Aparato de determinación de velocidad.
Aparato de determinación de velocidad para determinar una velocidad relativa entre un primer objeto (12),
al que puede acoplarse el aparato de determinación de velocidad, y un segundo objeto (1), en el que el aparato (2) de determinación de velocidad comprende:
- un láser (3) que tiene una cavidad (4) de láser para emitir una primera radiación (5) para reflejarse por el segundo objeto (1) para generar una radiación (6) reflejada que es una segunda radiación (6), en el que la primera radiación (5) y al menos una parte de la segunda radiación (6) interfieren dentro de la cavidad (4) de láser,
- un detector (7) de señal de interferencia para detectar una señal de interferencia, que depende de la interferencia dentro de la cavidad (4) de láser,
- una unidad (8) de determinación de velocidad para determinar la velocidad relativa basándose en la señal de interferencia,
- una unidad (9) de determinación de valor de fiabilidad para determinar un valor de fiabilidad para indicar la fiabilidad de la velocidad relativa determinada, en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar el valor de fiabilidad basándose en al menos uno del grupo que consiste en la señal de interferencia detectada, la velocidad relativa determinada y una característica del láser,
caracterizado porque el primer objeto (12) es un vehículo y en el que el aparato (2) de determinación de velocidad comprende además un sistema (10) de seguridad de vehículo para controlar una unidad (20) de seguridad del vehículo (12) dependiendo de la velocidad relativa determinada y el valor de fiabilidad determinado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2009/053887.
Solicitante: KONINKLIJKE PHILIPS ELECTRONICS N.V..
Nacionalidad solicitante: Países Bajos.
Dirección: GROENEWOUDSEWEG 1 5621 BA EINDHOVEN PAISES BAJOS.
Inventor/es: MOENCH,Holger, CARPAIJ,MARK, VAN DER LEE,ALEXANDER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T7/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 7/00 Organos de iniciación de la acción de los frenos. › desencadenados por el contacto del vehículo, p. ej. del parachoques, con un obstáculo exterior, p. ej. otro vehículo.
- G01P3/36 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › Dispositivos caracterizados por el empleo de medios ópticos, p. ej. utilizando la luz infrarroja, visible o ultravioleta (G01P 3/68 tiene prioridad).
- G01S17/58 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de determinación de la velocidad o la trayectoria; Sistemas de determinación del sentido del movimiento.
- G01S17/93 G01S 17/00 […] › como anti-colisión.
PDF original: ES-2388572_T3.pdf
Fragmento de la descripción:
Aparato de determinación de velocidad.
Campo de la invención
La presente invención se refiere a un aparato de determinación de velocidad, un método de determinación de velocidad y un programa informático para determinar una velocidad relativa entre un primer objeto, al que puede acoplarse el aparato de determinación de velocidad, y un segundo objeto. La invención se refiere además a un vehículo que comprende el aparato de determinación de velocidad.
Antecedentes de la invención
El artículo “A Double-Laser Diode Onboard Sensor for Velocity Measurements”, X. Raoul, T. Bosch, G. Plantier y N. Servagent, IEEE Transactions on Instrumentation and Measurement, Vol. 53, febrero de 2007, da a conocer un sensor de interferencia por automezclado (SMI) en un coche para una medición de velocidad en tiempo real. Sin embargo, esta velocidad medida generalmente no puede usarse en un programa electrónico de estabilidad (ESP) o en otro sistema de seguridad de coche, porque no se garantiza que la velocidad medida sea fiable y no desencadena una acción en relación con la seguridad.
El documento US 6.233.045 B1 da a conocer un sensor por automezclado que puede usarse para medir de manera remota la velocidad, las vibraciones, el intervalo, y la longitud.
Sumario de la invención
Es un objeto de la presente invención proporcionar un aparato de determinación de velocidad, un método de determinación de velocidad y un programa informático, que permitan usar la velocidad determinada en un sistema de seguridad de objeto como en un ESP o como en otro sistema de seguridad de vehículo. Es un objeto adicional de la presente invención proporcionar un vehículo que comprende el aparato de determinación de velocidad.
