proceso de exploración sea relativamente simple, especialmente en caso de que la exploración se realice directamente en la boca de un paciente donde hay que evitar un proceso de exploración de larga duración.
El problema mencionado anteriormente se soluciona mediante el procedimiento de la reivindicación 1, el medio informático de la reivindicación 10, y el cuerpo de exploración de la reivindicación 11.
En las reivindicaciones dependientes se describen realizaciones preferidas de la presente invención.
El procedimiento para determinar una posición y una orientación de un implante dental en una realización es una combinación de un proceso de exploración y un proceso de reconstrucción. Durante el proceso de exploración, la superficie del cuerpo de exploración que está conectado a un implante es explorada mediante la determinación de una pluralidad de puntos de datos que corresponden a posiciones de puntos que se encuentran situados en la superficie del cuerpo de exploración. En otra realización se carga un conjunto de datos ya existentes, que tienen una pluralidad de puntos de datos que corresponden a posiciones de puntos que se encuentran situados en la superficie del cuerpo de exploración, para llevar a cabo la reconstrucción de una posición y una orientación del implante dental.
Dicho conjunto de datos puede obtenerse mediante un proceso de exploración tal como se ha mencionado anteriormente o a continuación. Durante la fase de reconstrucción, estos puntos de datos se utilizan para reconstruir por lo menos tres planos. A partir de los planos reconstruidos se determina la información de intersección. La información de intersección comprende líneas de intersección rectas donde se cortan por lo menos dos planos y/o puntos de intersección donde se cortan por lo menos tres planos o donde una línea de intersección recta corta un plano o donde se cortan por lo menos dos líneas de intersección rectas. Utilizando la información de intersección reconstruida mencionada anteriormente puede determinarse la posición y la orientación del implante. Esta determinación puede basarse solamente en parte de la información de intersección reconstruida o puede basarse en toda la información de intersección reconstruida disponible lo que permite todavía una mayor precisión ya que la posición y la orientación del implante está sobre restringida. En una realización preferida se reconstruye un punto de intersección directamente a partir de los por lo menos tres planos reconstruidos.
Cabe señalar que los puntos de exploración en la superficie del cuerpo de exploración no tienen que corresponder necesariamente a esquinas o bordes. Puede utilizarse cualquier punto dentro de una zona plana para el procedimiento de reconstrucción mencionado anteriormente lo cual simplifica el proceso de exploración (por ejemplo basta con explorar un número de puntos relativamente moderado) . Preferiblemente, para la reconstrucción de planos solamente se utilizan aquellos puntos que se encuentren completamente dentro de la zona correspondiente (es decir, los puntos, utilizados para la reconstrucción de planos, no se encuentran en las esquinas o los bordes del cuerpo de exploración) . Para la determinación de la posición y la orientación de un implante dental solamente hay que explorar un mínimo de nueve puntos. Típicamente, se exploran más de nueve puntos, por ejemplo, entre veinte y cien puntos, con el fin de asegurar que hay un número suficiente de puntos de buena calidad disponibles para la fase de reconstrucción. En principio no hay límite superior de puntos de exploración. Sin embargo el tiempo para realizar una exploración aumenta al aumentar el número de puntos. Por lo tanto, el número de puntos de exploración debe ser inferior a diez mil o incluso menos de mil.
En una realización preferida, la determinación de la posición y la orientación del implante comprende asociar elementos geométricos reconstruidos a elementos geométricos físicos del cuerpo de exploración. Por ejemplo, pueden asociarse líneas de intersección rectas reconstruidas a los bordes físicos del cuerpo de exploración y/o pueden asociarse puntos de intersección reconstruidos a las esquinas físicas del cuerpo de exploración. Hay que indicar que las esquinas físicas (y también los bordes) no son esquinas perfectas en sentido matemático, sino que son esquinas (o bordes) redondeados con un radio de curvatura que es típicamente menor que 0, 05 mm. Debe entenderse que los objetos geométricos reconstruidos corresponden a objetos físicos geométricos de una parte del cuerpo de exploración... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar una posición y una orientación de un implante dental (12) , comprendiendo el procedimiento:
explorar una superficie de un cuerpo de exploración (11) conectado al implante, en el que se determina una pluralidad de puntos de datos (31) , correspondiendo los puntos de datos (31) a posiciones de puntos (31) que están situados en la superficie del cuerpo de exploración (11) o cargar, en un dispositivo informático, un conjunto de datos que tiene una pluralidad de puntos de datos (31) que corresponden a posiciones de puntos (31) que están situados en la superficie de un cuerpo de exploración (11) conectado al implante dental (12) , comprendiendo el cuerpo de exploración (11) un extremo inferior (22) con medios para conectar el cuerpo de exploración (11) al implante (12) y un extremo superior (23) que tiene una geometría de exploración, en el que la superficie de la geometría de exploración (21) comprende una pluralidad de zonas planas (24) en el que desde cada punto de vista posible (14) existen por lo menos tres zonas planas (24) por lo menos parcialmente visibles;
reconstruir por lo menos tres planos (32) en base a dichos puntos de datos (31) ;
reconstruir información de intersección de los planos reconstruidos (32) , comprendiendo la información de intersección líneas de intersección rectas (33) y/o puntos de intersección (34) , y determinar la posición y la orientación del implante (12) en base a la información intersección reconstruida.
