DISPOSITIVO PARA SOPORTE DE EQUILIBRIO Y ORIENTACIÓN CORPORAL.
Dispositivo para soporte de equilibrio y orientación corporal,
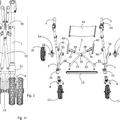
para el control del equilibrio y la orientación del cuerpo en seres humanos con una capacidad reducida para estar de pie y caminar sin la ayuda de las manos, en el que el dispositivo comprende una estructura superior y una estructura inferior, un sistema de suspensión que incluye tres elementos de suspensión cada uno con un primer y un segundo extremo, comprendiendo además el dispositivo un cinturón lumbar (23), configurado para estar en contacto con el individuo, en el que el cinturón lumbar está articulado en tres puntos de conexión (7) de estructura superior a través de los primeros extremos de dichos elementos de suspensión (21) a la estructura superior (6), comprendiendo dicho cinturón lumbar tres puntos de conexión (25) de cinturón lumbar conectados con los segundos extremos de dichos elementos de suspensión, en el que dicha estructura superior (6) está conectada con la estructura inferior (15) que está en contacto con el suelo mediante tres ruedas (36) configuradas para permitir el movimiento de una plataforma definida por ambas estructuras (6, 15) y las ruedas (36) en el plano horizontal, en el que la conexión entre la estructura inferior (15) y la estructura superior (6) se realiza mediante varillas telescópicas (8, 9) y el centro de masa del dispositivo está cerca del suelo, en el que cada elemento de suspensión comprende una cápsula externa (4), una cápsula interna, un resorte (1) dispuesto dentro de la cápsula interna y una varilla longitudinal (2) soportada por la cápsula interna para el movimiento telescópico frente a la fuerza del resorte, en el que la longitud de cada uno de los elementos de suspensión (21) está configurada para regularse por el movimiento de la cápsula externa con respecto a la cápsula interna según las propiedades, características y nivel de discapacidad de cada individuo, por lo que ajustando la rigidez del sistema de suspensión entre el cinturón lumbar y la estructura superior que controla el movimiento relativo del centro de masa y el cuerpo se consigue la inclinación hacia la vertical con respecto a la plataforma
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/056537.
A61H3/04NECESIDADES CORRIENTES DE LA VIDA. › A61CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 3/00 Aparatos para ayudar a caminar a los enfermos o a los inválidos (aparatos para enseñar a caminar a los bebés A47D 13/04). › Apoyos provistos de ruedas para ayudar a caminar a enfermos e inválidos.
Clasificación PCT:
A61H3/00A61H […] › Aparatos para ayudar a caminar a los enfermos o a los inválidos (aparatos para enseñar a caminar a los bebés A47D 13/04).
A61H3/04A61H 3/00 […] › Apoyos provistos de ruedas para ayudar a caminar a enfermos e inválidos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Dispositivo para soporte de equilibrio y orientación corporal. Campo técnico de la invención La invención se refiere a un dispositivo para soporte de equilibrio y orientación corporal, que soluciona el problema técnico de cómo proporcionar un control del equilibrio y la orientación corporal mientras se está de pie y se camina sin la ayuda de las manos a individuos con capacidades físicas comprometidas provocadas por una lesión o enfermedad del sistema nervioso central o por otras razones, por ejemplo, la discapacidad relacionada con la edad, mediante un dispositivo que es modular y cuyo tamaño puede adaptarse al individuo y sus necesidades. Antecedentes de la invención Un posible método para solucionar el problema de proporcionar equilibrio y orientación corporal mientras se está de pie y se camina sin la ayuda de las manos es el uso de un mecanismo robótico en el que el robot aplica movimientos controlados al cuerpo y las extremidades. Los sistemas comerciales disponibles usan dos métodos: 1) control del movimiento de los pies de individuos afectados que simula el movimiento característico de los movimientos de los pies de los individuos sin trastornos ortopédicos, neurológicos o relacionados con la edad paralelamente al soporte del cuerpo mediante un arnés que puede ajustarse para compensar parcialmente la fuerza de la gravedad (Advanced Gait Trainer, RehaStim, Berlín, Alemania), 2) control del movimiento de segmentos de las extremidades inferiores en individuos afectados a lo largo de trayectorias que son parecidas a las trayectorias características del movimiento de individuos sin trastornos ortopédicos, neurológicos o relacionados con la edad paralelamente al soporte del cuerpo mediante un arnés que puede ajustarse para compensar parcialmente la fuerza de la gravedad y el uso de una cinta sin fin accionada (Locomat, Hokoma, Suiza). Se están desarrollando dispositivos similares en otros centros de investigación