En un primer aspecto de la presente invención se presenta un aparato de determinación de velocidad para determinar una velocidad relativa entre un primer objeto, al que puede acoplarse el aparato de determinación de velocidad, y un segundo objeto, en el que el aparato de determinación de velocidad comprende:
- un láser que tiene una cavidad de láser para emitir una primera radiación para reflejarse por el segundo objeto para generar una radiación reflejada que es una segunda radiación, en el que la primera radiación y al menos una parte de la segunda radiación interfieren dentro de la cavidad de láser,
- un detector de señal de interferencia para detectar una señal de interferencia, que depende de la interferencia dentro de la cavidad de láser,
- una unidad de determinación de velocidad para determinar la velocidad relativa basándose en la señal de interferencia,
- una unidad de determinación de valor de fiabilidad para determinar un valor de fiabilidad para indicar la fiabilidad de la velocidad relativa determinada, en el que la unidad de determinación de valor de fiabilidad está adaptada para determinar el valor de fiabilidad basándose en al menos uno del grupo que consiste en la señal de interferencia detectada, la velocidad relativa determinada y una característica del láser, en el que el primer objeto es un vehículo y en el que el aparato de determinación de velocidad comprende además un sistema de seguridad de vehículo para controlar una unidad de seguridad del vehículo dependiendo de la velocidad relativa determinada y el valor de fiabilidad determinado.
Puesto que la unidad de determinación de valor de fiabilidad determina un valor de fiabilidad, que indica la fiabilidad de la velocidad determinada, este valor de fiabilidad puede usarse para determinar si la velocidad determinada puede usarse en un sistema de seguridad de objeto o no. Por tanto, el valor de fiabilidad determinado puede usarse para usar la velocidad determinada sólo si el valor de fiabilidad indica que la velocidad determinada es fiable, garantizando de este modo que la velocidad determinada se usa sólo si la velocidad determinada es fiable y no desencadena una acción en relación con la seguridad. Esto permite usar la velocidad determinada en un sistema de seguridad de objeto como en un ESP o como en otro sistema de seguridad de vehículo.
El láser que tiene una cavidad de láser, el detector de señal de interferencia y la unidad de determinación de velocidad forman un sensor SMI, que se usa para determinar la velocidad relativa entre el primer objeto y el segundo objeto. El primer objeto es preferiblemente un vehículo, al que puede acoplarse el aparato de determinación de velocidad, en particular, al que se acopla el aparato de determinación de velocidad, y el segundo objeto es, por ejemplo, otro vehículo o un objeto, que no está en movimiento como la superficie bajo el vehículo, es decir, por ejemplo, una superficie de carretera. Si el segundo objeto es un objeto, que no está en movimiento, la velocidad relativa determinada por el aparato de determinación de velocidad es la velocidad absoluta del primer objeto.
La primera radiación es preferiblemente un primer haz de luz emitido por el láser. La segunda radiación es
preferiblemente radiación, que se refleja, en particular, retrodispersada por el segundo objeto, en la que al menos una parte de la segunda radiación entra en la cavidad de láser e interfiere con la primera radiación presente dentro de la cavidad de láser.
La intensidad de la luz de láser en la cavidad se modifica por la interferencia de la primera radiación con la segunda radiación, que es preferiblemente luz retrodispersada y que está desplazada en frecuencia por un desplazamiento Doppler resultante del movimiento relativo de los dos objetos. La señal de interferencia depende preferiblemente de la intensidad de la luz de láser dentro de la cavidad de láser, que se modifica por esta interferencia. El detector de señal de interferencia es preferiblemente un detector de intensidad de luz para medir la intensidad de la luz de láser dentro de la cavidad de láser, al que se dirige al menos una parte de la luz de láser dentro de la cavidad de láser, en el que la señal de interferencia depende de o es la intensidad medida de la luz de láser, que se modifica por la interferencia dentro de la cavidad de láser. El detector de señal de interferencia se ubica preferiblemente fuera de la cavidad de láser.
La unidad de determinación de velocidad está adaptada preferiblemente para determinar la frecuencia fundamental de la señal de interferencia, por ejemplo, transformando por Fourier la señal de interferencia detectada. La unidad de determinación de velocidad está adaptada preferiblemente además para determinar la velocidad relativa dependiendo de la frecuencia fundamental determinada usando la siguiente ecuación:
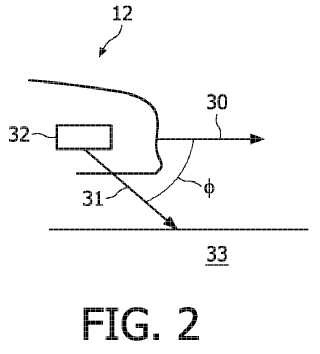
donde f es la frecuencia fundamental, es la longitud de onda de la luz de láser, y es el ángulo entre la dirección de la primera radiación, en particular, la dirección del primer haz de luz, y el vector velocidad, que es preferiblemente paralelo a una superficie bajo un vehículo y apunta en la dirección de la dirección de conducción del vehículo, si el primer objeto es un vehículo y el segundo objeto es la superficie bajo el vehículo.