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que la determinación de la posición y la orientación del implante (12) comprende:
asociar líneas de intersección rectas reconstruidas (33) a bordes físicos (26) del cuerpo de exploración (11) ; y/o asociar puntos de intersección reconstruidos (34) a esquinas físicas (25) del cuerpo de exploración (11) .
3. Procedimiento según una de las reivindicaciones 1 ó 2, caracterizado por el hecho de que las posiciones de todos los puntos (31) que se utilizan para la reconstrucción de planos (32) se encuentran situadas dentro de las zonas planas (24) en la superficie del cuerpo de exploración (11) .
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por el hecho de que la reconstrucción de los planos comprende ajustar un plano (32) a través de un subconjunto de los puntos de datos (31) .
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado por el hecho de que el cuerpo de exploración (11) está conectado directamente al implante (12) o en el que el cuerpo de exploración (11) está conectado al implante (12) a través de un adaptador (13) .
6. Procedimiento según una de las reivindicaciones 1 a 5, caracterizado por el hecho de que la determinación de la posición y la orientación del implante (12) se basa, además, en las dimensiones previamente conocidas del cuerpo de exploración (11) y/o el implante y/u otras partes o entre el cuerpo de exploración (11) y el implante (12) , tal como un adaptador (13) .
7. Procedimiento según una de las reivindicaciones 1 a 6, caracterizado por el hecho de que el procedimiento comprende, además:
generar un modelo digital, en base a información determinada durante un proceso de exploración u obtenida a partir del conjunto de datos cargados en el dispositivo informático, en el que el modelo digital es tridimensional, y en el que el modelo digital modela por lo menos parcialmente el implante dentro de la boca de un paciente.
8. Procedimiento según la reivindicación 7, caracterizado por el hecho de que el modelo digital comprende el modelado de dientes adyacentes (16) junto al implante (12) y/o el modelado de la encía (17) junto al implante (12) , si se ha determinado información sobre los dientes adyacentes (16) y la encía (17) durante el proceso de exploración o se ha obtenido a partir del conjunto de datos cargados en el dispositivo informático.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado por el hecho de que la exploración de la superficie del cuerpo de exploración (11) se realiza mientras el cuerpo de exploración (11) está situado dentro de la boca de un paciente o en el que la exploración de la superficie del cuerpo de exploración (11) se realiza mientras el cuerpo de exploración (11) está acoplado a un modelo físico, en el que el modelo físico preferiblemente refleja la situación de parte de la boca de un paciente.
10. Soporte informático que tiene almacenado en el mismo instrucciones ejecutables por un ordenador para realizar los procedimientos de las reivindicaciones 1 a 9.
11. Cuerpo de exploración (11) para determinar una posición y una orientación de un implante dental (12) , comprendiendo el cuerpo de exploración (11) :
un extremo inferior (22) con medios para conectar el cuerpo de exploración (11) al implante (12) , en el que el cuerpo de exploración (11) está conectado directamente al implante (12) o en el que el cuerpo de exploración (11) está conectado al implante (12) a través de un adaptador (13) , y un extremo superior (23) que tiene una geometría de exploración (21) ;
en el que la superficie de la geometría de exploración (21) comprende una pluralidad de zonas planas (24) que comprenden por lo menos tres tipos de zonas planas (24) que tienen diferentes ángulos de orientación respecto al eje longitudinal (15) del cuerpo de exploración (11) conectando el eje longitudinal (15) del cuerpo de exploración (11) el extremo superior (23) y el extremo inferior (22) del cuerpo de exploración (11) , en el que un ángulo de orientación respecto al eje longitudinal (15) de por lo menos un tipo de zona plana (24) está en un intervalo entre 30º y 60º, en el que un tipo de zona plana (24) es paralela al eje longitudinal (15) y en el que el número de esquinas (25) de por lo menos dos tipos de zonas planas (24) es diferente, en el que una zona plana (24) particular de dichos tipos de zonas planas tiene una pluralidad de lados (26) , en el que la longitud de todos los lados de dicha zona plana (24) son iguales o en el que dicha zona plana (24) comprende por lo menos dos o por lo menos tres lados (26) con longitudes diferentes, de manera que desde todos los puntos de vista (14) existen por lo menos tres de dichas zonas planas
