Aparato para la distribución autónoma de alimentos y bebidas.
Dispositivo robótico móvil autónomo, que comprende una base móvil,
que es capaz de desplazarse, utilizando su propio mecanismo de movimiento y que comprende una máquina para la preparación de café autónoma integrada que sirve automáticamente bebidas o comestibles líquidos, sin influencia externa, excepto el proceso de petición.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07001146.
Solicitante: NESTEC S.A..
Nacionalidad solicitante: Suiza.
Dirección: AVENUE NESTLE 55 1800 VEVEY SUIZA.
Inventor/es: JARISCH, CHRISTIAN, SCORRANO, LUCIO, Tomatis,Nicola.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47J31/40 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47J MATERIAL DE COCINA; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; APARATOS PARA PREPARAR LAS BEBIDAS. › A47J 31/00 Aparatos para preparar las bebidas (máquinas o instrumentos de menaje para colar los productos alimenticios A47J 19/00; preparación de bebidas no alcohólicas, p. ej. por adición de ingredientes a los jugos de frutas o de legumbres, A23L 2/00; teteras o cafeteras A47G 19/14; infusores de té A47G 19/16; fabricación de cerveza C12C; preparación de vino o de otras bebidas alcohólicas C12G). › Aparatos para preparar brebajes con medios de distribución capaces de añadir una cantidad medida de ingredientes, p. ej. de café, agua, azúcar, cacao, leche, té.
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
PDF original: ES-2380807_T3.pdf
Fragmento de la descripción:
Aparato para la distribución autónoma de alimentos y bebidas El ámbito de la presente invención es la producción de bebidas o comestibles líquidos, en base a un líquido tal como por ejemplo, agua o leche e ingredientes.
Por lo tanto, es objetivo de la presente invención dar a conocer una tecnología que ofrece la producción de dichos productos de forma atractiva.
La presente invención da a conocer una máquina móvil autónoma para la preparación de café y, preferentemente completamente protegida, con uno o varios interfaces de usuario.
Se da a conocer estado de la técnica útil para comprender la invención en los documentos EP 0 470 513 A2 y US 15 2006/0037969 A.
El objetivo es conseguido por medio de las características de las reivindicaciones independientes. Las reivindicaciones dependientes desarrollan adicionalmente la idea central de la invención.
La invención da a conocer un dispositivo robótico móvil autónomo que comprende una máquina integrada para la producción de bebidas o comestibles líquidos en estado líquido.
El dispositivo puede comprender un controlador para la máquina de producción, estando conectado el controlador a un interfaz inalámbrico, diseñado para recibir señales transmitidas de forma inalámbrica, capaces de poner en 25 marcha la máquina de producción.
El dispositivo puede comprender un controlador para la máquina de producción, estando conectado el controlador a un interfaz de usuario accionado manualmente para disponer el funcionamiento de la máquina de producción.
El interfaz de usuario puede ser desconectado del robot a efectos de introducir parámetros externos.
El dispositivo puede ser dotado de un sistema de navegación autónomo, diseñado para desplazar el robot basado en señales de salida, por ejemplo, sensores visuales del robot.
La máquina de producción puede ser de tipo autocontenido.
El dispositivo puede comprender un suministro independiente de potencia eléctrica.
La máquina de producción puede ser diseñada para la producción de bebidas o comestibles líquidos, basados en 40 ingredientes previamente dosificados.
El dispositivo puede tener un contenedor para el almacenamiento de porciones de ingredientes previamente dosificados.
45 El dispositivo puede comprender un sistema automático para facilitar tazas y bandejas.
El dispositivo puede comprender un elevador de almacenamiento de tazas, un dispositivo de sujeción de las tazas (manipulador de las tazas) , y un elevador de almacenamiento de bandejas, capaz de almacenar varias bandejas, mientras que una taza puede ser transferida desde el elevador de almacenamiento de tazas a la bandeja superior, 50 a efectos de desplazar la taza, situándola debajo de la salida de café para la preparación de café.
La invención da a conocer también un interfaz de usuario basado en la web en combinación con dicho dispositivo, estando diseñado para la selección de una mezcla de café, un lugar de servicio y una hora/fecha de servicio, utilizando una presentación gráfica.
55 La invención da a conocer también un interfaz interno en combinación con dicho dispositivo, diseñado para pedir un café directamente en el robot, utilizando una presentación gráfica.
Otros objetivos, características y ventajas de la invención quedarán evidentes con la siguiente descripción 60 detallada de realizaciones de la misma, en relación con las figuras de los dibujos adjuntos.