Se prefiere que la unidad de determinación de valor de fiabilidad esté adaptada para determinar el valor de fiabilidad basándose en la razón señal a ruido de la señal de interferencia. En una realización, la unidad de determinación de valor de fiabilidad está adaptada para determinar un valor de fiabilidad, que indica que la velocidad relativa determinada no es fiable, si la razón señal a ruido es inferior a un valor umbral de señal a ruido predeterminado. Puesto que la velocidad determinada es más fiable si la razón señal a ruido es superior, un valor de fiabilidad fiable puede determinarse basándose en la razón señal a ruido de la señal de interferencia.
En una realización preferida, el aparato de determinación de velocidad está adaptado para aplicar una transformación de Fourier a la señal de interferencia, en el que la unidad de determinación de valor de fiabilidad está adaptada para determinar la razón señal a ruido determinando la altura del pico de la frecuencia fundamental de la señal de interferencia transformada por Fourier, determinando el nivel de ruido de la señal de interferencia transformada por Fourier y dividiendo la altura determinada por el nivel de ruido determinado. Preferiblemente, una función de ajuste de ruido se ajusta a la señal de interferencia transformada por Fourier... [Seguir leyendo]
Reivindicaciones:
1. Aparato de determinación de velocidad para determinar una velocidad relativa entre un primer objeto (12) , al que puede acoplarse el aparato de determinación de velocidad, y un segundo objeto (1) , en el que el aparato (2) de determinación de velocidad comprende:
- un láser (3) que tiene una cavidad (4) de láser para emitir una primera radiación (5) para reflejarse por el segundo objeto (1) para generar una radiación (6) reflejada que es una segunda radiación (6) , en el que la primera radiación (5) y al menos una parte de la segunda radiación (6) interfieren dentro de la cavidad (4) de láser,
- un detector (7) de señal de interferencia para detectar una señal de interferencia, que depende de la interferencia dentro de la cavidad (4) de láser,
- una unidad (8) de determinación de velocidad para determinar la velocidad relativa basándose en la señal de interferencia,
- una unidad (9) de determinación de valor de fiabilidad para determinar un valor de fiabilidad para indicar la fiabilidad de la velocidad relativa determinada, en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar el valor de fiabilidad basándose en al menos uno del grupo que consiste en la señal de interferencia detectada, la velocidad relativa determinada y una característica del láser,
caracterizado porque el primer objeto (12) es un vehículo y en el que el aparato (2) de determinación de velocidad comprende además un sistema (10) de seguridad de vehículo para controlar una unidad (20) de seguridad del vehículo (12) dependiendo de la velocidad relativa determinada y el valor de fiabilidad determinado.
2. Aparato de determinación de velocidad según la reivindicación 1, en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar el valor de fiabilidad basándose en la razón señal a ruido de la señal de interferencia.
3. Aparato de determinación de velocidad según la reivindicación 2, estando adaptado el aparato de determinación de velocidad para aplicar una transformación de Fourier a la señal de interferencia y en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar la razón señal a ruido determinando la altura del pico de la frecuencia fundamental de la señal de interferencia transformada por Fourier, determinando el nivel de ruido de la señal de interferencia transformada por Fourier y dividiendo la altura determinada por el nivel de ruido determinado.
4. Aparato de determinación de velocidad según la reivindicación 1, en el que el aparato de velocidad está adaptado para aplicar una transformación de Fourier a la señal de interferencia y en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar la anchura del pico de la frecuencia fundamental de la señal de interferencia transformada por Fourier y para determinar el valor de fiabilidad basándose en la anchura determinada.
5. Aparato de determinación de velocidad para determinar una velocidad de un objeto según la reivindicación 1, en el que el aparato de velocidad está adaptado para aplicar una transformación de Fourier a la señal de interferencia y en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar características de múltiples picos de la señal de interferencia transformada por Fourier y para determinar el valor de fiabilidad basándose en las características determinadas de múltiples picos de la señal de interferencia transformada por Fourier.
6. Aparato de determinación de velocidad según la reivindicación 1, en el que la característica del láser, en la que se basa la determinación del valor de fiabilidad, es al menos una de la potencia y la temperatura del láser.
7. Aparato de determinación de velocidad según la reivindicación 1, en el que el aparato (2) de determinación de velocidad comprende una unidad (13) de almacenamiento para almacenar velocidades de al menos dos determinaciones de velocidad, en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para determinar el valor de fiabilidad basándose en las velocidades almacenadas en la unidad de almacenamiento.