(24) por lo menos parcialmente visibles, en el que un posible punto de vista (14) se encuentra situado al mismo nivel
12. Cuerpo de exploración (11) según la reivindicación 11, caracterizado por el hecho de que la geometría de exploración (21) es poliédrica y en el que la geometría de exploración (21) comprende una primera esquina (25) y por lo menos tres esquinas adicionales (25) , en el que por lo menos tres de las esquinas adicionales definen un plano (32) , y en el que la primera esquina (25) se encuentra fuera de dicho plano (32) . 13. Cuerpo de exploración (11) según una de las reivindicaciones 11 ó 12, caracterizado por el hecho de que comprende, además, una codificación (27) que asocia el cuerpo de exploración (11) a un tipo de implante particular (12) y/o a un tipo de adaptador (13) particular. 14. Cuerpo de exploración (11) según la reivindicación 13, caracterizado por el hecho de que la codificación (27) está situada de manera que la codificación (27) es visible desde todos los puntos de vista posibles (14) , donde un posible punto de vista (14) se encuentra situado en el mismo nivel o lateralmente por encima de dicha codificación (27) , en el que un punto de vista (14) se encuentra situado lateralmente por encima de dicha codificación (27) en caso de que la orientación del cuerpo de exploración (11) sea tal que el extremo superior (23) apunte hacia arriba y el extremo inferior (22) apunte hacia abajo y el punto de vista (14) se encuentra situado en cualquier posición más elevada que el extremo más superior (23) del cuerpo de exploración (11) . 15. Cuerpo de exploración (11) según una de las reivindicaciones 13 ó 14, caracterizado por el hecho de que la codificación (27) comprende uno o más nervios y/o canales y/o anillos de colores. 16. Cuerpo de exploración (11) según una de las reivindicaciones 11 a 15, caracterizado por el hecho de que partes de la geometría de exploración (21) son reflectoras de la luz y/o partes de la geometría de exploración (21) son no reflectoras de la luz. o por encima de dicha geometría de exploración (21) , en el que un punto de vista (14) se encuentra situado por encima de dicha geometría de exploración (21) en caso de que la orientación del cuerpo de exploración (11) sea tal que el extremo superior (23) apunte hacia arriba y el extremo inferior (22) apunte hacia abajo y el punto de vista (14) se encuentra situado en cualquier posición más elevada que el extremo más superior (23) del cuerpo de exploración (11) .
Patentes similares o relacionadas:
Implante dental, del 22 de Julio de 2020, de Nordin, Peter: Un implante dental configurado para anclarse en un maxilar para soportar una prótesis dental, que comprende un miembro envolvente que […]
Implante dental poroso, del 15 de Julio de 2020, de Joint Stock Company "altimed": Un implante dental que tiene una zona porosa metálica biológicamente compatible para el contacto con el hueso y un asiento para la prótesis dental, […]
Instrumento quirúrgico de mano, y una herramienta y un dispositivo de protección, del 15 de Julio de 2020, de Zastrow, Frank: Dispositivo quirúrgico dental de mano con una herramienta móvil , en donde se forma una zona de trabajo en un extremo distal de la herramienta y en donde […]
Películas de proteína de múltiples capas, métodos de preparación y dispositivos de suministro de fármacos e implantes biomédicos que emplean las películas, del 15 de Julio de 2020, de AddBIO AB: Un implante biomédico que comprende un sustrato de implante y una película de proteína de múltiples capas en al menos una porción de la superficie del sustrato de implante, […]
Implante modular con una porción porosa sujeta, del 8 de Julio de 2020, de Zimmer Dental Inc: Un sistema de implante dental modular que comprende: una cabeza configurada para soportar una prótesis dental, […]
Sistema de implante dental, del 1 de Julio de 2020, de Sonnleitner, Dietmar: Un sistema de implante dental para la regeneración ósea de un sitio de defecto óseo de una mandíbula que incluye - un implante que se ancla […]
Herramienta de autoinjerto con un perfil acanalado mejorado y procedimientos de uso, del 1 de Julio de 2020, de HUWAIS IP HOLDING LLC: Un osteótomo giratorio , que comprende: una espiga que establece un eje longitudinal de rotación; un cuerpo que se extiende desde dicha espiga […]
La combinación de un modelo físico de una dentadura de un paciente y un análogo de implante alargado, y un método para hacer un modelo físico de una dentadura, del 1 de Julio de 2020, de Elos Medtech Pinol A/S: La combinación de un modelo físico de una dentadura de un paciente y un análogo de implante alargado para su inserción en dicho modelo físico para simular […]