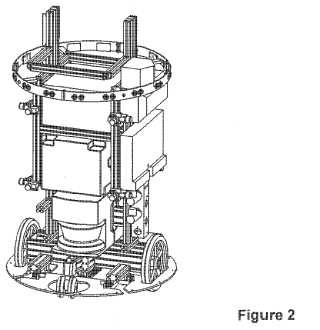
La figura 1 muestra un entorno de aplicación de la presente invención, La figura 2 muestra la base móvil del robot con PC integrado, sensores, baterías y medios de impulsión, 65
La figura 3 muestra la botella de gas para la generación de presión en la bomba peristáltica, impulsando el agua caliente hacia fuera de los termos, pasando a través de un medidor de caudal y hacia dentro de la unidad de preparación motorizada, La figura 4 muestra el sistema de salida del café, La figura 5 muestra el sistema de almacenamiento de cápsulas, La figura 6 muestra el sistema de manipulación y suministro de cápsulas, Las figuras 7 y 8 muestran detalles del sistema de manipulación y suministro de cápsulas, La figura 9 muestra la operación de elevación de la cápsula, Las figuras 10 a 13 muestran el sistema de bandeja de las tazas, con elevador de la bandeja, La figura 14 muestra el funcionamiento del elevador de la bandeja, La figura 15 muestra un dispositivo de sujeción de la taza, La figura 16 muestra el dispositivo robótico, en su conjunto, La figura 17 muestra el orden lógico, La figura 18 muestra un interfaz de usuario desacoplable (PC de bolsillo, PDA, asistente digital personal, etc, La figura 19 muestra el interfaz de usuario desmontable en estado conectado al robot, La figura 20 muestra una vista general del sistema de navegación.
El dispositivo, según la presente invención es, en primer lugar, un robot que tiene el aspecto general mostrado en la figura 16. Puede comprender dos partes principales: la base móvil completamente autónoma mostrada en la figura 2, y una máquina para la preparación de bebidas (por ejemplo, preparación de café) autocontenida y automática, es decir, el robot lleva sus propios recursos, tales como suministro eléctrico, ingredientes, líquido, y potencia de cálculo.
Mientras que los vehículos guiados de forma autónoma (AGV) utilizan, habitualmente, para su navegación, modificaciones onerosas y poco flexibles del entorno, tales como guías de suelo o reflectores, como referencias, los sistemas de localización actuales están preparados para entornos no modificados, es decir, características naturales. En realidad, el dispositivo según la invención, puede estar equipado, por ejemplo, con sensores visuales (cámaras, etc.) a efectos reconocer el entorno basándose en un reconocimiento de modelo de las señales emitidas por los sensores. El entorno del robot puede ser programado previamente y almacenado en una memoria del PC incorporado. El dispositivo, de acuerdo con la invención, puede actuar, por lo tanto, en un escenario de aplicación, tal como se ha mostrado en la figura 1.
La siguiente descripción está dividida en cuatro partes:
1. Robot y su sistema de navegación (base móvil del robot)
2. Máquina de preparación de café que funciona de forma autónoma, con respecto al suministro eléctrico (es decir, sin cables de suministro)
3. Sistema de manipulación y suministro de tazas
4. Interfaces de usuario
1. Robot (base móvil)
La base móvil mostrada en la figura 2 puede ser un sistema de impulsión diferencial que utiliza, por ejemplo, la tecnología de navegación autónoma Bluebotics (ANT®) (ver, www.bluebotics.com para más detalles) , que es un ejemplo de sistema de navegación autónomo.
La tecnología ANT será explicada con referencia a la figura 20. La navegación es presentada en tres partes: Mapa; Planificación y Movimiento; y Localización.
El mapa del entorno es una estructura tipo gráfico con nodos, puntos de interés que el robot tiene que alcanzar para llevar a cabo una cierta tarea. Este gráfico es utilizado, por lo tanto, para la planificación de la trayectoria. Además, contiene la información con respecto a todas las características del entorno. Esto permite calcular qué característica es visible, desde la posición actual del robot, y utilizarla para la localización.
Planificación y Movimiento de la Trayectoria La tecnología ANT® implementa tres algoritmos de planificación de trayectoria. Funcionan en diferentes niveles de abstracción y tienen en cuenta las lecturas de sensor en diferentes grados. La capa más elevada es el planificador global basado en gráfico. Se basa en la estructura de gráfico antes mencionada, en la que los nodos son localizaciones de interés y los bordes indican transversalidad entre localizaciones. El planificador utiliza una búsqueda inicial de profundidad que genera una trayectoria óptima en cuanto a longitud. Dado que la trayectoria es global y que no se tienen en cuenta lecturas de sensor, no se puede tratar en este nivel una modificación dinámica de la trayectoria. La segunda capa de planificación de trayectoria utiliza una función de navegación en una red local alrededor del robot. De esta manera, puede tener en cuenta las lecturas actuales de sensor, y no está limitada a los nodos del mapa a priori. No obstante, las trayectorias... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo robótico móvil autónomo, que comprende una base móvil, que es capaz de desplazarse, utilizando su propio mecanismo de movimiento y que comprende una máquina para la preparación de café autónoma integrada 5 que sirve automáticamente bebidas o comestibles líquidos, sin influencia externa, excepto el proceso de petición.