aunque usando los principios descritos anteriormente, por ejemplo Altacro, Universidad Libre de Bruselas, Bélgica). Se ha demostrado que son satisfactorios para restablecer las capacidades de la marcha, reducir la insuficiencia funcional así como para aumentar la movilidad de personas que han sobrevivido a un accidente cerebrovascular y pacientes con espasticidad. Debido a la configuración de la cinta sin fin, este tipo de equipo está limitado al entrenamiento de la marcha recta a nivel del suelo, y no puede ayudarse a la movilidad en las situaciones diarias. La alternativa a los dispositivos estacionarios son los andadores con y sin ruedas de diferentes tipos que en la mayor parte de los casos no permiten estar de pie ni caminar sin la ayuda de las manos. La descripción abreviada de los andadores con y sin ruedas representativos es la siguiente: Andadores convencionales: un andador convencional puede incluir ruedas y frenos de tipo deslizamiento. Un andador con ruedas es el que tiene 2, 3 ó 4 ruedas. Las ruedas pueden ser fijas o giratorias. Puede tener una altura fija o ajustable. Puede incluir o no frenos de tipo deslizamiento o equivalentes. Un freno de tipo deslizamiento consiste en un mecanismo de resorte, o equivalente, que levanta el montante de la pata del andador del suelo cuando la persona no está empujando hacia abajo sobre la estructura. Andadores y gateadores pediátricos: las sillitas especialmente adaptadas pueden considerarse necesarias desde el punto de vista médico cuando se usan en lugar de una silla de ruedas para niños. Andador de alta resistencia: un andador de alta resistencia es aquél etiquetado como capaz de soportar a personas que pesan más de 136 kilos. Puede tener una altura fija o ajustable. Puede ser rígido o plegable. Un andador de alta resistencia se considera necesario desde el punto de vista médico para personas que cumplen criterios médicos necesarios para un andador convencional y que pesan más de 136 kilos. Un andador de alta resistencia puede incluir ruedas y frenos de tipo deslizamiento. Un andador con ruedas es el que tiene 2, 3 ó 4 ruedas. Las ruedas pueden ser fijas o giratorias. Puede tener una altura fija o ajustable. Puede incluir o no frenos de tipo deslizamiento, o equivalentes. Un freno de tipo deslizamiento consiste en un mecanismo de resorte, o equivalente, que levanta el montante de la pata del andador del suelo cuando la persona no está empujando hacia abajo sobre la estructura. Andador de alta resistencia, de sistema de frenado múltiple, con una resistencia de las ruedas variable: un andador de alta resistencia, de sistema de frenado múltiple, con una resistencia de las ruedas variable se considera necesario desde el punto de vista médico para personas que cumplen criterios médicos para un andador convencional y que no pueden usar un andador convencional debido a un trastorno neurológico grave u otro estado que da lugar al uso limitado de una mano. La obesidad, por sí misma, no se considera una indicación necesaria desde el punto de vista médico para este andador. Un andador de alta resistencia, de sistema de frenado múltiple y con una resistencia de las ruedas variable es un andador de 4 ruedas, ajustable en altura, plegable que tiene las siguientes características. Este soporte puede soportar individuos que pesen más de 159 kilos y tiene frenos que se operan con la mano que hacen que las ruedas se bloqueen cuando se sueltan las palancas de mano, y los frenos de mano pueden ajustarse de modo que cualquiera de los dos pueda bloquear las ruedas, y la presión requerida para operar cada freno de mano puede ajustarse individualmente, y hay un mecanismo de frenado adicional en la barra transversal frontal, y al menos dos 2 ruedas tienen frenos que pueden ajustarse independientemente ajustando la tensión para proporcionar una resistencia variable. Andador con estructura cerrada: un andador con estructura cerrada es un andador con ruedas plegable que tiene una estructura que rodea completamente a la persona y tiene un asiento acoplado en la parte posterior. Un andador del estado de la técnica con un control pasivo es el andador NF (Norsk Funktion, Noruega). Permite a niños con problemas de equilibrio estar de pie y caminar y proporciona cierta coordinación básica mediante dos bandas elásticas. El requisito previo para usar el andador NF es una funcionalidad activa mínima de los miembros inferiores. Las desventajas son las dificultades para maniobrar en espacios pequeños y los patrones de marcha poco naturales. Finalmente, las soluciones más sofisticadas, aún en el dominio de ideas y prototipos sugieren el uso de robots humanoides, por ejemplo, el traje robot HAL5 (Universidad de Tsukuba, Japón). HAL5 puede ayudar a caminar o elevar objetos pesados y usa sensores bioeléctricos acoplados a la piel para monitorizar las señales transmitidas