8. Aparato de determinación de velocidad para determinar una velocidad de un objeto según la reivindicación 1, en el que el aparato (2) de determinación de velocidad comprende
- un láser (18) adicional que tiene una cavidad (14) de láser adicional para emitir una primera radiación (15) adicional para reflejarse por el segundo objeto (1) para generar una radiación (16) reflejada adicional que es una segunda radiación (16) adicional y en el que la primera radiación (15) adicional y al menos una parte de
la segunda radiación (16) adicional interfieren dentro de la cavidad (14) de láser adicional,
- un detector (17) de señal de interferencia adicional para detectar una señal de interferencia adicional, que depende de la interferencia dentro de la cavidad (14) de láser adicional,
en el que la unidad (8) de determinación de velocidad está adaptada para determinar una velocidad relativa adicional basándose en la señal de interferencia adicional,
en el que la unidad (9) de determinación de valor de fiabilidad está adaptada para comparar la velocidad relativa y la velocidad relativa adicional dando un resultado de comparación y para determinar el valor de fiabilidad basándose en el resultado de comparación.
9. Vehículo, que comprende el aparato de determinación de velocidad según la reivindicación 1 para determinar una velocidad relativa entre un primer objeto (12) que es el vehículo, al que se acopla el aparato
(2) de determinación de velocidad, y un segundo objeto (1) .
10. Método de determinación de velocidad, para determinar una velocidad relativa entre un primer objeto (12) que es un vehículo, al que se acopla un aparato (2) de determinación de velocidad según la reivindicación 1, y un segundo objeto (1) , comprendiendo el método de determinación de velocidad las etapas siguientes:
- emitir una primera radiación (5) para reflejarse por el segundo objeto (1) para generar una radiación (6) reflejada que es una segunda radiación (6) mediante un láser (3) que tiene una cavidad (4) de láser, en el que la primera radiación (5) y al menos una parte de la segunda radiación (6) interfieren dentro de la cavidad (4) de láser,
- detectar una señal de interferencia, que depende de la interferencia dentro de la cavidad (4) de láser,
- determinar la velocidad relativa basándose en la señal de interferencia,
- determinar un valor de fiabilidad para indicar la fiabilidad de la velocidad relativa determinada, en el que el valor de fiabilidad se determina basándose en al menos uno del grupo que consiste en la señal de interferencia detectada, la velocidad relativa determinada y una característica del láser, y
- controlar una unidad (20) de seguridad del vehículo (12) dependiendo de la velocidad relativa determinada y el valor de fiabilidad determinado.
11. Programa informático, para determinar una velocidad relativa entre un primer objeto (12) que es un vehículo y un segundo objeto (1) , comprendiendo el programa informático medios de código de programa para hacer que un aparato (2) de determinación de velocidad tal como se define en la reivindicación 1 lleve a cabo las etapas del método de determinación de velocidad tal como se define en la reivindicación 10, cuando el programa informático se ejecuta en un ordenador que controla el aparato (2) de determinación de velocidad.
Patentes similares o relacionadas:
LIDAR basado en SMEM, del 19 de Febrero de 2020, de Windar Photonics A/S: Un sistema LIDAR que comprende: - una sección generadora de haz adaptada para generar un haz de salida ; - una pluralidad de unidades ópticas de enfoque […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Lidar impulsado con amplificador óptico con semiconductor, del 27 de Junio de 2019, de Leosphere: Lidar impulsado que comprende: • un laser principal apto para generar un haz de laser principal (Fm), • un generador de impulsos […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Dispositivo óptico, del 13 de Diciembre de 2018, de MBDA Deutschland GmbH: Dispositivo óptico , en particular para una cabeza buscadora de un misil, que comprende - al menos una fuente de luz , - al menos un dispositivo de detección […]
Dispositivo de determinación de la velocidad del viento que incluye una pluralidad de fuentes láser, del 26 de Octubre de 2016, de Epsiline: Dispositivo de determinación de la velocidad del viento que incluye al menos dos fuentes láser que emiten haces coplanares en diferentes […]
 Dispositivo de medición de la velocidad del viento, del 11 de Marzo de 2016, de Epsiline: Dispositivo de medición de la velocidad del viento, que consta de:
- unos medios de emisión de un haz láser, llamado haz emitido,
- unos medios […]
Dispositivo de medición de la velocidad del viento, del 11 de Marzo de 2016, de Epsiline: Dispositivo de medición de la velocidad del viento, que consta de:
- unos medios de emisión de un haz láser, llamado haz emitido,
- unos medios […]