2. Dispositivo, según la reivindicación 1, que comprende, además, un controlador para la máquina de servicio, estando conectado el controlador a un interfaz inalámbrico, diseñado para recibir señales transmitidas de forma inalámbrica, capaces de disponer el funcionamiento de la máquina de servicio.
3. Dispositivo, según la reivindicación 1, que comprende, además, un controlador para la máquina de servicio, cuyo controlador está conectado a un interfaz de usuario accionado manualmente para ajustar el funcionamiento de la máquina de servicio.
4. Dispositivo, según la reivindicación 3, en el que el interfaz de usuario puede ser desconectado del dispositivo robótico para introducir parámetros desde el exterior ("offboard") .
5. Dispositivo, según cualquiera de las reivindicaciones anteriores, que comprende un sistema de navegación autónomo diseñado para navegar el dispositivo robótico basado en señales de salida, por ejemplo, de sensores 20 visuales del dispositivo robótico.
6. Dispositivo, según cualquiera de las reivindicaciones anteriores, en el que la máquina de servicio es autónoma.
7. Dispositivo, según cualquiera de las reivindicaciones anteriores, que comprende un suministro de energía 25 eléctrica independiente.
8. Dispositivo, según cualquiera de las reivindicaciones anteriores, en el que la máquina de servicio produce una bebida o líquido comestible, basándose en ingredientes previamente dosificados.
9. Dispositivo, según la reivindicación 8, en el que el dispositivo tiene un contenedor para un almacenamiento de dosificaciones de ingredientes previamente dosificados.
10. Dispositivo, según cualquiera de las reivindicaciones anteriores, que comprende un sistema automático de manipulación de tazas y bandejas. 35
11. Dispositivo, según la reivindicación 10, que comprende un elevador de almacenamiento de tazas, un dispositivo de sujeción de tazas y un dispositivo elevador de almacenamiento de bandejas, capaz de almacenar varias bandejas (9) , mientras que una taza (11) puede ser transferida desde el elevador de almacenamiento de tazas a la bandeja superior, a efectos de desplazar la taza debajo de la salida de café (7) para la preparación del café.
12. Un interfaz de usuario basado en la web, en combinación con el dispositivo, según cualquiera de las reivindicaciones 1 a 10, que comprende la posibilidad de seleccionar una mezcla de café, un lugar de servicio y una hora/fecha de servicio, utilizando presentación gráfica.
45 13. Interfaz interno ("onboard") en combinación con un dispositivo, según la reivindicación 1, que permite la petición de un café directamente en el dispositivo robótico, utilizando presentación gráfica.
Patentes similares o relacionadas:
Sistema para preparar consumiciones de bebida, del 24 de Junio de 2020, de Koninklijke Douwe Egberts B.V: El sistema para preparar consumiciones de bebida, que comprende: un dispositivo de preparación de bebidas, y al menos un envase de suministro intercambiable […]
Conducto de enfriamiento para máquina de bebidas, del 10 de Junio de 2020, de Bedford Systems LLC: Una máquina de elaboración de bebidas que tiene un suministro de líquido precursor para proporcionar un líquido precursor utilizado para formar una bebida, incluyendo el […]
MÁQUINA EXPENDEDORA DE JUGOS DE FRUTA NATURAL PREPARADOS EN EL MOMENTO, del 4 de Junio de 2020, de GUTIÉRREZ SÁNCHEZ, Eduardo Rodrigo: La presente invención se refiere a una máquina expendedora de jugos preparados de fruta natural que comprende una estructura o armazón, un módulo de almacenamiento y […]
Dispensador de bebida caliente y fría, del 8 de Abril de 2020, de PEPSICO, INC.: Un aparato que comprende: una pluralidad de válvulas de agua caliente configuradas para controlar el suministro de agua caliente desde un tanque del calentador […]
DISPOSITIVO DE CÁPSULAS PARA LA ELABORACIÓN DE ZUMOS, del 12 de Marzo de 2020, de QUICKJUICE, S.L: La invención se refiere a una carcasa dotada de una zona de preparación de zumo, y otra para la dispensación,con elementos como un grifo, un alojamiento para vasos,una […]
Dispositivo para dosificación múltiple y cargador, del 11 de Marzo de 2020, de EKBERG EMBALLAGE AB: Un cargador de un dispositivo de dosificación múltiple para liberar una o varias dosis de un aditivo, caracterizado por que tiene un número de aberturas pasantes […]
Máquina de café para suministro de infusión de café con contenido reducido de cafeína, del 4 de Marzo de 2020, de KONINKLIJKE PHILIPS N.V: Máquina de café configurada para suministrar una infusión de café con contenido reducido de cafeína que comprende - un mezclador configurado para realizar […]
Mesa digital, del 19 de Febrero de 2020, de PEPSICO, INC.: Un sistema de dispensación para llenar el fondo de un recipiente con una bebida, el sistema de dispensación comprende: - un controlador […]