Procedimiento de detección de pulsos láser por medio de una matriz de fotodetectores.
Procedimiento de detección de pulsos láser de periodo de repetición TI predeterminado y de duración dI,
que presentan una fluctuación de amplitud tj, siendo los pulsos emitidos por un emisor y detectados por medio de una matriz de fotodetectores, comprendiendo el procedimiento una etapa de integración de cargas en una duración ti predeterminada y según un periodo Tm superior a un periodo mínimo Tmin, con ti/Tmin< 1 y dI
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/051593.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY-SUR-SEINE FRANCIA.
Inventor/es: PRENAT,Michel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S7/48 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › de sistemas de acuerdo con el grupo G01S 17/00.
- H03K5/26 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03K TECNICA DE IMPULSO (medida de las características de los impulsos G01R; modulación de oscilaciones sinusoidales por impulsos H03C; transmisión de información digital, H04L; circuitos discriminadores de detección de diferencia de fase entre dos señales de conteo o integración de ciclos de oscilación H03D 3/04; control automático, arranque, sincronización o estabilización de generadores de oscilaciones o de impulsos electrónicos donde el tipo de generador es irrelevante o esta sin especificar H03L; codificación, decodificación o conversión de código, en general H03M). › H03K 5/00 Manipulación de impulsos no cubiertos por ninguno de los otros grupos principales de la presente subclase (circuitos de realimentación H03K 3/00, H03K 4/00; utilizando dispositivos magnéticos o eléctricos no lineales H03K 3/45). › siendo la característica la duración, el intervalo, la posición, la frecuencia o la secuencia.
PDF original: ES-2377585_T3.pdf
Fragmento de la descripción:
Procedimiento de detección de pulsos láser por medio de una matriz de fotodetectores.
El campo de la invención es el de la detección de pulsos láser por medio de una matriz de fotodetectores.
Se recuerda que una matriz de fotodetectores realiza una conversión de los fotones en electrones proporcionalmente a la iluminación recibida por cada fotodetector en su banda espectral de sensibilidad, y a continuación una integración de estas cargas en pozos de potencial y una lectura de estas cargas. Un registro de salida genera, después de la amplificación, una señal de salida que contiene las informaciones de luminancia de la matriz para cada uno de sus píxeles. Un ejemplo para un sistema de detección de pulsos láser se describe en el documento EP 0 871 041 A1.
La duración del pulso “dI” del láser de iluminación es del orden de 10 ns y la frecuencia de repetición típicamente está comprendida entre 10 y 20 Hz es decir un periodo comprendido entre 50 y 100 ms. La matriz tiene una duración de integración cercana a un milisegundo que puede variar por ejemplo entre un valor inferior a un milisegundo y varios milisegundos y un periodo entre dos integraciones sucesivas típicamente superior o igual a 10 ms, debiéndose esto al tiempo necesario para realizar la operación de lectura; su “factor de forma” de integración es entonces del orden de 1/10. Las fases de integración deben estar, por lo tanto, sincronizadas con los momentos de llegada de estos pulsos. Se muestra necesario, por lo tanto, asociar a la matriz de detección un dispositivo de sincronización adecuado para activar la integración cuando un pulso llega a la matriz. Convencionalmente este dispositivo de sincronización comprende un sensor de pulsos auxiliar cuyo receptor está constantemente abierto y es lo suficientemente rápido para detectar pulsos cortos y determinar con precisión su momento de llegada. El conocimiento del periodo de repetición de los pulsos permite entonces activar la integración de la matriz para los siguientes pulsos. De este modo, en la técnica anterior, la matriz es “esclava” del sensor de pulsos auxiliar, en el sentido de que depende totalmente de éste para la activación de la integración. Este proceso se ilustra mediante el esquema de la figura 1 en el que se representan, en función del tiempo:
- los pulsos láser emitidos en un periodo TI,
- los pulsos detectados por el sensor auxiliar en el mismo periodo TI y,
- las fases de integración de la matriz activadas por el sensor auxiliar cuando un pulso es detectado para que la integración sea efectiva a partir del siguiente pulso.