desde el cerebro al músculo particular. Esta señal nerviosa genera una corriente eléctrica en la superficie de la piel que se traduce en señales para motores eléctricos en las articulaciones de la cadera y la rodilla. Este procedimiento es definitivamente controvertido en este momento. Debido a este procesamiento de información electrónico, los actuadores exoesqueléticos responden más rápidamente que los músculos humanos. La desventaja de este tipo de robots es la limitación para amplificar la intención de los usuarios. Para ayudar a seres humanos con falta de equilibrio, tales exoesqueletos tienen que integrarse con modelos de marcha. Su gran potencial en la rehabilitación es la capacidad para proporcionar ayuda a ambos pares de miembros y a miembros individuales más débiles. Las patentes relacionadas con el desarrollo de la nueva idea presentada en esta solicitud son: El documento US-B1-6527285 da a conocer un dispositivo para soporte de equilibrio y orientación corporal, para el control del equilibrio y la orientación corporal en seres humanos con capacidad reducida para mantenerse en pie y caminar sin la ayuda de las manos, en el que el dispositivo comprende una estructura superior e inferior, un sistema de suspensión, comprendiendo además el dispositivo un cinturón lumbar configurado para interactuar con el individuo, en el que dicha estructura superior está conectada con la estructura inferior que está en contacto con el suelo por medio de tres ruedas configuradas para permitir el movimiento de una plataforma definida por ambas estructuras y las ruedas en un plano horizontal, siendo provista la conexión entre la estructura inferior y la superior por medio de varillas telescópicas y el centro de masa del dispositivo está cerca del suelo. La patente estadounidense n. o US 7,111,856 (Graham, 26 de septiembre, 2006) da a conocer un método y aparato de ayuda al movimiento bípedo que comprende un sistema de soporte móvil que tiene una región central que permite que las extremidades inferiores se muevan libremente y que proporciona un... [Seguir leyendo]
Reivindicaciones:
1 Dispositivo para soporte de equilibrio y orientación corporal, para el control del equilibrio y la orientación del cuerpo en seres humanos con una capacidad reducida para estar de pie y caminar sin la ayuda de las manos, en el que el dispositivo comprende una estructura superior y una estructura inferior, un sistema de suspensión que incluye tres elementos de suspensión cada uno con un primer y un segundo extremo, comprendiendo además el dispositivo un cinturón lumbar (23), configurado para estar en contacto con el individuo, en el que el cinturón lumbar está articulado en tres puntos de conexión (7) de estructura superior a través de los primeros extremos de dichos elementos de suspensión (21) a la estructura superior (6), comprendiendo dicho cinturón lumbar tres puntos de conexión (25) de cinturón lumbar conectados con los segundos extremos de dichos elementos de suspensión, en el que dicha estructura superior (6) está conectada con la estructura inferior (15) que está en contacto con el suelo mediante tres ruedas (36) configuradas para permitir el movimiento de una plataforma definida por ambas estructuras (6, 15) y las ruedas (36) en el plano horizontal, en el que la conexión entre la estructura inferior (15) y la estructura superior (6) se realiza mediante varillas telescópicas (8, 9) y el centro de masa del dispositivo está cerca del suelo, en el que cada elemento de suspensión comprende una cápsula externa (4), una cápsula interna, un resorte (1) dispuesto dentro de la cápsula interna y una varilla longitudinal (2) soportada por la cápsula interna para el movimiento telescópico frente a la fuerza del resorte, en el que la longitud de cada uno de los elementos de suspensión (21) está configurada para regularse por el movimiento de la cápsula externa con respecto a la cápsula interna según las propiedades, características y nivel de discapacidad de cada individuo, por lo que ajustando la rigidez del sistema de suspensión entre el cinturón lumbar y la estructura superior que controla el movimiento relativo del centro de masa y el cuerpo se consigue la inclinación hacia la vertical con respecto a la plataforma. 2. Dispositivo para soporte de equilibrio y orientación corporal según la reivindicación 1, caracterizado porque la estructura inferior (15) está configurada para asegurar que una rueda frontal (36) esté en los ejes centrales del cuerpo del usuario en el plano sagital, y que dos ruedas laterales (36) estén por detrás del centro de masa de manera simétrica con el plano sagital a una distancia que garantiza que el centro de masa se proyecte delante de un centro de presión del dispositivo cuando un individuo está usando la plataforma. 3. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque la longitud de cada varilla telescópica (8, 9) puede fijarse mediante un mecanismo de sujeción (18). 4. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque un extremo superior de cada varilla telescópica (8, 9) está conectado, de manera articulada, a la estructura superior (6) a través de un elemento de unión (10) con tres grados de libertad configurado para permitir la colocación automática de la estructura superior (6). 5. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque el cinturón lumbar (23) está reforzado con barras de resorte integradas en el cinturón lumbar (23), en el que el perímetro del cinturón lumbar (23) puede ajustarse mediante una lengüeta (26) que tiene medios de fijación rápida. 6. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque la estructura inferior (15) comprende dos perfiles macizos simétricos (20) configurados para asegurar que el centro de masa del dispositivo esté cerca del suelo, en el que los perfiles macizos (20) están configurados para permitir una separación. 7. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque el cinturón lumbar (23) está reforzado con tres barras axiales (27) integradas en el cinturón lumbar (23), y una capa interna del cinturón lumbar (23) comprende cámaras de aire (28) y una bomba (29) para una buena adaptación a los contornos corporales del usuario. 8. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque la estructura superior (6) comprende una placa de conexión frontal (32) y dos placas de conexión laterales (33), en el que se proporcionan uniones que permiten la colocación vertical y horizontal de los extremos de los elementos de suspensión (21). 9. Dispositivo para soporte de equilibrio y orientación corporal según cualquiera de las reivindicaciones anteriores, caracterizado porque la estructura inferior (15) tiene tres uniones giratorias verticales (35) en el plano sagital central frontal del dispositivo, y en ambos extremos posteriores de los perfiles (20), estando configuradas dichas uniones giratorias verticales (35) para permitir el giro controlado alrededor de los ejes verticales de las ruedas (36), obteniendo de este modo maniobrabilidad del dispositivo durante la marcha. 11 12 13 14
Patentes similares o relacionadas:
ANDADOR, del 27 de Marzo de 2020, de UNIVERSIDAD POLITECNICA DE MADRID: Andador para uso tanto en el interior como en el exterior de una vivienda, que está dotado de un primer y un segundo medio de agarre para permitir el apoyo […]
Disposición de trinquete para un dispositivo de apoyo a la movilidad, del 12 de Febrero de 2020, de Rebotec Rehabilitationsmittel GmbH: Disposición de trinquete para un dispositivo de apoyo a la movilidad, en particular para un larguero regulable en altura de un dispositivo de apoyo a la movilidad, con […]
Ayuda para caminar con ruedas que comprende un peso que ejerce una fuerza hacia arriba, del 22 de Enero de 2020, de Medical Robots: Una ayuda para caminar adecuada para soportar a los pacientes para ser asegurada al lado posterior de un paciente, que comprende:
- un bastidor soportado solamente […]
Soporte o portador con ruedas abatible, del 30 de Octubre de 2019, de Trionic Sverige AB: Soporte o portador con ruedas propulsado a mano abatible, tal como como un andador tipo rollator, andador, silla de paseo o sillita, que comprende:
[…]
Recipiente de productos para dispositivo de ayuda a la marcha y dispositivo de ayuda a la marcha asociado, del 14 de Octubre de 2019, de UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA: 1. Recipiente de productos para dispositivo de ayuda a la marcha que comprende medios de fijación al dispositivo de ayuda a […]
Estructura de soporte, del 11 de Septiembre de 2019, de Hexowheel: Una estructura de soporte que comprende:
- una parte de recepción de carga , 5 diseñada para recibir una carga a transportar o asistir durante el movimiento;
[…]
Andador, del 14 de Agosto de 2019, de ORMESA S.R.L: Andador que comprende un bastidor base soportado por ruedas y barras de soporte montadas en el bastidor base para soportar, a […]
APARATO PARA ESTIMULAR EL GATEO EN BEBÉS, del 8 de Agosto de 2019, de UNIVERSIDAD TECNOLÓGICA DE PANAMÁ (UTP): La presente invención se relaciona al campo de los muebles especialmente adaptados para niños, más específicamente otros muebles para bebés y en específico proporciona un aparato […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Soporte o portador con ruedas abatible, del 30 de Octubre de 2019, de Trionic Sverige AB: Soporte o portador con ruedas propulsado a mano abatible, tal como como un andador tipo rollator, andador, silla de paseo o sillita, que comprende:
[…]
Soporte o portador con ruedas abatible, del 30 de Octubre de 2019, de Trionic Sverige AB: Soporte o portador con ruedas propulsado a mano abatible, tal como como un andador tipo rollator, andador, silla de paseo o sillita, que comprende:
[…]