Un ejemplo de sistema de detección conocido, adecuado para implementar este proceso, se describe en relación con la figura 2; éste comprende una matriz 3 de fotodetectores acoplada a un sensor auxiliar 6 mediante una unidad de procesamiento 5.
Este sensor de pulsos rápido es, por ejemplo, un detector analógico de elemento único. El sensor 6 está situado generalmente aproximadamente en el foco de un objetivo óptico incluido en una lente 4', cuyo eje pasa por el centro del sensor, de modo que el objetivo óptico forma sobre el sensor una imagen del punto iluminado por los pulsos. El convertidor 31 de la matriz 3 recibe también los fotones focalizados por otra lente 4 y convierte los fotones recibidos en electrones, proporcionalmente a la iluminación recibida por cada fotodetector. Estas cargas son integradas a continuación por un integrador 32 y a continuación son leídas y amplificadas por un lector-amplificador 33 que genera una señal de salida que contiene las informaciones de luminancia de la matriz. El sensor 6 está acoplado a una unidad de procesamiento 5 que, entre otras tareas, controla la matriz de detección 3 y, particularmente, la fase de integración. Más exactamente, el sensor 6 transmite los momentos de llegada de los pulsos detectados en elprocesador 53 de la unidad 5. Éste calcula los momentos de activación de la integración y los transmite a ungenerador 51 de órdenes de inicio de la integración. Éste envía las órdenes de activación al integrador 32 de la matriz 3.
El principio descrito anteriormente presenta un doble inconveniente:
- la complejidad y el coste, ya que son necesarios dos sensores para asegurar la función de detección,
- el rendimiento: en efecto, la matriz de detección es más sensible que el detector de elemento único de
sincronización, ya que este elemento único tiene un campo muy grande, lo que hace al sistema no homogéneo y de rendimiento limitado por el sensor auxiliar.
La invención permite suprimir estos dos inconvenientes.
Más exactamente, la invención tiene por objeto un procedimiento de detección de pulsos láser de periodo de repetición TI predeterminado y de duración dI, que presenta una fluctuación de amplitud tj, siendo los pulsos emitidos por un emisor y detectados por medio de una matriz de fotodetectores, comprendiendo el procedimiento una etapa de integración de cargas en una duración ti predeterminada y según un periodo Tm superior a un periodomínimo Tmin, con ti/Tmin < 1 y dI<ti. Ésta se caracteriza principalmente por que la etapa de integración comprende una primera sub-etapa durante la cual Tm es el submúltiplo más pequeño de TI+ti-tj superior a Tmin hasta la detección de un primer pulso, una segunda sub-etapa con Tm igual a TI' durante la detección de los siguientes pulsos llamada fase de seguimiento, con TI' = TI x (1 -VRc/c) , donde VRc es la velocidad de acercamiento entre el emisor de los pulsos y la matriz, c la velocidad de la luz en el aire.
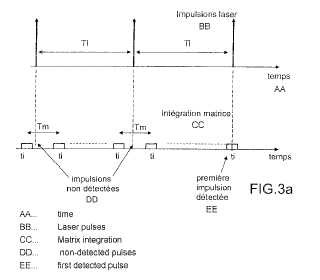
La detección de pulsos láser funciona de la siguiente forma secuencial 1: detección en el plano temporal de una señal que presenta las características temporales del código láser esperado, utilizando la matriz asociada a la unidad de procesamiento, sin recurrir a un sensor auxiliar; durante esta fase se utiliza un periodo de integración Tm específico.
2: confirmación de la detección de este primer pulso y detección de los pulsos láser siguientes. Se utiliza durante esta fase un periodo de integración TI'; éste es diferente del periodo TI de los pulsos emitidos por el láser debido a la velocidad de acercamiento entre el emisor de los pulsos y la matriz.
Este procedimiento permite asegurar la detección de los pulsos láser sin recurrir a un sensor auxiliar. La matriz se convierte en un detector de pulsos autónomo.
La invención también tiene por objeto un procedimiento de localización de un blanco iluminado por pulsos láser de periodo de repetición TI predeterminado y de duración dI, siendo detectados los pulsos retro-reflejados por el blanco por medio de una matriz de fotodetectores, que comprende una etapa de integración de cargas según un periodo de integración Tm superior a un periodo mínimo Tmin y en una duración de integración ti predeterminada con ti/Tmin < 1 y dI<ti, caracterizado por que la etapa de integración comprende una primera sub-etapa durante la cual Tm es el submúltiplo más pequeño de TI+ti-tj superior a Tmin hasta la detección del primer pulso, una segunda sub-etapa con Tm igual a TI' durante la detección de los siguientes pulsos llamada fase de seguimiento, con TI' = TI x (1 -VRc/c) , donde VRc es la velocidad de acercamiento entre el blanco y la matriz, c la velocidad de la luz en el aire.
Según una característica de la invención, siendo ti la duración de integración durante la primera sub-etapa, y estando la velocidad VRc determinada con un error, la duración de integración durante la segunda sub-etapa es igual a ti+28t, con 8t = tj + (EVR/c) x TR + dI, donde EVR es un mayorante del valor absoluto del error en la velocidad VRc, y TR es un mayorante de la duración de la fase de seguimiento. En el caso de la alternativa que consiste en tomar TI'=TI, se tomará 8t = tj + (VRmax /c) x TR + dI, donde VRmax es un mayorante del valor absoluto de la velocidad VRc y TR es un mayorante de la duración de la fase de seguimiento.
Según una característica de la invención, tj y/o VRc/c y/o 8t son despreciables.
Eventualmente comprende además integraciones suplementarias intercaladas entre dichas integraciones, siendo el intervalo de tiempo entre dos integraciones superior o igual a Tmin. Este permite particularmente detectar falsas alarmas debidas, por ejemplo, a un reflejo solar.
Al proporcionar la matriz de fotodetectores una señal de salida, la detección de un pulso comprende una etapa de comparación de dicha señal de salida con... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de detección de pulsos láser de periodo de repetición TI predeterminado y de duración dI, que presentan una fluctuación de amplitud tj, siendo los pulsos emitidos por un emisor y detectados por medio de una matriz de fotodetectores, comprendiendo el procedimiento una etapa de integración de cargas en una duración ti predeterminada y según un periodo Tm superior a un periodo mínimo Tmin, con ti/Tmin < 1 y dI<ti, caracterizado porque la etapa de integración comprende una primera sub-etapa durante la cual Tm es el submúltiplo más pequeño de TI+ti-tj superior a Tmin hasta la detección de un primer pulso, una segunda sub-etapa con Tm igual a TI' durante la detección de los siguientes pulsos llamada fase de seguimiento, con TI' = TI x (1 -VRc/c) , donde VRc es la velocidad de acercamiento entre el emisor de los pulsos y la matriz, c la velocidad de la luz en el aire.
2. Procedimiento de localización de un blanco iluminado por pulsos láser de periodo de repetición TI predeterminado y de duración dI, que presentan una fluctuación de amplitud tj, siendo los pulsos retro-reflejados por el blanco detectados por medio de una matriz de fotodetectores, que comprende una etapa de integración de cargas según un periodo de integración Tm superior a un periodo mínimo Tmin y en una duración de integración ti predeterminada con ti/Tmin < 1 y dI<ti, caracterizado porque la etapa de integración comprende una primera sub-etapa durante la cual Tm es el submúltiplo más pequeño de TI+ti-tj superior a Tmin hasta la detección del primer pulso, una segunda sub-etapa con Tm igual a TI' durante la detección de los siguientes pulsos llamada fase de seguimiento, con TI' = TI x (1 -VRc/c) , donde VRc es la velocidad de acercamiento entre el blanco y la matriz, c la velocidad de la luz en el aire.
3. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque VRc/c es despreciable.
4. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque siendo ti la duración de integración durante la primera sub-etapa, y estando la velocidad VRc determinada con un error, la duración de integración durante la segunda sub-etapa es igual a ti+28t, con 8t = tj + (EVR /c) x TR + dI , donde EVR es un mayorante del valor absoluto del error en la velocidad VRc, y TR es un mayorante de la duración de la fase de seguimiento.
5. Procedimiento según la reivindicación anterior, caracterizado porque siendo ti la duración de integración durante la primera sub-etapa, la duración de integración durante la segunda sub-etapa es igual a ti+28t, con 8t = tj + (VRmax /c) x TR + dI, donde VRmax es un mayorante del valor absoluto de la velocidad VRc y TR es un mayorante de la duración de la fase de seguimiento.
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque tj es despreciable.
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que 8t es despreciable.
8. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque comprende además integraciones suplementarias intercaladas entre dichas integraciones, siendo el intervalo de tiempo entre dos integraciones superior o igual a Tmin.
9. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque, proporcionando la matriz de fotodetectores una señal de salida, la detección de un pulso comprende una etapa de comparación de dicha señal de salida con un umbral predeterminado.
10. Procedimiento de designación de un blanco iluminado por pulsos láser de periodo TI que comprende una etapa de localización de los pulsos retro-reflejados por el blanco por medio de una matriz de fotodetectores, según una de las reivindicaciones 2 a 9 y una etapa de seguimiento del blanco a partir de una radiación no pulsada de dicho blanco.
11. Sistema de detección de pulsos láser que comprende una matriz (3) de fotodetectores que comprende un dispositivo (32) de integración de cargas y una unidad de procesamiento (5) acoplada a la matriz, caracterizado porque la unidad de procesamiento comprende medios de implementación del procedimiento de detección según la reivindicación 1 en solitario o en combinación con una de las reivindicaciones 3 a 9.
12. Sistema de localización de un blanco que comprende una matriz (3) de fotodetectores que comprende un dispositivo (32) de integración de cargas y una unidad de procesamiento (5) acoplada a la matriz, caracterizado porque la unidad de procesamiento comprende medios de implementación del procedimiento de localización según una de las reivindicaciones 2 a 9.
Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Método de reconstrucción de imágenes basado en modelo, del 6 de Mayo de 2020, de ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL): Un método de reconstrucción de imágenes de ondas de pulso que comprende: • transmitir un conjunto de ondas de pulso a un objeto […]
Sistema y método de alerta de amenaza de láser, del 4 de Marzo de 2020, de ELBIT SYSTEMS LTD.: Un sistema de alerta de amenaza de láser, configurado para detectar la presencia de una radiación de láser transmitida por una fuente […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Sensor para detectar y localizar fuentes de radiación láser, del 17 de Julio de 2019, de HENSOLDT Sensors GmbH: Sensor para detectar y localizar fuentes de radiación láser con - un detector sensible a la radiación dispuesto en el campo de la imagen de una óptica […]
Aparato y método para determinar elementos de referencia de un entorno, del 12 de Junio de 2019, de BALYO: Un método para determinar elementos de referencia de un entorno para asociar un mapa predeterminado con un mapa del entorno en tiempo real, comprendiendo el método […]
Procedimiento para la detección de radiación láser pulsada, así como avisador de láser productor de imágenes, del 15 de Mayo de 2019, de HENSOLDT Sensors GmbH: Procedimiento para la detección de radiación láser pulsada con resolución bidimensional de la dirección de incidencia, caracterizado […]
Conjunto de sensores ópticos, del 11 de Marzo de 2019, de HENSOLDT Sensors GmbH: Conjunto de sensores ópticos que comprende varios sensores (D1, D2) para la detección de ondas electromagnéticas y una abertura común asignada a los sensores (D1, D2), previéndose […]